







文章目录
写在前面:由于本博客机翻了大量术语且没有人工矫正,所以表达可能有问题。
摘要
由于距离遥远、轨道运动和恶劣的环境条件限制了点对点或端到端的通信,与深空要素的通信提出了重大挑战。中断/延迟容忍网络 (DTN) 是一种特殊的计算机网络体系结构,它克服了 TCP/IP 套件在满足间歇性端到端连接的深空网络要求方面的缺点。在 DTN 中,数据传输遵循存储结转方法,其中数据包(数据)作为中继节点之间的托管进行传输。这需要更复杂的路由策略,涉及额外的路由计算和网络资源消耗,但为不稳定的连接提供了更大的灵活性。本研究是基于 DTN 的深空通信背景下的最新文献综述。它涵盖了当前和未来深空通信系统架构的最新研究、深空通信的环境挑战、DTN架构的各种实现和演示,以及深空中继网络上相关路由策略的验证。此外,本综述还探讨了机器学习技术与 DTN 路由策略的集成,以及基于 DTN 的 DSN 中正在进行的研究方向和开放问题。研究最先进的文献表明,开发一种基于 n 副本的智能统一转发路由方案有望有效地融入深空通信,并在未来统一的星际互联网的不同部分之间实现最佳网络。
Introduction
20世纪下半叶至今,由于天文科学、应用科学和空间技术的融合,空间探索和导航取得了重大进展。这一发展促进了许多载人和无人太空探索任务的规划和执行,从而在银河系内外产生了广泛的发现。此外,人造卫星为人类提供的通信和多功能服务也取得了显着的进步。 CCSDS [1] 和 ITU [2] 将外层空间分为两类: 深空,距地球表面 2 × 106 km 以外,包括太阳系空间;近地空间,位于深空和地球表面之间。 CCSDS 利用这些分类将太空任务分类为“B”(表示深空任务)或“A”(表示近地太空任务)。
来自不同组织和国家的多个国际航天机构,包括 NASA、ESA、Roscosmos 和 JAXA,已经执行了许多 B 类深空探测任务。值得注意的是,目前的深空基础设施大部分是旨在成为星际互联网的未来基础设施,由上述机构设计、管理和维护。 2013年,14个航天机构联合成立了ISECG,其主要目标是制定全球探索路线图[3]。该路线图涵盖从国际空间站 [4] 开始一直延伸到月球、火星和其他天体的任务。这些探索任务凸显了建立可靠通信系统的必要性,该系统可以支持从航天器和外太空其他物体发送和接收数据。该系统对于监测深空至关重要,包括 NASA、ESA、Roscosmos 和 JAXA 在内的国家已经执行了许多 B 类深空探索任务。值得注意的是,目前的深空基础设施大部分旨在成为星际互联网的未来基础设施,由上述机构设计、管理和维护。 2013年,14个航天机构联合成立了ISECG,其主要目标是制定全球探索路线图[3]。该路线图涵盖从国际空间站 [4] 开始一直延伸到月球、火星和其他天体的任务。这些探索任务凸显了建立可靠通信系统的必要性,该系统可以支持从航天器和外太空其他物体发送和接收数据。该系统对于监测其性能并将科学数据传输回地球至关重要。
近几十年来,深空通信系统 (DSN) 取得了显着进步,其复杂性不断提高,能力也得到提高。这些进步带来了更快的传输速度和更高的数据速率。然而,鉴于 DSN 的环境条件,出现了一些关键的通信问题。这些包括高且可变的延迟、不可靠的间歇性分布式端到端连接,以及地面站和具有系统或随机运动的深空元素之间的天文距离。传统的地面互联网范式无法有效地管理这些问题,因为它依赖于不适用于这种情况的假设和设计原则。
延迟容忍网络 (DTN) [12,13] 是一种网络技术,设计用于在端到端连接不始终可用且长时间且可变延迟很常见的环境中运行。 DTN 通过创新方法证明了其有效性,这些方法确保了在自然灾害等具有挑战性的地面通信场景中的连接性[143-145]。此外,DTN已成功应用于深空通信,展示了其作为最佳解决方案的能力[15,16]。即使在连接中断的情况下,它也能实现可靠、高效的长距离数据传输,并具有类似于互联网的自动化功能。在深空通信中采用 DTN 的主要动机是促进太空和地面部分之间可靠且高效的数据传输。
通过利用 DTN,空间元件即使在超出范围或位于信号强度有限的区域时也可以保持与地面站的连接。此外,DTN 允许本地数据存储,直到可以将其传送到预定目的地,从而优化有限带宽资源的利用。因此,即使在最极端的环境下,它也能实现更高效的自动化任务操作和远程位置数据收集。将DTN融入未来一体化深空网络,将建立可靠、高效的统一星际通信系统,为实现统一星际互联网迈出重要一步。
由于将 DTN 技术融入深空通信对于建立强大而有效的网络互联系统具有重要意义,因此已经提出了多项研究来解决基于 DTN 的 DSN 中应实施的环境挑战、结构、标准、路由方法和主要技术。 。因此,我们进行了这项研究,通过检查最近的出版物并确定关键方法、开放问题和研究方向,全面概述该研究领域的最新进展。此外,我们的目标是提供一个全面的指南来总结这些发现,并提供基于 DTN 的 DSN 网络所取得的进展的最新概述。
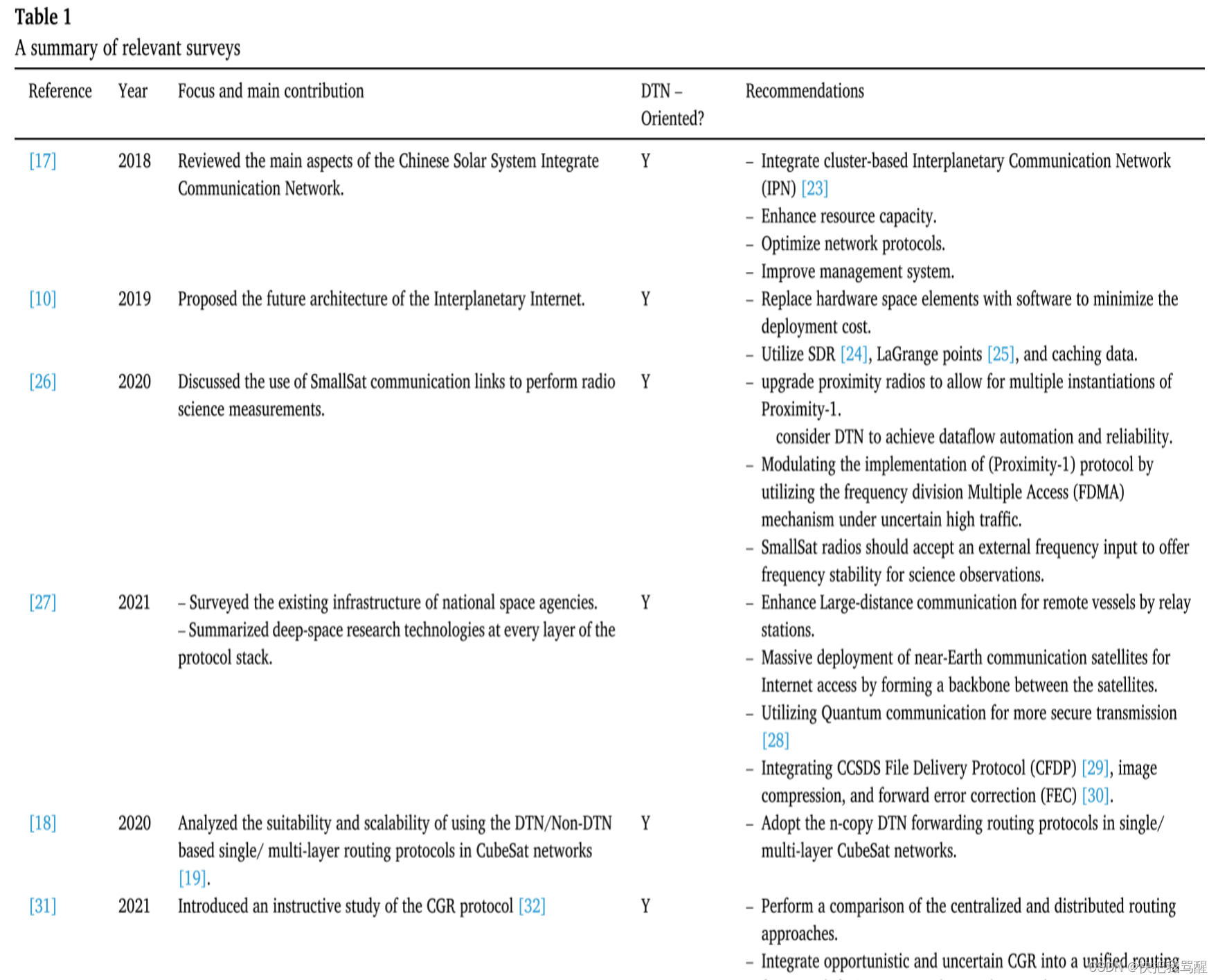
