







无刷舵机和普通舵机的区别
有刷电机
有刷电机的主要结构就是定子+转子+电刷,通过旋转磁场获得转动力矩,从而输出动能。电刷与换向器不断接触摩擦,在转动中起到导电和换相作用。
无刷电机
无刷电机中,换相的工作交由控制器中的控制电路(一般为霍尔传感器+控制器,更先进的技术是磁编码器)来完成。
无刷电机采取电子换向,线圈不动,磁极旋转。无刷电机,是使用一套电子设备,通过霍尔元件,感知永磁体磁极的位置,根据这种感知,使用电子线路,适时切换线圈中电流的方向,保证产生正确方向的磁力,来驱动电机。消除了有刷电机的缺点。
数字舵机(Digital Servo)和模拟舵机(Analog Servo)
数字舵机(Digital Servo)和模拟舵机(Analog Servo)在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟舵机的最大区别则体现在控制电路上,数字舵机的控制电路比模拟舵机的多了微处理器和晶振。不要小看这一点改变,它对提高舵机的性能有着决定性的影响。
数字舵机在以下两点与模拟舵机不同:
- 处理接收机的输入信号的方式;
- 控制舵机马达初始电流的方式,减少无反应区(对小量信号无反应的控制区域),增加分辨率以及产生更大的固定力量。
模拟舵机在空载时,没有动力被传到舵机马达。当有信号输入使舵机移动,或者舵机的摇臂受到外力的时候,舵机会作出反应,向舵机马达传动动力(电压)。
模拟舵机的“缺点”是:假设一个短促的动力脉冲,紧接着很长的停顿,并不能给马达施加多少激励,使其转动。这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始脉冲到马达,这是非常低效率的。
llc总线
I2C总线一般由两根数据传输线构成:一根时钟线 (SCL) 、一根数据线 (SDA) 。I2C总线协议一般要求每次发送字节的长度必须为8位, 每次通信由主机、从机两端完成。
I2C写操作流程为:
(1) 主机发起开始信号;
(2) 主机发送I2C地址 (7位) 和写操作0 (1位) , 等待确认;
(3) 从机发送确认;
(4) 主机发送寄存器地址 (8位) , 等待确认;
(5) 从机发送确认;
(6) 主机发送数据 (8位) , 即要向寄存器中写入的数据, 等待确认;从机发送确认;
(7) 主机发起停止。
I2C读操作流程为:
(1) 主机发送I2C地址 (7位) 和写操作0 (1位) , 等待确认;
(2) 从机发送确认;主机发送寄存器地址 (8位) , 等待确认;
(3) 主机发送开始;主机发送I2C地址 (7位) 和读操作 (1位) , 等待确认;
(4) 从机发送确认;从机发送数据 (8位) 。
(5) 主机发送确认。
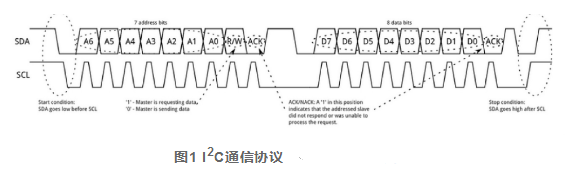
从以上分析可以看出, I2C总线通信只需要两根线 (SCL和SDA) , 可并联多个外设使用, 通过每个外设的I2C地址区分不同外设。
PCA9685芯片
PCA9685是一款基于I2C总线控制的16路LED背光调节控制芯片。每一路LED输出端均可自由调节PWM波的频率 (40~1000Hz和占空比 (0%~100%) 。这款芯片主要通过输出不同占空比的PWM脉冲信号来控制舵机转动的角度。
疑问或建议
- 课程间隔时间不要太长。
- 可以多安排几节课。
- 没了。
特点
SpotMini:步态规划、平衡控制、复杂地形动态规划以及自我回正属于机器人的运动控制,通过判断关节承受的载荷类型和大小,以选择适当的液压或电动致动器,使得机器人的功率消耗最低SpotMini具有 17个自由度,其中有 5个自由度位于其顶部的机械臂上,其余 12个自由度平均分布于四肢。SpotMini的机械臂上搭载了一个摄像头,这有助于帮助机械手准确地找到目标物体。除此之外,SpotMini的正前方还搭载了一套 3D 立体摄像头,这可以帮助它更好地观察前方的障碍物情况
猎豹机器人是一个灵活的四足机器人,能够后空翻、奔跑、侧身跑、横着走、倒着走、跳跃 ,迷你猎豹延续了第三代猎豹机器人的优点,特别抗踢。
宇树科技还自行研究了电机,减速机、传感器和电机驱动等核心部件,以及控制算法和控制器,高度的自主研发,使得A1能发挥出极佳的性能,而产品价格上更具优势。
阿尔法机器狗AlphaDog:
• 全球行走速度最快的机器狗产品
• 全球第一款可以动态调节行走宽度的机器狗产品
• 全球第一款可以动态调节支撑面积的机器狗产品
• 全球行走高度调节能力最强的机器狗产品
• 推动恢复
• 侧向移动
• 原地转向
• 摔倒自动翻身
• 九大步态


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









