







一、线性规划模型及概念
规划问题的数学模型一般由三个因素构成 决策变量 目标函数 约束条件
数学规划是运筹学的一个重要分支,线性规划是数学规划的一个重要分支
线性规划即以线性函数为目标函数,线性条件为约束条件
建立线性规划模型的基本步骤
(1)分析问题,找出决策变量
(2)根据问题,找出决策变量必须满足的一组线性等式或者不等式约束,即为约束条件
(3)根据问题的目标,构造关于决策变量的一个线性函数,即为目标函数
二、线性规划模型求解及应用
1、基于求解器求解
标准形式如下
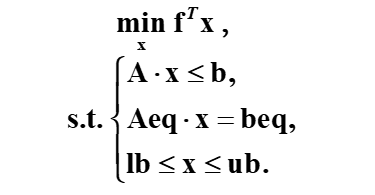
解法:
[x, fval, exitflag, output, lambda] = linprog(f, A, b, Aeq, beq, lb, ub, options)
其中,
输入参数:
f 为系数向量,表示目标函数系数,列向量;
A 为线性不等式约束矩阵,A 表示约束中的线性系数;
b 为线性不等式约束向量,b 表示约束中的常向量;
Aeq 为线性等式约束矩阵,beq 为线性等式约束向量;
lb 为下界,ub 为上界;
options 为 linprog 的选项
输出参数:
x 为解,fval 为目标函数最优值;
exitflag 为算法停止条件,output 为求解过程摘要,lambda 为解处的拉格朗日乘数
2、基于问题求解
首先需要用变量和表达式构造优化问题,然后用solve函数求解,详见例题
三、例题
求解下列线性规划问题

1、基于求解器求解
化为标准型

clc, clear, f = [-2; -3; 5];
a = [-2, 5, -1; 1, 3, 1]; b = [-10; 12];
aeq = [1, 1, 1]; beq = 7;
[x, y] = linprog(f, a, b, aeq, beq, zeros(3, 1));
x, y = -y %目标函数最大化
2、基于问题求解
clc, clear
prob = optimproblem('ObjectiveSense', 'max'); % 'ObjectiveSense'为优化的意义,默认求最小
x = optimvar('x', 3, 'LowerBound', 0); % name为变量名称,n为变量维度,cstr为索引名称,Type为变量类型,continuous(默认实数)或integer(整数),LowerBound为下界,UpperBound为上界
prob.Objective = 2 * x(1) + 3 * x(2) - 5 * x(3); % .Objective为目标函数
prob.Constraints.con1 = x(1) + x(2) + x(3) == 7; % .Constraints.con1为约束条件
prob.Constraints.con2 = 2 * x(1) - 5 * x(2) + x(3) >= 10;
prob.Constraints.con3 = x(1) + 3 * x(2) + x(3) <= 12;
[sol, fval, flag, out] = solve(prob), sol.x % sol.x为优化变量矩阵,fval为目标函数最优值
求得的最优解为 x1 = 6.4286, x2 = 0.5714, x3 = 0, 对应的最优值为 z = 14.5714
















 1860
1860











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