已经对空间通信进行了多项调查。例如,[17,10]讨论了未来星际互联网架构的架构,而[18]分析了在CubeSat网络中使用基于DTN/非DTN的单/多层路由协议的适用性和可扩展性[19]。此外,[20,21]通过分别依赖于实时虚拟测试台和模拟工具的两个实验评估了深空通信的有效性[22]。表 1 总结了我们研究主题的最新相关评论,以及他们对有效空间通信系统的建议。然而,与之前的调查相比,我们最新的研究通过全面解决与基于 DTN 的 DSN 相关的各种研究方向而脱颖而出。
这项工作的主要贡献如下:
- 回顾了深空和延迟容忍网络架构的最新进展,以及集成DTN在深空通信场景中的成功演示。
- 总结了可能影响深空网络系统整体性能的基于环境的路由和通信挑战。
- 重点介绍、分类并展示了专为地球轨道外联网而设计的 DTN 路由策略的重要研究成果。
- 研究将机器学习技术集成到基于 DTN 网络技术的深空通信场景中的潜力。
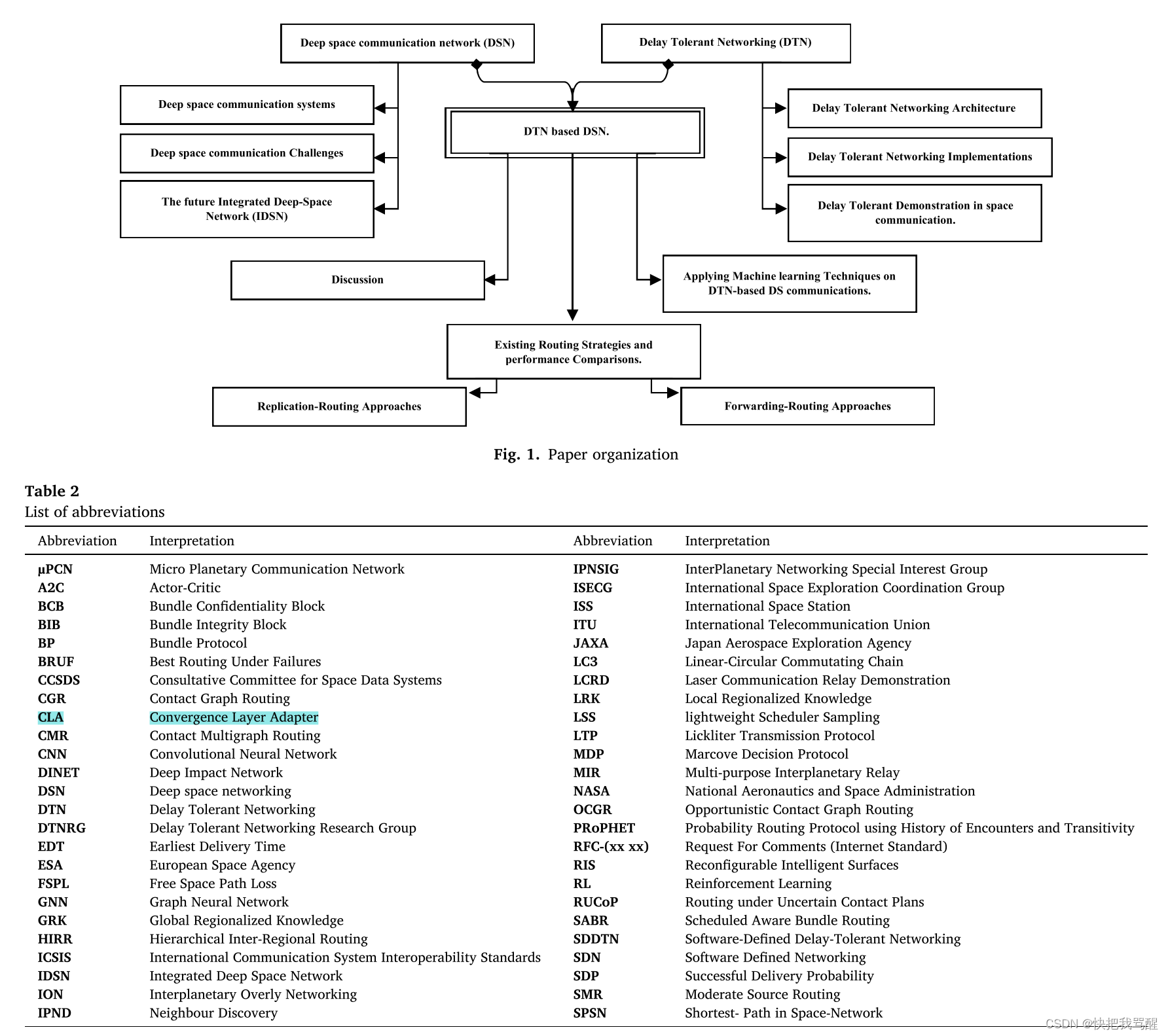
本研究的分类和组织(包括主要组成部分)如图 1 所示。此外,本研究中使用的术语缩写列于表 2 中。本文的其余部分组织如下:第 2 节,概述了当前的深空通信系统、其通信特征和能力、未来的综合深空网络以及破坏深空通信的环境挑战。第3节讨论了延迟容忍网络技术的架构和现有的DTN实现,并总结了DTN在深空环境中的成功演示。第 4 节介绍了当前基于 DTN 的 DSN 路由策略的分类和性能简要调查。第 5 节研究了在基于深空通信场景的 DTN 架构中利用机器学习技术的影响。第 6 节定义了该领域的开放挑战和研究。第七节得出结论和展望。
深空网络概述
深空科学任务涉及软着陆、地球返回和行星漫游器探索,包括发射轨道器、航天器和漫游器作为中继节点,其根本目的是更好地了解特定行星的性质,因此需要相应的信息大量科学数据成功返回地球。这需要互操作性空间通信系统的支持,该系统在地面控制中心和空间实体、科学家及其远程仪器之间提供可靠、灵活、透明、高带宽、可扩展和有效的连接。它还允许通过传统的互联网界面向公众进行任务跟踪。
当前的深空通信系统
近几十年来,深空通信系统取得了显着进步,其复杂性不断提高,能力也得到提高。这些进步带来了更快的传输速度和更高的数据速率。深空通信需要专门的天线、接收器、发射器和其他可以长距离运行且信号损失最小的设备。深空任务的通信是通过配备特殊深空天线的全连接地面站来实现的,这些天线既可以作为超灵敏的数据接收器,又可以作为强大的数据发射器,形成深空通信的地面骨干网络。这些空间设施分布在地球周围,从而获得了深空的全覆盖,从而保证了包括行星际航天器和地球轨道飞行器在内的不同空间要素的连续跟踪。此外,还使用专门的编码技术来确保数据在长距离上准确可靠地传输[34-37]。
除了强大的天线之外,最初,深空任务还依赖于数据传输能力有限的低带宽无线电链路,仅支持基本命令和遥测数据。然而,随着激光通信和Ka波段无线电系统等新技术的引入,DSN取得了显着的进步。与传统无线电系统相比,激光通信系统提供更高的带宽。这可以实现更快的数据传输速率并促进更复杂的任务操作[5,6]。另一方面,Ka 频段无线电系统也提供更高的带宽,但需要比激光通信系统更大的天线和更大的功率 [7,36]。值得一提的是,NASA 目前正在开发一种新的激光通信系统,称为激光通信中继演示(LCRD)[8]。该系统预计将提供高达当前 DSN 10 倍的数据速率。
此外,深空通信上行链路和下行链路能力是指从位于深空的航天器发送和接收数据的能力[35]。这种能力对于探索太阳系及其他星系至关重要。上行链路能力允许向位于深空的航天器发送命令、数据和其他信息。下行链路能力使我们能够从这些航天器接收数据,例如图像、遥测和其他科学信息。此外,通用通信依赖于地面站和空间要素之间的直接连接,通过中继卫星作为源节点和目的节点之间的中间节点,以确保数据的全时交换。
此外,自主星载导航[38]是深空通信的一项主要功能,因为它允许航天器在不依赖地面导航系统的情况下在太空中导航;它依靠传感器、计算机和软件的组合来确定航天器在太空中的位置和轨迹。星跟踪器、陀螺仪和加速计等传感器用于测量航天器相对于其环境的方向[39,41]。计算机用于处理这些数据并计算航天器的位置和轨迹。除了软件策略[40]之外,它们还用于控制航天器的姿态和速度以保持其所需的航向。自主车载导航系统还包括射频(RF)通信、光通信和激光通信。通过将前面提到的功能与自主导航功能相结合,深空通信系统可以实现传统地面导航系统不可能或不切实际的探索任务。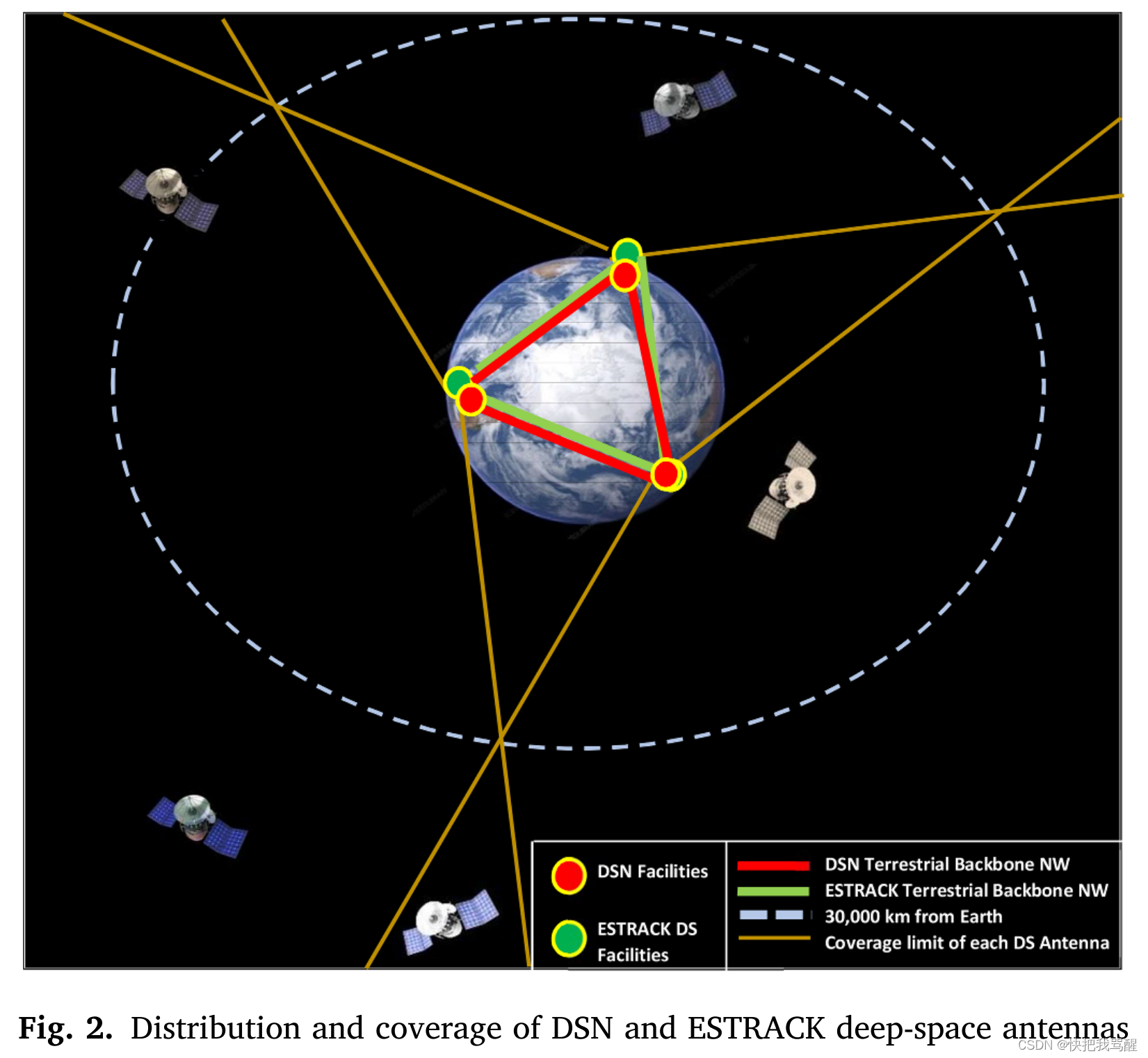
NASA的深空通信网络(DSN)如图2所示,由三个相距120°分布的深空设施组成,分别位于美国、西班牙和澳大利亚。 DSN 被认为是世界上最敏感的科学电信系统,由空间通信和导航 (SCaN) 中心运营,以支持 NASA 和非 NASA 的行星际太阳系探索任务 [42]。 SCaN 计划开发和维护深空基础设施,该基础设施可以轻松地逐步适应新兴技术,同时提供强大、可靠且数据速率极高的空间通信、跟踪和导航服务。 DSN 能够以高达每秒 8 兆位 (Mbps) 的速率发送和接收数据。这使得高分辨率图像、视频和其他数据可以从航天器发送到地球。 DSN 还可以向航天器发送命令,从而远程控制航天器的操作。此外,DSN 还可以利用无线电信号跟踪深空航天器的位置。 DSN 是 NASA 任务运行的重要组成部分,因为它允许地球与深空航天器之间进行通信。没有它,美国宇航局的许多任务都将无法实现。
