







一、设计任务
本文设计了一种基于STM32单片机和利用WIFI控制方式下的一种实时视频智能小车,所应用设计的一种新型的智能小车,采用了一种新型的控制系统,可以实现对直流电动机的速度、方向的控制。为保证实时视频智能小车能够安全、快速、稳定的运行,它的系统将会自动识别、使其相应的转向伺服电机和直流电机快速而稳定的控制。本论文中的方案的最大亮点是WIFI智能,它利用高速的 WIFI信号,实现小车的前进、后退、转弯、摄像头的实时拍摄,有着高度的智能化、人性化。
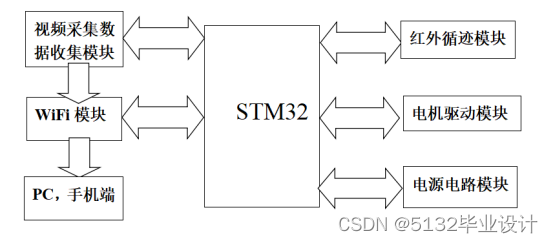
二、总体设计
本论文所设计的智能小车系统的主要功能包括:
(1)运动功能:主要包含智能小车的前进、后退、向左、向右等一些基本的动作机能;
(2)循迹避障功能:通过红外传感器进行障碍物的规避,利用算法优化来按照合适的路径进行循迹,真正做到“无人驾驶”控制。
(3)实时视频传输功能:利用 WIFI信号的高速性的特点,进行信号传输,将上位机(手机APP或PC)和下位机(智能小车)相连。实现了实时视频智能小车的指令到达和视频的实时传输,抓拍。
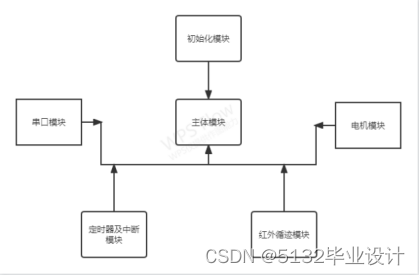
三、硬件设计
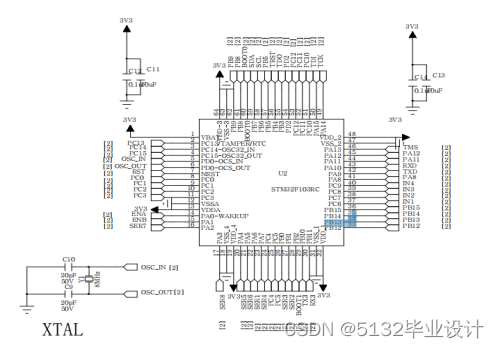
1、单片机主控模块
在本论文中,实时视频智能小车的单片机主控模块是系统的核心,它主要负责采集和处理各种各样的数据,对各个模块的工作进行协调,按计划完成每一项工作,是整个系统中最重要的模块,本文中的系统采用STM32系列微处理器。
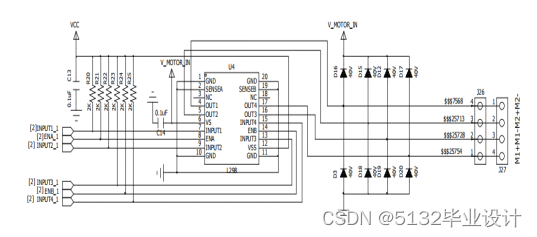
2、电机驱动模块
在本论文中实时视频智能小车所采用的电机驱动模块是L298N,它的功能完善、成本低。
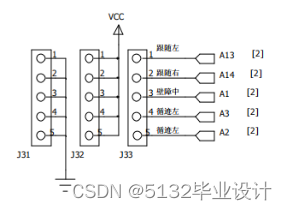
3、红外循迹模块
实时视频智能小车在行进过程中需要对行进的道路检测,这样才能够在安全而有效的在道路中行进,这时候就需要一种装置能够检测道路路线,根据路线进行循迹。而本论文所采用的循迹模块是红外循迹模块。
4、WIFI模块
实时视频智能小车所用的WIFI模块是AR9331,是由小R科技公司自主研发的一款车载WIFI。

5、视频采集传输模块
所以本论文选择使用USB摄像头作为实时视频智能小车的视频采集传输模块。通过舵机的控制,来实现摄像头云台处的左右180°的转向和上下90°的转向,从而实现在空间内几乎无死角的实时视频传输。

四、软件设计
1、主程序的设计
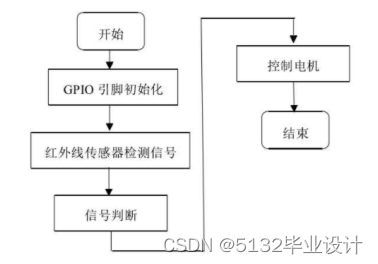
2、循迹程序模块的设计
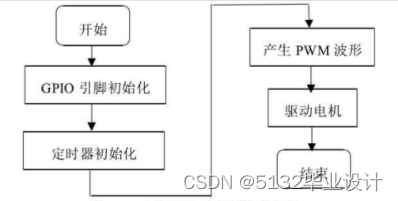
3、电机控制模块程序的设计
五、调试
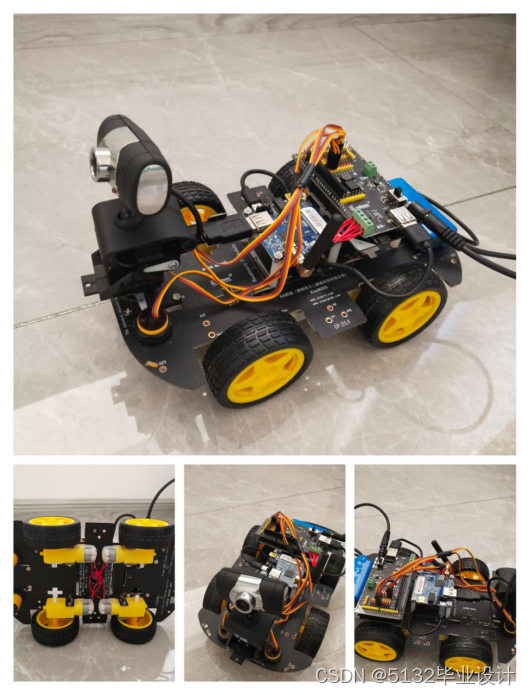
(1)实时视频小车基本运动功能的实现与调试
通过IAR对实时视频智能小车程序的调试,而实时视频智能小车通过手机APP的软件连接小车的车载WIFI可以实现前后两个轮子的旋转,实现前进、后退等操纵。实时视频智能小车车底有两个红外传感模块,当两个红外传感模块不在黑线上时,如果遇到黑线,智能小车就会改变方向,脱离黑线。如果有一条直线,那么实时视频智能小车就会停下来,可以很好的追踪。在遇到障碍时,实时视频智能小车可以很好地利用转向操作来规避障碍。
(2)实时视频智能小车实时视频的传输
在进行实时视频智能小车的实时视频的传输时,首先打开实时视频智能小车的开关,等待30秒左右,在手机或者PC中搜索名称为wifi-robots.com-00EED4这样的WIFI信号,然后打开APP,进入到控制界面就可以实现实时视频传输,对于一些重要的时刻,还可以进行抓拍等行为,如下图 5.2所示是实时视频智能小车的抓拍及控制界面。
