






–
文章目录
一、深度学习平台简介

1.1 PyTorch简介
- PyTorch是一个Python的深度学习库。它最初由Facebook人工智能研究小组开发,而优步的Pyro软件则用于概率编程。
- 最初,PyTorch由Hugh Perkins开发,作为基于Torch框架的LusJIT的Python包装器。PyTorch在Python中重新设计和实现Torch,同时为后端代码共享相同的核心C库。
- 除了Facebook之外,Twitter、GMU和Salesforce等机构都采用了PyTorch。
- 到目前,据统计已有80%的研究采用PyTorch,包括Google
学习资源:动手学深度学习 官方教程
1.1.1 PyTorch与TensorFlow2的对比
| PyTorch | TensorFlow2 |
|---|---|
| 上手简单、学习速度快 | 上手难 |
| 部署能力稍弱 | 部署方便、稳定 |
| 支持动态图 | 支持动态图 |
| 函数简洁、运用灵活 | 函数封装复杂 |
1.1.2 PyTorch基本概念
- 张量
是一个物理量,对高维(维数 ≥ 2) 的物理量进行“量纲分析” 的一种工具。简单的可以理解为:一维数组称为矢量,二维数组为二阶张量,三维数组为三阶张量 - 计算图
用“结点”(nodes)和“线”(edges)的有向图来描述数学计算的图像。“节点” 一般用来表示施加的数学操作,但也可以表示数据输入的起点/输出的终点,或者是读取/写入持久变量的终点。“线”表示“节点”之间的输入/输出关系。这些数据“线”可以输运“size可动态调整”的多维数据数组,即“张量”(tensor) - 使用 tensor 表示数据
- 使用 Dataset、DataLoader 读取样本数据和标签
- 使用变量 (Variable) 存储神经网络权值等参数
- 使用计算图 (computational graph) 来表示计算任务
- 在代码运行过程中同时执行计算图
1.1.3 简单示例
构建简单的计算图,每个节点将零个或多个tensor作为输入,产生一个tensor作为输出。PyTorch中,所见即为所得,tensor的使用和numpy中的多维数组类似:
import torch
x_const = torch.tensor([1.0, 2.0, 3.0])
y = torch.tensor([3.0, 4.0, 5.0])
output = x_const + y
print(x_const, '\n', y, '\n',output)
1000个散点样本,求出回归方程
定义网络 :
import torch.nn as nn
class LinearRegression(nn.Module):
def __init__(self):
super(LinearRegression, self).__init__()
self.linear = nn.Linear(1, 1) # 输入和输出的维度都是1
def forward(self, x):
out = self.linear(x)
return out
进行训练:
model = LinearRegression()
params = list(model.named_parameters())
(_, w) = params[0]
(_, b) = params[1]
criterion = nn.MSELoss()
optimizer = torch.optim.SGD(model.parameters(), lr=0.3)
x = torch.unsqueeze(torch.linspace(-1, 1, 100), dim=1)
y = 2*x + 10 + torch.rand(x.size())
for epoch in range(20):
inputs = x
target = y
out = model(inputs) # 向前传播
loss = criterion(out, target) # 向后传播
optimizer.zero_grad() # 注意每次迭代都需要清零
loss.backward()
optimizer.step()
print('Epoch: {}, w: {:.4f},b:{:.4f}'.format(epoch + 1, float(w.data),
float(b.data)))
model.eval()
二、卷积神经网络基础
2.1 基本概念
- 全连接网络:链接权过多,难算难收敛,同时可能进入局部极小值,也容易产生过拟合问题
- 局部连接网络:顾名思义,只有一部分权值连接。部分输入和权值卷积。
- 填充(Padding),也就是在矩阵的边界上填充一些值,以增加矩阵的大小,通常用0或者复制边界像素来进行填充。

- 步长(Stride):如图步长为2

- 多通道卷积:如RGB
- 池化(Pooling)
思想:使用局部统计特征,如均值或最大值。解决特征过多问题

- 卷积神经网络结构
构成:由多个卷积层和下采样层构成,后面可连接全连接网络
卷积层:k个滤波器
下采样层:采用mean或max
后面:连着全连接网络

- 学习算法 递推
前向传播定义为:
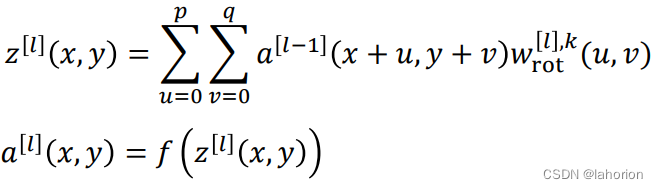
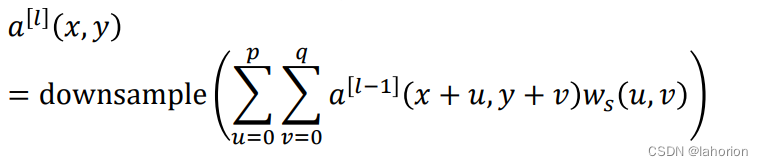
如果第𝑙层是卷积+池化层,则:
三、LeNet-5网络
3.1 网络结构

3.1.1 结构详解
- C1层
6个Feature map构成
每个神经元对输入进行55卷积
每个神经元对应55+1个参数,共6个feature map,
2828个神经元,因此共有
(55+1)6(28*28)=122,304连接 - S2层 Pooling层

- C3层 卷积层

- S4层 与S2层工作相同
- C5层
120个神经元
每个神经元同样对输入进行55卷积,与S4全连接
总连接数(55*16+1)*120=48120 - F6层
84个神经元
与C5全连接
总连接数(120+1)*84=10164 - 输出层
由欧式径向基函数单元构成
每类一个单元
输出RBF单元计算输入向量和参数向量之间的欧式距离 - 网络结构

3.1.2 与现在网络区别
- 卷积时不进行填充(padding)
- 池化层选用平均池化而非最大池化
- 选用Sigmoid或tanh而非ReLU作为非线性环节激活函数
- 层数较浅,参数数量小(约为6万)
普遍规律——随网络深入,宽、高衰减,通道数增加
3.1.3 误差反向传播
随着网络深入,宽、高衰减,通道数增加。依然使用经典的BP算法进行权值更新。
池化层根据是平均池化还是最大值池化,将误差反传至卷积层:


误差从卷积层传回池化层:

式中五角星表示图像卷积,计算时需首先上下、左右翻转后再做相关
网络结构可视化:https://adamharley.com/nn_vis/cnn/3d.html
3.1.4 LeNet5代码实现
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
"""使用GPU计算模型在数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() # 设置为评估模式
if not device:
device = next(iter(net.parameters())).device
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型(在第六章定义)"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,样本数
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