同样,由 ESA 管理的 ES-TRACK 核心网络由七个空间设施组成,其中三个配备了 35 米长的深空天线(DSA)[43],专门用于控制、跟踪、并支持深空任务。 ES-TRACK网络具有多种通信功能,包括发送和接收航天器数据的能力,以及跟踪其位置和轨迹的能力。该网络还可用于任务控制和航天器之间的双向语音通信。此外,ES-TRACK 可用于遥测,即将有关航天器性能的数据传输回任务控制中心。 ES-TRACK网络还可以向航天器发送命令,使任务控制器能够调整其轨迹或激活机载系统。这种能力对于需要在特定时间进行精确机动和特定操作的任务尤其重要[44]。
欧空局深空网络 (ES-TRACK) 提供广泛的通信功能,使任务控制人员即使在数百万公里之外也能与航天器保持联系。 ES-TRACK网络还能够提供航天器的实时跟踪和控制,从而实现深空精确导航。这种能力是由其高精度跟踪系统提供的,该系统结合雷达、光学和射频技术来精确跟踪航天器的位置。此外,ESTRACK 网络还提供地面站和航天器之间的安全通信链路。这确保了通过网络传输的所有数据都受到保护,免受未经授权的访问或操纵。欧空局的深空运行中心还致力于开发新技术,例如飞行动力学技术和新型卫星控制系统[45]。此外,欧空局与其他航天机构签署了许多资源共享协议,以利用其跟踪服务,以换取共享 ES-TRACK 的能力。
最后,美国宇航局、欧空局等大型航天组织正在不断开发通信基础设施,以实现深空的全覆盖,从而保持地球和太空要素之间的持续联系。下一步将是合并所有这些基础设施,形成一个综合空间通信网络,从而保证任何地面终端节点与位于或绕任何其他行星运行的对应终端节点之间的连接,作为进入这个时代的开始星际互联网的发展,地面和太空通信之间的区别变得透明。
未来综合深空中继通信网
DSN 的未来扩展是综合深空网络(IDSN)[9,10],这是一个跨越太阳系和宇宙的通信网络系统。它由多个网络组成,包括光学、射频 (RF) 和激光通信,通过网关和中继节点连接。这构成了统一的星际互联网(IPN)的基础设施[10, 11]。 IDSN 旨在提供可靠、安全的通信,以及具有挑战性的异构行星互联网之间的互操作性,以形成统一的星际互联网基础设施。它的设计必须能够承受太阳耀斑或其他太空天气事件造成的干扰。
此外,IDSN 应该能够在长距离和间歇性连接上有效地传输大量数据。为了确保安全可靠的通信,IDSN 将得到强大的管理系统的支持。它还利用特殊的协议栈在 IDSN 中的所有参与者之间成功、高效地进行数据路由。未来IDSN通信系统的架构首先在[9]中提出,它由一个深空骨干网络和多个行星网络组成,旨在合并和集成形成深空网络。如图3所示。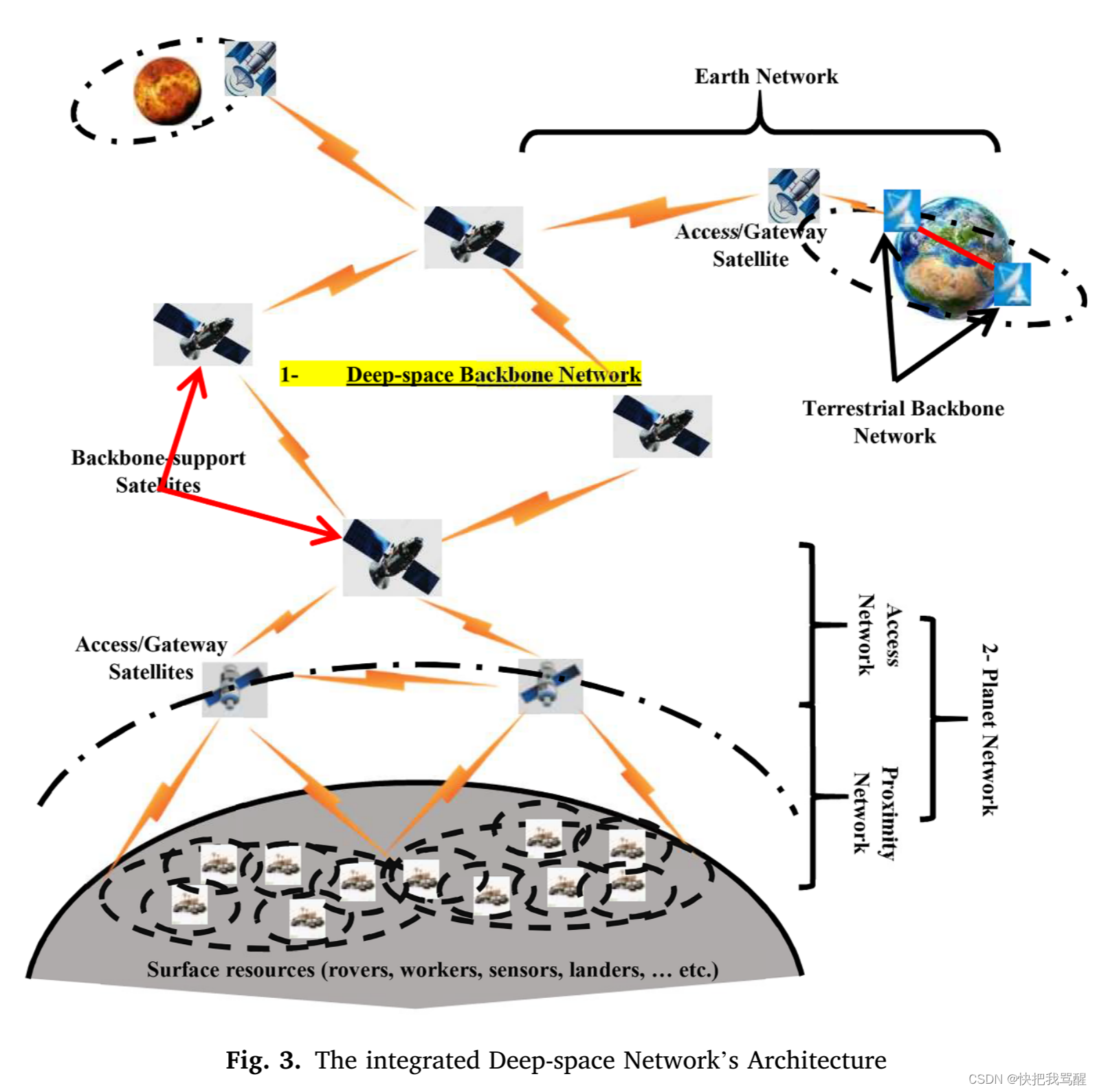
首先,深空骨干网络应促进地球、行星和太空人造元件之间的通信。这将通过一系列充当中继器或通信中继节点的人造卫星来实现。这些中继节点将通过提供高可靠性和可用性的宽带宽链路连接。它们将拥有高效的指向集合、指向、捕获和跟踪能力,以及强大的处理能力,可以在发生障碍物或拥堵时计算替代路线。该网络将不再依赖源节点和目标节点之间的点对点连接,而是通过中间骨干支持中继节点利用多跳连接。这种方法确保了太阳系内任何源-目的地对等点之间数据的连续流动[46]。与地面互联网中的路由器网状网络类似,连接的中间中继节点网格将构成 DSN 的主干。该网格将通过专门的路由协议(例如具有缓冲和转发方法的 CCSDS [47] 或 DTN [13] 协议栈)得到增强(参见第 4 节)。这些协议将提供端到端连接,同时解决深空通信网络面临的具体挑战和问题。
其次,行星网络分为接入网和地面网。地面网络(邻近网络)提供地面实体(例如车辆、流动站、着陆器、传感器等)之间的连接,这些实体也可以与网关中继卫星(接入网络)进行通信。此外,它还由无法与骨干深空中继卫星直接通信的地面实体形成地面骨干网络。接入网络(通信网关接口)包括一组围绕给定行星运行的 Astro 固定和低行星轨道中继卫星;这些卫星除了连接地表网络的两个或多个部分之外,还将行星地表网络与深空主干网络连接起来。
基于先前建议的架构,DSN 的拓扑设计已成为一个流行的研究领域。在[48]中,作者提出了用于地球和火星之间持续、宽带深空通信的 LC3 架构。该设计利用一组日心轨道上的 (MIR) 卫星节点来克服由地球-太阳-火星几何形状引起的掩星问题。目标是通过高数据速率传输和低延迟实现地球和火星之间的连续连接。然而,该提案的一个缺点是缺乏全面的设计理念和详细的网络性能分析。
此外,[49]中的作者提出了另一种基于恒定人工拉格朗日点(L4和L5)的拓扑设计[50]。图4说明了如何将L4和L5视为地球-火星通信场景中深空骨干中继卫星的最佳位置。虽然这种拓扑设计在最小总吞吐量和最小日联系周期等约束下实现了通信链路的最大吞吐量,但需要注意的是,性能评估是在没有考虑链路吞吐量模型、联系序列时间、以及中继卫星的内部存储。