*#include "Include.h"
* 函数名:main
* 描述 :程序入口函数
* 输入 :无
* 输出 :无
* 调用 :无
void main(void)
{/* 设置系统时钟为72M */SystemInit();
SysTick_Configuration(); //SysTick中断配置,主要用来定时
LCD_12864_init();//液晶屏初始化
GPIO_ALL_Config(); //GPIO初始化
Init_LED(); //流水灯等延时38秒等待WIFI模块启动
Init_Steer(); //舵机角度初始化
TIM2_PWM_Init(); //定时器2(舵机PWM初始化)
TIM4_Init(); //定时器4(计时)
TIM5_PWM_Init(); //定时器5(电机速度PWM初始化)
USART1_Config(); //串口初始化
while (1)
{MENU(Level,Mode);
Cruising();//模式功能切换
}}
2.下面是小车的部分初始化程序。
#include "Include.h"
* 函数名:GPIO_ALL_Config
* 描述 :所有功能引脚初始化
* 输入 :无
* 输出 :无
* 调用 :初始化中调用
void GPIO_ALL_Config(void) //所有功能引脚初始化
{ Infrared_GPIO_Config(); //跟随、避障红外引脚初始化
MOTOR_GPIO_Config(); //电机引脚初始化
Light_Config(); //车灯引脚初始化
Fllow_GPIO_Config(); //循迹红外引脚初始化
TIM2_Servo_GPIO_Config(); //定时器2(舵机引脚初始化)
LED_GPIO_Config(); //初始化LED1、LED2流水灯
Key_Configuration()}; //按键GPIO及中断响应设置}
* 函数名:Infrared_GPIO_Config
* 描述 :电机引脚初始化
* 输入 :无
* 输出 :无
* 调用 :功能函数中调用
void MOTOR_GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 |GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_ResetBits(GPIOC, GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 |GPIO_Pin_9);}
* 函数名:Light_Config
* 描述 :车灯初始化
* 输入 :无
* 输出 :无
* 调用 :功能函数中调用
void Light_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_ResetBits(GPIOC, GPIO_Pin_0); }
* 函数名:Fllow_GPIO_Config
* 描述 :红外循迹引脚初始化
* 输入 :无
* 输出 :无
* 调用 :功能函数中调用
void Fllow_GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_13|GPIO_Pin_14);
3.下面是电动机控制模块的部分程序。
#include "Include.h"
* 函数名:forward
* 描述 :校准后的前进方向
* 输入 :adjust
* 输出 :无
* 调用 :功能函数中调用
void forward(int adjust)
{Set_Left_Speed(speed_left);
Set_Right_Speed(speed_right);
switch(adjust)
