






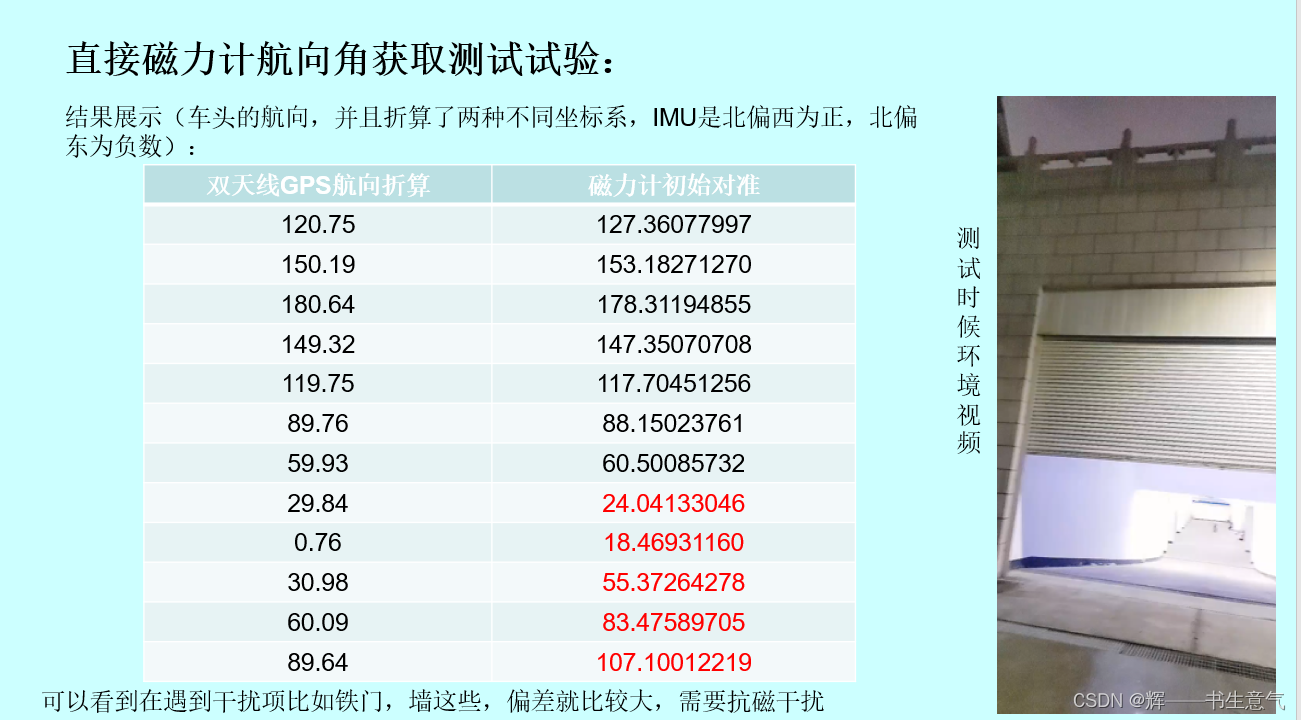
组合导航初始对准方案是个很值得研究的问题,这里浅介绍下用严老师代码中的磁力计来进行初始航向对比,诸君可以作为参考。ppt中的视频在我主页视频里有
结果如下:都是进行转化的
代码使用的严老师的c++代码:
void SingleGps::PosAttInit(CVect3 &att_init,u8 alignTime_s,bool &isInit,CVect3 &posInit,bool &isAHRS)
{
cout<<"进行初始化了"<<endl;
CQuat qnb0(1,0,0,0); att_init=O31;
IMU9 imuData; GpsDataAddTime gpsData;//
double gpsYaw=0.0,accBuf[3]={0.0},magBuf[3]={0.0},gyroBuf[3]={0.0},posBuf[3]={0.0};
int cnt = alignTime_s / TS,tmp=cnt;
bool hasGpsData = false,hasImuData = false;//标志位
ros::Time start_time = ros::Time::now();
ros::Duration total_time(alignTime_s); // 3 seconds
do
{
hasImuData = checkIMUData(imuData);
hasGpsData = checkGPSData(gpsData);
//cout<<fixed<<setprecision(8)<<"磁力计:"<<imuData.mag_x<<" "<<imuData.mag_y<<" "<<imuData.mag_z<<endl;
int count=0;
if(hasImuData)//获取imu9数据
{
accBuf[0]+=imuData.acc_x;accBuf[1]+=imuData.acc_y;accBuf[2]+=imuData.acc_z;
gyroBuf[0]+=imuData.gyro_x;gyroBuf[1]+=imuData.gyro_y;gyroBuf[2]+=imuData.gyro_z;
magBuf[0]+=imuData.mag_x;magBuf[1]+=imuData.mag_y;magBuf[2]+=imuData.mag_z;
tmp--;
hasImuData=false;
}
if(hasGpsData && newGpsDataAvailable && gpsData.gpsdata.fix==4)
{
posBuf[0]=gpsData.gpsdata.latitude;
posBuf[1]=gpsData.gpsdata.longitude;
posBuf[2]=gpsData.gpsdata.altitude;
}
}while(tmp);
ros::Time end_time = ros::Time::now();
ros::Duration duration = end_time - start_time;
cout<<"初始化所用时间:"<<duration.toSec()<<endl;
// //获取几秒数据的平均值
CVect3 Acc = CVect3(accBuf) / cnt;
//陀螺仪数据
CVect3 Gyro= CVect3(gyroBuf) / cnt;
//磁力计数据
CVect3 Mag = CVect3(magBuf) / cnt;
//位置
posInit=CVect3(posBuf);//获取初始状态
cout<<fixed<<setprecision(8)<<"初始化的位置:"<<posInit.i<<" "<<posInit.j<<endl;
//将其他方向安装的IMU转换为载体“右前上”方向 FRD是当前坐标系,这个函数是把它转化为右前上坐标系
//IMURFU(&Mag,1,"RFU");
//进行椭球拟合
Mag = (Mag-b)*A;//A为软磁校正,b为硬磁校正
//初始姿态获取
att_init.i=asin(Acc.j/G0);
att_init.j=-atan2(Acc.i,Acc.k);
Mag = a2qua(att_init) * Mag;
double yaw = atan2Ex(Mag.i,Mag.j) + declination*DEG; //可以直接调用老师的 magyaw函数
if(yaw>M_PI) yaw = yaw - 2*M_PI;
else if(yaw<-M_PI) yaw = yaw + 2*M_PI;
att_init.k = yaw;
isInit=true;//已经完成了初始化
isAHRS=true;
}
截取了我的代码,这里运用了严老师的代码,因为是ros环境,数据输入啥的是用的回调函数来的,可以根据自己系统来。可以看下大致思路。
需要指出的是,如果磁力计不进行椭球拟合,效果会差很多。拟合代码我结合了rosbag的特征和西工大朱同学的代码,如下:
可以提供一下下面的代码作为参考,请放置在psins工具箱里,有不少函数需要用的严老师工具箱里的东西。
具体代码我已经传到自己首页,自己免费下载就成,只要换成自己采集到的数据就成,可以rosbag也可以是txt啥形式,自己改下就成
可以看下c++代码,是完全依赖磁力计,抗干扰能力奇差,所以实际落地会比较困难


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