此外,[49]中的作者提出了另一种基于恒定人工拉格朗日点(L4和L5)的拓扑设计[50]。图4说明了如何将L4和L5视为地球-火星通信场景中深空骨干中继卫星的最佳位置。虽然这种拓扑设计在最小总吞吐量和最小日联系周期等约束下实现了通信链路的最大吞吐量,但需要注意的是,性能评估是在没有考虑链路吞吐量模型、联系序列时间、以及中继卫星的内部存储。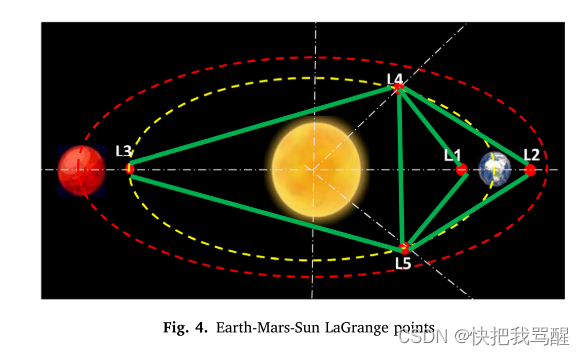
DSN Communication Challenges
深空环境中的通信依赖于随机或系统运动的稀疏空间元素之间的点对点连接,提出了几个已被调查并分类为节点、链路、网络和操作级别的问题[52]。值得注意的是,如图 5 所示,由于拥塞和障碍、通信范围不同、错误率高、行星一侧缺乏固定基础设施、链路容量不对称以及可嵌入有效负载的资源有限(例如电力、存储),导致间歇性连接、处理、通信硬件和协议设计)是关键挑战。重要的是要考虑到太空飞行只能在特定的日子进行,这些日子与成功向预定行星发射任务的理想结合相一致[52,10和27]。此外,深空通信受到通信节点之间的天文距离和光速的限制。这些因素影响深空通信的速度并导致传播延迟增加。此外,长距离的数据传输会降低数据质量并扭曲消息。
此外,太阳闪烁和天体辐射与通信质量重叠[53],导致任务运营中心使用先进的计算机策略将中断的传输转换为可用数据。如前所述,基于视线的光空间通信[57]是消除无线电波电磁干扰的最有效解决方案。然而,天文距离上的两个节点之间的光通信可能会被太阳或其他行星等物体长时间阻碍。此外,深空通信信号由于自由空间路径损耗(FSPL)而衰减[54],并且随着天文距离的增加而放大。这种复杂的环境以高丢包、长往返延迟和分布式链路为特征,无法提供可靠的连接,并且由于身份验证、授权和加密要求而消耗带宽[55]。尽管高性能硬件和计算能力有限,深空网络中的节点(例如卫星或近行星平台)仍难以适应经典的密钥管理策略[56],例如集中式、分布式、基于拓扑和由于网络的异构性,需要采用预配置密钥管理技术。
在安全可靠连接方面,间歇性长往返时延TCP解决了其传输控制算法与深空网络复杂特性之间的冲突而导致性能下降的问题。
TCP 的另一个问题是它无法区分网络拥塞引起的数据丢失和天文物体移动造成的通信中断导致的链路中断,从而导致大量数据包丢失和重传 [58]。此外,深空信道具有不对称带宽点对点链路,下行链路具有比上行链路更高的带宽。这会影响 TCP 的性能,因为它依赖于通过低速率上行链路及时确认来进行数据传输 [58]。总之,深空网络由于这些问题而面临挑战,导致在没有足够基础设施的情况下在对等端点之间建立和维持持续可靠的连接变得困难。
3 Delay/ Disruption Tolerant Networking (DTN)
3.1 DTN Architecture
DTN 在[12]中首次被引入,作为一种覆盖网络技术和协议套件,其开发目的是与互联网架构集成,以应对具有挑战性的行星条件下的外层空间网络互联的要求,包括空间元素的异质性和长间歇性失去连接。 DTN保证异构DTN节点之间的互操作性;通过在指定的应用程序和传输层之间放置一个标准的“捆绑层”,从而允许每个 DTN 节点使用其最适合的协议栈来应对其具有挑战性的环境。除了在长时间且可变的延迟下保持端到端连接之外,还利用存储结转方法。
RFC-4838 [62] encom 中定义的 DTN 架构传递了各种组件,例如节点、捆绑、托管传输机制、路由策略和应用程序接口。它定义了这些元素如何交互以在延迟容忍网络中实现高效通信。下面简单讨论DTN架构的这些突出特点:
3.1.1 Overlaying
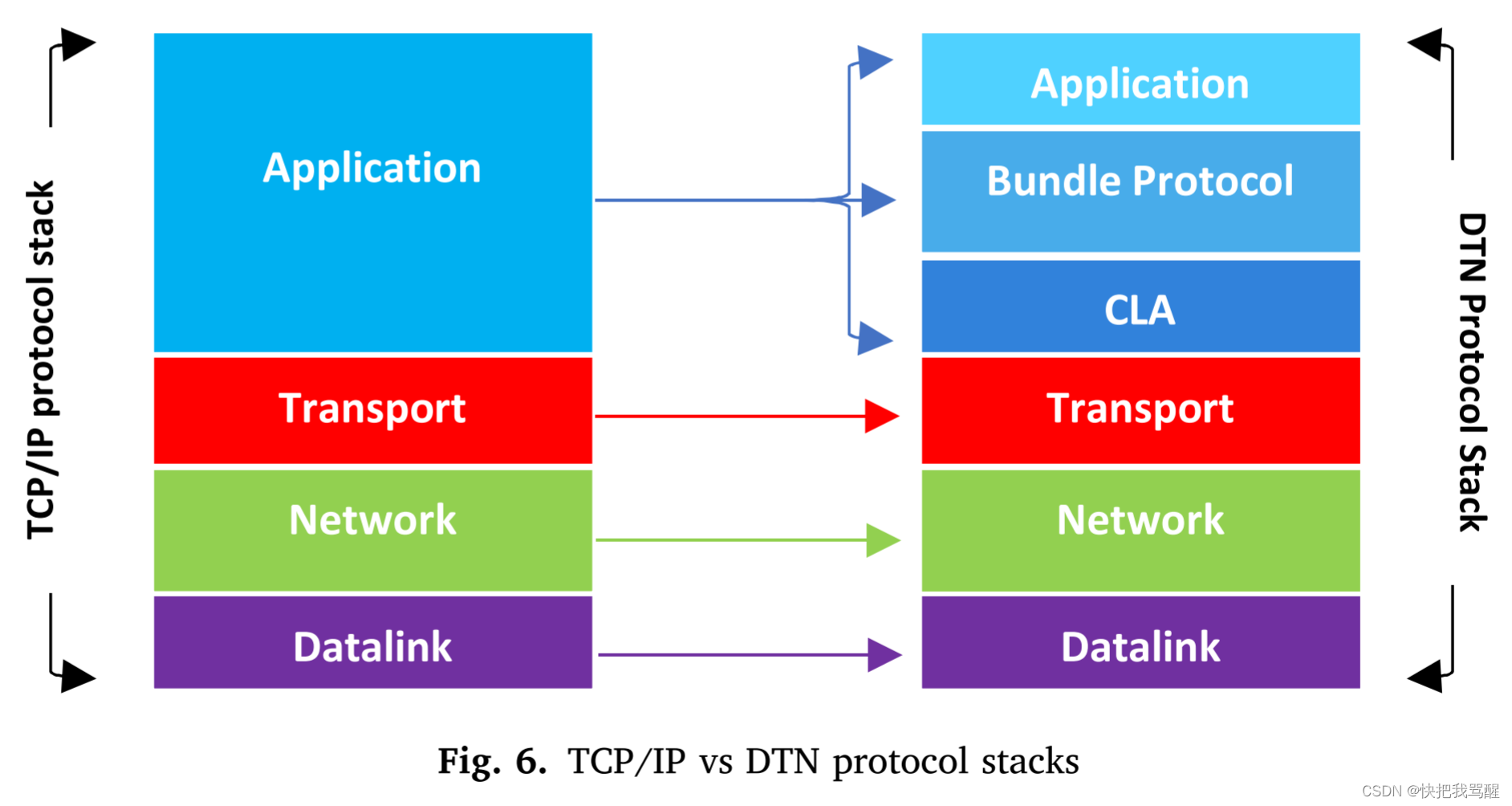
从DTN的角度来看,从源DTN节点到目的地的路径将被分成具有不同协议栈的多个DTN跳;其中之一可以是标准互联网协议栈,如图 9 所示。(DTN 节点 (1))。这可以通过在每个源和目标对及其中间节点协议栈的顶部安装捆绑协议来实现,该协议可以通过其最适合的汇聚层(CL)与不同的较低层进行交互。图 6 描述了 TCP/IP 和 DTN 协议栈之间的差异。
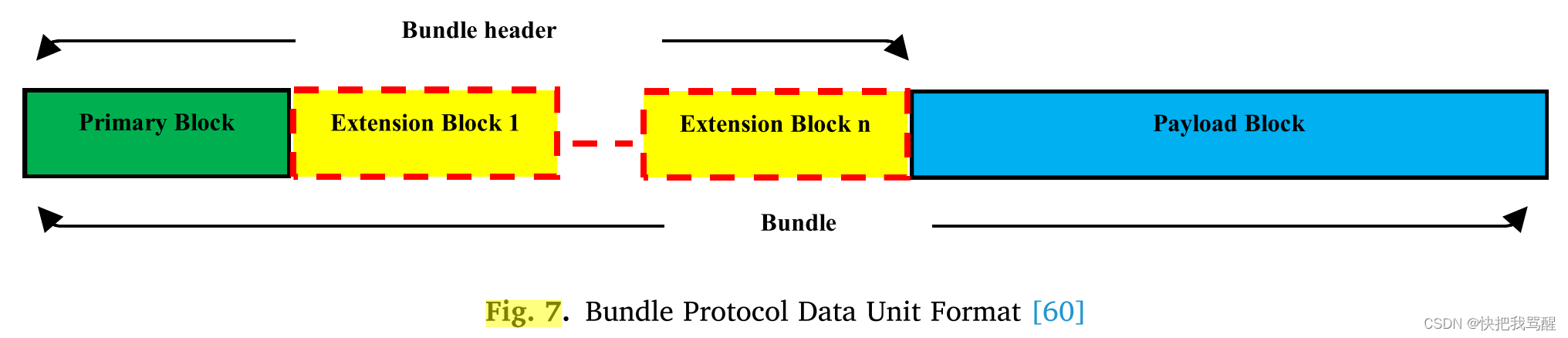
为了在延迟容忍网络中建立算法和应用程序开发的通用框架,在 RFC5050 [60] 规范中引入了 BP 作为 DTN 网络中的核心协议。捆绑包被定义为与标准 IP 数据包不同的可变长度协议数据单元,因为它们没有维度限制,可以减少两个 DTN 跳之间交换的消息数量,从而在与深空相关的长时间延迟条件下完成特定事务链接,这可能是几个小时甚至更长。如图 7 所示,每个捆绑格式由一系列块组成,除了包含实际传输数据的有效负载块之外,至少有一个主块保存有关其源/目标节点、创建/到期时间和大小的处理信息。除主块和有效负载块之外的其他块称为“扩展块”[60]。这种覆盖网络架构引入了基于端点标识符(EID)的新命名系统,并提供了粗粒度的服务选项。