{case 1:MOTOR_GO_FORWARD;return;
case 2:MOTOR_GO_FORWARD;return;
case 3:MOTOR_GO_BACK;return;
case 4:MOTOR_GO_BACK;return;
case 5:MOTOR_GO_LEFT;return;
case 6:MOTOR_GO_LEFT;return;
case 7:MOTOR_GO_RIGHT;return;
case 8:MOTOR_GO_RIGHT;return;
default:return; }}
4.实时视频智能小车中定时器及中断模块部分程序的设计。
#include "SysTick.h"
static __IO u32 TimingDelay;
* 函数名:SysTick_Init
* 描述 :启动系统滴答定时器 SysTick
* 输入 :无
* 输出 :无
* 调用 :外部调用
void SysTick_Init(void)
{/* SystemCoreClock / 1000 1ms中断一次
* SystemCoreClock / 100000 10us中断一次
* SystemCoreClock / 1000000 1us中断一次
if (SysTick_Config(SystemCoreClock / 1000000))
{ /* Capture error */
while (1);}}
* 函数名:Delay_us
* 描述 :us延时程序,10us为一个单位
* 输入 :- nTime
* 输出 :无
* 调用 :Delay_us( 1 ) 则实现的延时为 1 * 10us = 10us* :外部调用
void Delay_us(__IO u32 nTime)//已改为us
{ TimingDelay = nTime;
while(TimingDelay != 0);}
* 函数名:Delay_ms
* 描述 :ms延时程序
* 输入 :- nTime
* 输出 :无
* 调用 :* :外部调用
void Delay_ms(__IO u32 nTime)
{ TimingDelay = nTime*1000;
while(TimingDelay != 0);}
* 函数名:Delay_s
* 描述 :秒延时程序
* 输入 :- nTime
* 输出 :无
* 调用 :* :外部调用
void Delay_s(__IO u32 nTime)
{ TimingDelay = nTime*1000000;
while(TimingDelay != 0);}
* 函数名:TimingDelay_Decrement
* 描述 :获取节拍程序
* 输入 :无
* 输出 :无
* 调用 :在 SysTick 中断函数 SysTick_Handler()调用
void TimingDelay_Decrement(void)
{if (TimingDelay != 0x00)
{ TimingDelay--;}}
void SysTick_Configuration(void)
{/* Setup SysTick Timer for 10 msec interrupts */
if (SysTick_Config(SystemCoreClock / 1000000)) //SysTick配置函数
{ /* Capture error */
while (1);}
/* Configure the SysTick handler priority */
NVIC_SetPriority(SysTick_IRQn, 0x0);//SysTick中断优先级设置
}

















 6549
6549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