BP 旨在促进 DTN 网络内的数据传输,它依赖于 CLA [62],CLA 充当 Bundle 层和传输层之间的接口,允许 Bundle 通过异构端到端的不同段进行传输和接收小路。目前的CLA包括TCP-CLA、UDP-CLA和LTP-CLA,其中到达目的地的路径上的每个DTN节点可以部署不同的CLA适配器[6],以实现到下一跳DTN节点的可靠捆绑传输。所选择的 CLA 根据与输出队列相对应的所使用的传输层来封装每个包。因此,运输概念被重新定义。它不是端到端传输,而是仅限于使用不同传输层协议(例如 LTP 或 TCP)或同一协议的变体版本(例如 TCP 变体)的单个 DTN 跃点[59]。这使得深空链路中的专用传输协议能够补偿不同跳中的异构链路挑战。
说到 RFC 规范,RFC-4838 [62]定义了 DTN 的体系结构,并为设计和实现延迟容忍网络提供了概念框架。它概述了在具有挑战性的网络环境中进行可靠通信所需的基本原理、组件和行为。 RFC-5050 (BPv6) [60] 最初引入 BP 作为 DTN 网络中捆绑创建、寻址方案、路由策略、托管转移机制和安全考虑的综合规范。随后,RFC-9171 (BPv7) [79] 作为更新发布,以解决限制并根据从早期版本获得的实际经验提供附加功能。它包括对 RFC-5050 的一些更改,例如传输和转发的澄清、“节点 ID”概念的引入、新扩展块的定义(Bundle Age、Previous Node 和 Hop Count)以及时间值的澄清面值。
此外,从一开始,DTN 的发明就考虑到了安全性(RFC 9172 [61])。捆绑安全性不是一个独立的协议层。它是一种直接构建到 BP 中的机制,利用 BIB 来检测对数据块的任何操作,通过用符号标记每个包的块。主块上的 BIB(保存源节点标识符)验证捆绑包的真实性。此外,BCB 还会对除主块之外的捆绑包中的其他块进行加密,从而防止流量被分析。可以对有效负载块进行加密以保护其内容,而包含有关有效负载的相关数据的扩展块可以进行真实性签名但未加密,以提供访问有效负载相关数据但不访问有效负载本身的路径点,见图8。
3.1.2 Fragmentation and Reassembly
在 DTN 中,DTN 节点之间的间歇性连接时机由传输机会(即联系)的间隔来表示,这些机会被分类为计划的、预测的(不确定的)和机会性的(非计划的)联系,其中每个联系的特征在于其源节点和目标节点、开始时间、结束时间以及取决于数据传输速率和联系持续时间的联系量。转发包的分片和重组过程是在DTN架构中设计的,以确保联系卷的充分利用[62],从而最大化特定联系期间传输的数据量并最小化重传次数。分片是将大尺寸的束分解成更小尺寸的分片单元的过程,可分为主动式分片和反应式分片。
主动分段专用于具有预定义持续时间和容量的预定联系,其中每个分段单元作为单独的捆绑包转发,而原始捆绑包的重组过程仅由目标节点负责。另一方面,当沿到目的地的路径上的两个 DTN 节点之间的特定接触中出现计划外中断时,就会发生反应性碎片,从而导致数据碎片和数据包的部分传输。这里,重组责任被授予目的地节点以及中间节点。由于与托管传输机制和数字签名的冲突,许多 DTN 实现可能会忽略反应性碎片,因为加密消息的部分传输会阻碍其身份验证数字签名。因此,在启用 DTN 安全性的情况下,应主动对大消息进行分段 [61,63]。
3.1.3 Store-carry-forward approach
在 DSN 的环境中,延迟较长且可变且缺乏合适的联系人,因此有必要在通往所需目的地的路径上的每个 DTN 中继节点上具有存储功能。 Bundle Layer 中使用的 Bundle Pro tocol (BP) 通过维护内部存储来支持存储结转方法。这允许每个 DTN 节点在本地保存每个数据段(捆绑)很长一段时间(可能是几个小时),直到具有足够带宽的下一跳中继节点的联系链路可用。
托管节点负责成功交付当前托管包。此公告允许先前的 DTN 节点从其本地存储中删除其捆绑包的副本 [12]。此过程可确保数据包的可靠传输而不会造成任何丢失,特别是当发送方的内存和电力资源有限或发生临时节点故障时。如果所有跳都使用可靠的汇聚层,则不需要捆绑包重传,除非捆绑包在中间节点内被丢弃。
在单个 DTN 跃点内报告较低层的丢失,以防止从源端点 DTNnode 进行不必要的捆绑重传。此外,DTN 架构中的 BP 实现具有独特的特性,可以通过状态报告跟踪捆绑包。这些报告由 DTN 节点代理生成,并提供有关每个包的传输状态的信息,包括是否已转发、接收、交付、删除或保管。
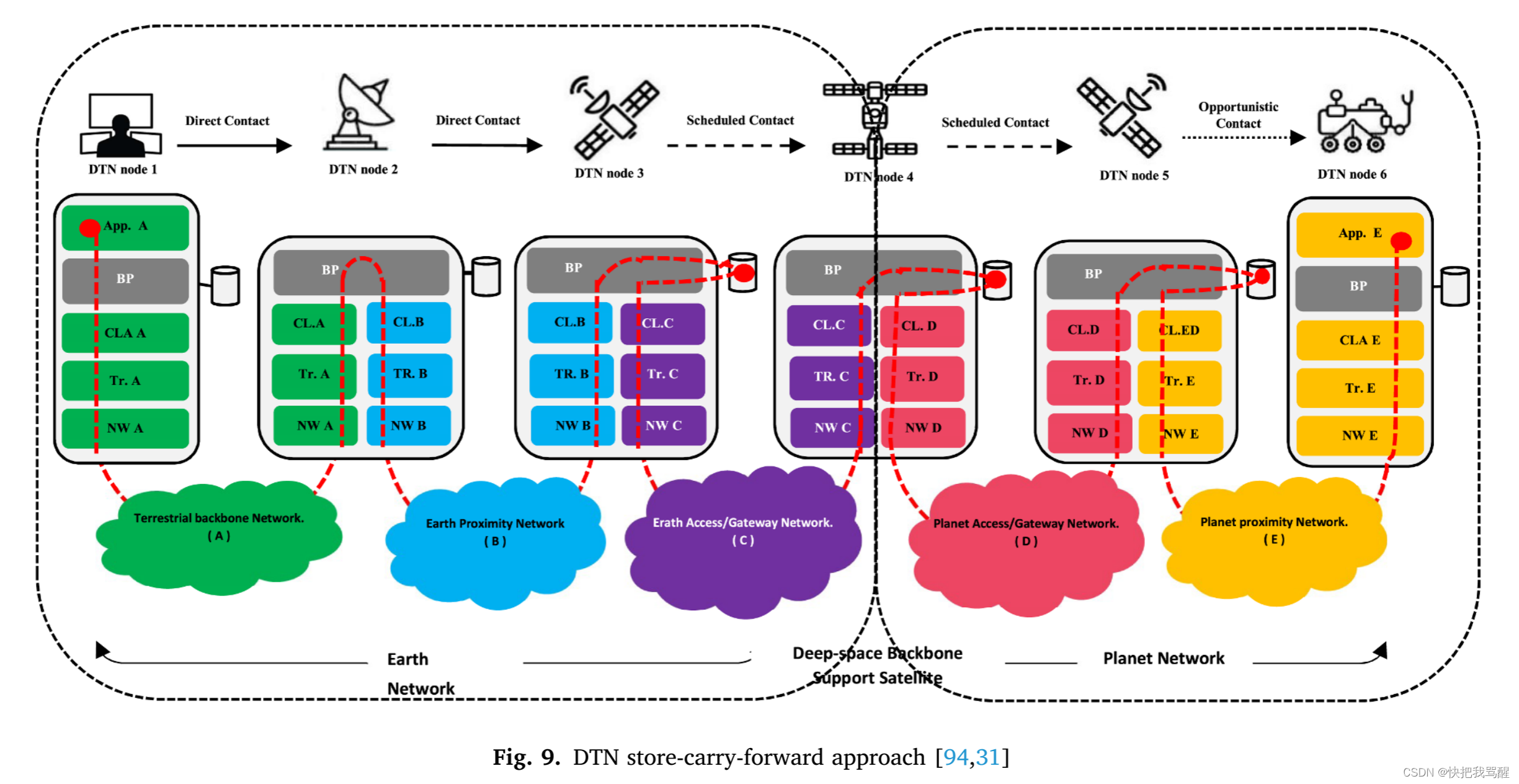
图9描绘了一个深空中继网络,包括六个具有不同协议栈和不同触点的DTN节点。该网络是在深空中继网络中利用存储结转方法的示例。源节点是位于地球上的任务控制中心(DTN 节点 1),旨在向其目标节点(位于另一个行星表面的漫游器(DTN 节点 6)以随机运动模式发送命令)。虽然源节点和目标节点之间没有直接联系,但四个中继 DTN 节点可以充当传输包的中转站。这些中继节点利用不同的协议栈和联系类型。由于任务控制中心通过地面骨干网与地面站直接联系,因此数据包可以直接传输,没有任何延迟。
Node-3 是一颗 GEO 卫星,与地球自转同步运行。它充当地球网络的网关,并确保与其跟踪地面站的持续联系。因此,它提供了另一个直接联系,而无需浪费时间等待通过此跃点的合适联系。另一方面,节点4是一颗中继深空骨干支持卫星,具有可预测和系统的移动模式。因此,DTN 节点 3 必须在本地存储传输中的捆绑包,直到它安排与节点 4 的联系。一旦建立此联系,DTN 节点 4 就负责将包传送到节点 5。 Node-5 是一颗围绕目标行星运行的天文静止卫星,充当行星网络的接入点。在发生允许在节点 4 和节点 5 之间成功传输数据包的预定联系后,此时节点 5 负责将数据包传送到目的地,根据其不可预测的运动和中断的环境,节点 5 负责将数据包传送到目的地。没有与节点 4 进行预定联系。因此,该捆绑包将存储在节点 5 中,直到节点 6 进入节点 5 的通信范围足够长的时间,以授权通过此机会性联系成功传输。
摘要:基于前面的示例,具有不同协议栈的异构 DTN 空间元素(在高度中断的互联网络中形成从源 DTN 节点到目标 DTN 节点的路径)可以通过各种联系人相互通信。然而,深空环境中的DTN组网仍然被认为是一个与许多路由问题直接相关的困境。
3.2 DTN Implementations
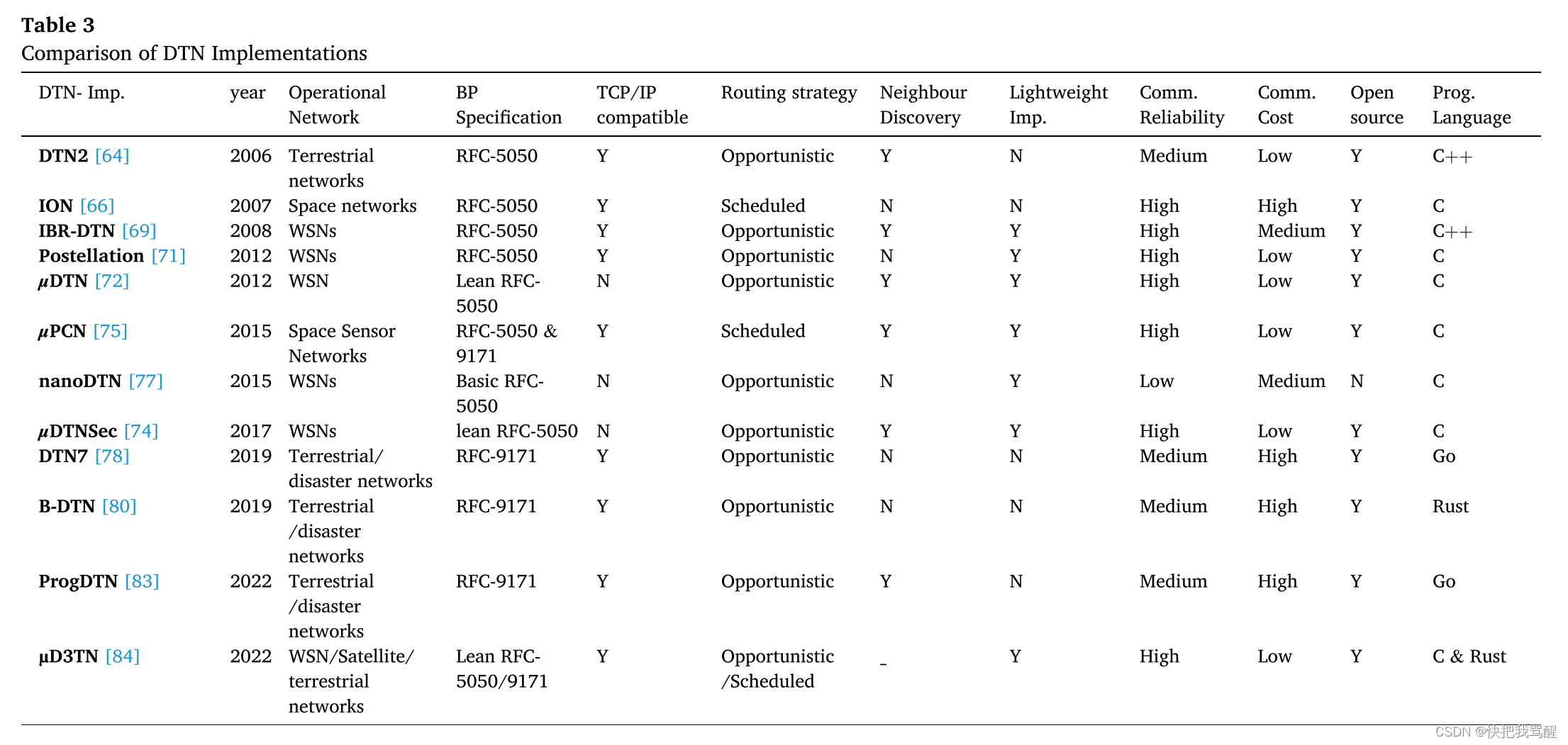
BP 架构有许多成熟的实现。这些实现充当模拟 DTN 架构的分层和存储结转方法的实验平台。他们还提供各种 CLA 来评估 DTN 协议在不同网络环境中的性能。表3对现有基于BP的DTN实现架构进行了全面的总结和比较。
DTN2 [64] 代表了由 DTN 研究组 (DTNRG) [65] 开发的 RFC-5050 [60] 实验规范 DTN 的实现。 DTN2 采用 C++ 和 TCL 编写,带有一个控制台模块,该模块提供用于管理和配置的命令行界面。 DTN2是在DTN的基本实现的基础上开发的,旨在应对低密度地区地面网络接入受限的问题,放弃性能优化和资源管理,广泛使用通过XML接口附加的外部库。除了存储结转和邻域发现技术之外,DTN2 还支持 TCP、UDP 和蓝牙汇聚层,并具有可通过 XML 接口附加的存储和路由方案扩展。 DTN2 还帮助捆绑安全协议为捆绑转发提供身份验证和完整性保护。捆绑包可以通过 (IP) 传输层或各种链路层(例如以太网和蓝牙)发送。因此,DNT2 可以有效地部署在地面应用中,除了不适合嵌入式系统平台的成本和能源限制之外,还没有外部库使用的限制。
ION [66] 是 DTN 的一种实现,旨在集成到深空任务飞行软件中,用 C 语言编写,并与 DTN2 实现互操作,但具有不同的寻址方案。 ION 由 NASA 喷气推进实验室(JPL)实施[67],目前仍在持续开发中。它已经在多种场景下进行了评估和验证,并移植到GNU/Linux、Solaris、Android、Windows等不同平台以及VxWorks、RTEMS等实时操作系统。 ION 支持 DTN 的核心功能,例如贸易交接、状态报告、流量控制、片段重组和拥塞控制。它还支持具有预定调度通信联系的CGR[32],这消除了采用发现机制的需要,然而,最近版本[68]中包含的机会性CGR将提高其节点发现的能力。然而,太空飞行软件需要在不同的环境限制下进行复杂的开发,需要有意识地平衡利用处理和存储资源以及传输机会。
IBR-DTN [69] 是 BP 包的标准可通信轻量级实现,专用于资源极其有限的嵌入式系统平台,具有最小的 RAM、内存占用和资源消耗。它是用 C++ 编写的,由布伦瑞克技术大学开发,并且已经在不同的操作系统上进行了测试和移植。 IBR-DTN 与 DTN2 互操作并实现 TCP/IP、UDP、HTTP 和 IEEE 802.15.4 (LoWPAN) 汇聚层。它支持邻居发现机制、捆绑转发和流行路由算法[70]。 IBR-DTN 的主要目标是尽可能减少库等外部依赖项的使用,并考虑到将 IBR-DTN 轻松移植到新平台需要少量的依赖项。此外,IBR-DTN 是一个事件驱动的系统,可以通过新邻居的发现、链路丢失、捆绑包接收和传输或其他事件来激发,这些事件触发代表 IBR-DTN 功能的松散耦合模块的同时执行。因此,IBR-DTN 可以在编译时适应所选平台的功能。因此,如果某些功能依赖于外部库,则该依赖必然与选修模块相关。
Postellation [71] 是另一种用 C 语言编写的便携式轻量级 BP 实现,具有额外部署的互联网功能,例如高级 HTTP 和视频流功能,可以以最小的 DTN 成本有效地移植到嵌入式系统。 Postellation提供了不同的汇聚层,例如TCP、UDP和TCP-TLS,但是它不支持邻居发现机制。它已被移植到不同的平台,例如GNU/Linux、不同的基于BSD的系统、MacOSX和Windows。
µDTN [72] µDTN 是 RFC-5050 捆绑协议的微控制器兼容精益实现,专用于无线传感器网络,具有许多设计考虑因素,以使其能够在(特别是)具有硬件和能源限制的 CubeSat 应用下运行。由于无线传感器节点的实现资源有限,并且为了更好的性能和代码效率,有必要忽略标准BP的很多规范,例如对各种汇聚层的支持。 μDTN 被设计为建立在 MAC 层之上,并且仅利用 IEEE 802.15.4 汇聚层。它主要是为运行 Contiki OS2 的 8 位微控制器开发的,除了与 Linux 上运行的其他 BP 实现具有互操作性之外,还可以方便地使用 Contiki 协议栈 [73]。 μDTNSec [74] 是 μDTN 的扩展实现,作为微控制器上 DTN 实现的安全层,可保护通信免受中间人攻击。由于 DTN 的体系结构,沿着到达目的地的路径,在一组中间 DTN 节点之间对同一数据包进行多次承载和转发,这种攻击很容易发生,因为任何入侵者都可以简单地作为中间节点插入在任何源和目的地之间的路径上。 μDTNSec 通过不对称地利用签名模式的真实性和先签名后加密的模式来确保机密性,确保特定路径上的端到端安全。
微行星通信网络(μPCN)[75]是DTN协议的纯轻量级实现,专为嵌入式系统而设计,专门部署在低成本和低性能的立方体卫星上,通过LEO卫星星座提供全球通信。 µPCN 提供了 IPND 发现协议的修改变体,允许动态发现地面站和环路渡轮消息路由 [76],支持低成本的网络连接。此外,μPCN 利用配置消息来保存有关与地面站的适当联系和可用带宽的信息,除了在运行时调整配置选项的能力外,还可以修改预定的联系信息。
Nano-DTN [77] 是 DTN 架构的基本实现,具有基本级别的功能,允许与 Contiki 协议栈进行互操作。许多功能已被排除在该实施之外,例如保管状态报告,并且邻居发现被定期传输所取代。仅利用一层MAC层并不能增强载波侦听,也忽略了可靠性,因此数据由MAC层向上层和下层传输。 Nano-DTN仅支持泛洪路由算法,这是DTN最简单的路由策略。此外,Nano-DTN 是用 C 语言编写的,可以利用许多标准库。
DTN7 [78] 是一个通用的 DTN 实现,支持最新版本的内存安全和并发 Bundle Protocol BP7 RFC-9171 [79],它是用 Go 编程语言编写的,提供了一个开发人员友好的环境和大型标准集成库。 DTN7 的实施是为了提供针对不同情况的可扩展性,从而在紧急情况和灾难场景或极其稀疏的网络中实现端到端连接。此外,DTN7 可在各种操作系统(例如 Linux、macOS 和 Windows)下的不同硬件架构上运行,并具有适当的编程接口,用于交互中组件的并发执行。 DTN7 中 BP 的实现支持不同的路由协议,包括流行路由和在动态网络下实现自动连接发起的对等发现机制。
B-DTN7 [80] 是 BPv7 的基于浏览器的实现,它是用安全且内存安全的编程语言 Rust [81] 编写的,部署到 Web Assembly (WASM) [82] 和标准 Web 平台,以构建Web 应用程序利用 BP7 库,因此任何安装了 Web 浏览器的设备都可以切换为 DTN 节点参与者,能够创建新的捆绑包并应用存储结转方法,无需任何网络连接,从而提供安全的为后端和前端参与者提供有效的程序,能够在没有任何网络连接的情况下创建新的捆绑包并应用存储结转方法,从而为后端和前端在具有挑战性的环境下容忍网络中断提供安全有效的程序。
Prog-DTN [83] 是一种开源可编程 DTN 实现,它基于 DTN7 实现,但具有额外的扩展、更大的灵活性和更少的资源消耗。它利用接收到的包的信息和节点上下文来对同一节点的路由行为进行编程,而无需更改和重新编译 DTN 软件。 Prog-DTN 实现是用 GO 编程语言编写的,而路由策略是通过可编程接口用 JavaScript 编写的。 Prog-DTN 依赖于 BP7 的实现,它支持使用最适合的 CLA、存储结转方法和对等发现机制的点对点连接。
µD3TN [84] 是 BPv7 的最新实现。它是一种经济高效且可靠的实施方案,已经过太空测试,并且与 POSIX 和低成本微控制器兼容。 µD3TN 的主要特点是其 AAP 接口,它允许使用普通 TCP 或 POSIX ICP 套接字连接在 DTN 节点之间轻松交换消息,从而无需通信应用程序来处理 BP 详细信息。此外,μD3TN 支持多个 CLA,这些 CLA 可以在不同的操作系统线程中同时运行,从而能够在各种网络上同时进行捆绑传输。 (3.3) 节简要讨论了 µD3TN 的演示和验证。
3.3 DTN’s Demonstrations in Space (successful stories)
在延迟容忍网络(DTN)发展之前,深空通信依赖于手动管理,其中使用命令来配置和维护传输和接收。这意味着任何数据丢失都需要从任务运营中心发出重新传输的命令。然而,这种方法非常耗时、劳动密集型,并且随着网络的发展而难以管理。 DTN 提供了一种替代方法,允许通过具有类似于互联网的高度自动化的深空网络进行数据传输。这种自动化降低了运营成本,支持网络可扩展性,并在联系期间有效地利用可用带宽。此外,DTN 还能够在太空和深空网络中协作使用反应科学。
值得一提的是,IPNSIG [14] 在深空网络背景下 DTN 的开发和标准化中发挥着关键作用。其主要作用是倡导在太空任务中采用和实施 DTN 协议和技术。 IPNSIG 与航天机构、组织和研究人员合作,致力于促进使用 DTN 进行有效的深空通信。此外,该组织还组织和支持DTN技术的演示,展示其在深空通信方面的能力和优势。这些演示涉及真实场景,例如模拟地球和火星之间的通信。 IPNSIG 的贡献对于提高空间通信系统的能力以及促进在具有挑战性的深空环境中可靠和高效的数据传输至关重要。
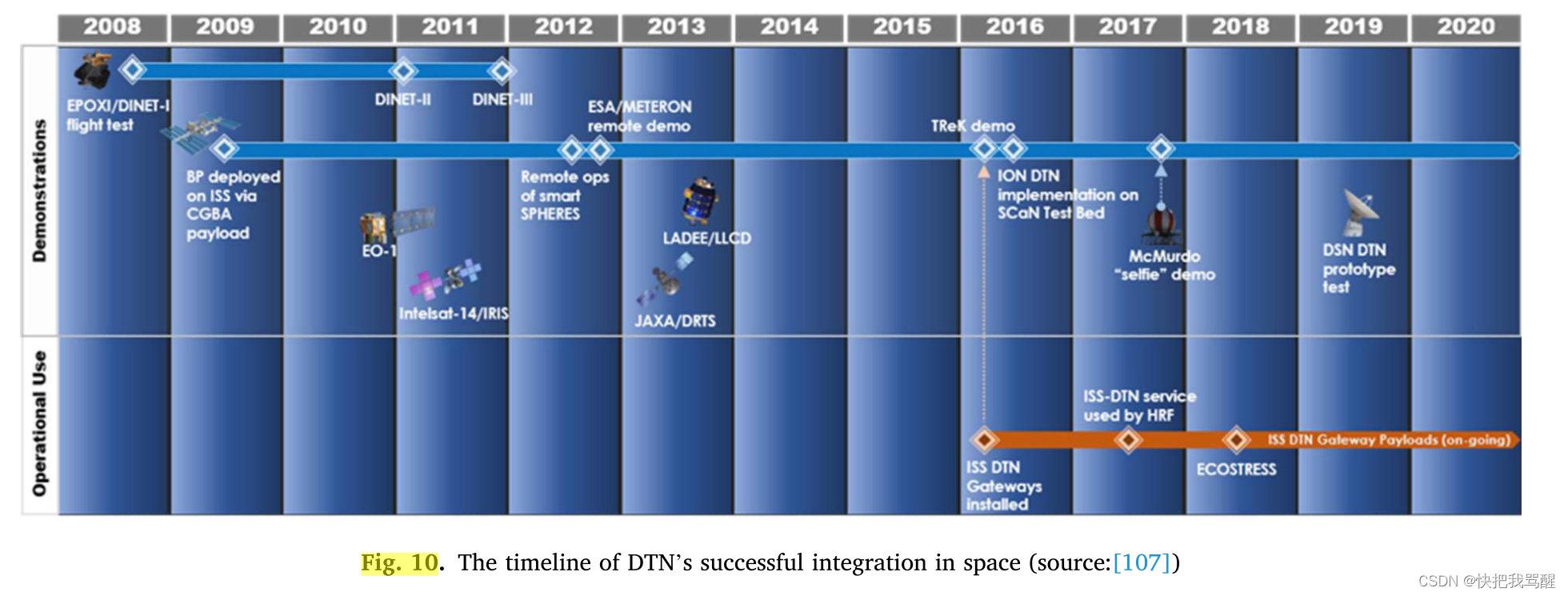
另一方面,CCSDS 推荐了用于空间互联服务的 DTN 协议。此外,国际空间信息系统委员会 (ICSIS) 要求 NASA 地月空间平台的指挥和遥测链路使用 DTN。为了进一步完善和开发支持DTN的协议,在不同的环境中进行了一系列的演示。这些演示对于推动DTN融入太空和深空网络发挥了重要作用[85]。图 10 提供了说明 NASA 在太空环境中成功演示和运行 DTN 的时间表。
JPL 从 2008 年到 2011 年完成了 Deep Impact 网络实验(DINET 1、2 和 3)[86,87]。这些实验旨在验证、验证和在 Deep Impact 航天器上安装 DTN 架构的基本功能,距地球约2400万公里。 EPOXI 项目 [88] 与 JPL 合作开展了这项工作。 DINET 1 涉及在 JPL 地面节点和航天器之间传输和接收 300 张图像,历时 27 天。该实验成功验证了 DTN 的 BP 和 LTP 元件在深空环境中的运行。 DINET 2 继 DINET 1 之后演示了 DTN 的自动化功能以及验证和安装星际覆盖网络 (ION) 软件。在这次实验中,深度撞击航天器有效地充当了中继节点,用于在包括国际空间站在内的 JPL 节点之间路由流量。 DINET 3重点展示了LTP-CLA和DTN的安全机制BIB和BCB。这三个实验共同证明了DTN能够在深空任务中有效运行。
2012年,NASA和JAXA合作探索DTN的互操作性[89],其中涉及测试ION软件,包括BP、LTP和CGR,以测试JAXA对地静止卫星空间与其地面站之间的实际连接。该实验包括将 DTN 与标准互联网进行比较,以展示在模拟延迟下通过端到端空间链路传输文件时所保持的吞吐量。此外,该实验验证了CGR,并提出了增强其可扩展性以及通过网关节点连接不同区域网络的能力的概念。结果和结论建议在未来的太空探索中使用 DTN。
此外,同年,NASA在国际空间站的外部托盘上发射了空间通信和导航(SCaN)测试平台[90]。七年来,这个测试平台为网络研究人员提供了可编程的地面和空间元素。该研究包括实现和验证ION 3.3.1,以及利用简化的捆绑安全协议(SBSP)[91]在DTN捆绑层实现端到端加密安全。2016年,NASA进一步扩展了DTN的演示,实施和建立,作为国际空间站有效载荷数据传输和无开销操作的可靠服务[16]。
然而,在国际空间站上安装的智能网平台和安装的DTN 2网关平台之间的互操作性方面,提出了几个集成问题。这些问题需要对ION进行调整,以支持与DTN 2节点的互操作性。此外,RFC 6258 [92]的元数据扩展块(Metadata Extension Block)需要调整,它为特定的捆绑包指定了文件传输功能,并且LTP实现需要增强完整块传输的错误处理。DTN2也进行了更新,包括对CLA的修改和代码强化。
另一方面,OPS-SAT实验[129]成功地证明了μDTN [84]作为BPv 7实现在OPS-SAT卫星和欧空局SMILE实验室的地面站之间进行可靠的通信。OPS-SAT卫星是欧空局运营的一颗三单元立方体卫星,它利用一个通信子系统,能够通过OPS-SAT无线电接口向地面部分进行无线分组传输。BPv 7的μ D3 TN实现被调整为使用TCP/SPP接口,类似于地面段,其提供TCP套接字接口,用于使用安全通道与模拟节点通信。该实验测试了环形道路网络(RNN)概念,该概念依赖于地球上孤立网络节点之间的可靠数据传输。
OPS-SAT实验包括两种设想。第一次sce演示展示了在RRN方案中通过OPS-SAT卫星从孤立节点访问Web服务器的能力。该演示成功地证明了使用RRN架构可以实现从孤立点到热点,然后到Internet的数据传输。第二个场景旨在演示基于远程访问云服务的通信场景中ION(部署在热点元素上)和μ3DTN之间的互操作性。该场景顺利运行,展示了ION和μ D3 TN之间的互操作性,即使在RRN上使用机器学习应用程序的高级协议功能时也是如此。然而,实验也发现了一些需要注意的挑战,例如实现速率限制机制以确保稳定的数据流,并引入过滤机制以防止非DTN数据包被解释为DTN包。
验证DTN的另一种方法是通过模拟实际操作条件的虚拟测试台。这在[93,94]中得到了证明,其中使用GNU/Linux虚拟测试平台对DTN性能进行了全面评估。该测试平台允许在多跳深空通信场景中对DTN的功能进行实验,并模拟间歇性连接和延迟。虚拟测试平台由9个虚拟机组成,代表火星-地球通信节点及其中间节点,安装了ION作为DTN的完整实现。这包括CGR实现,用于在九个DTN节点之间路由流量。
根据模拟结果,可以观察到,交通流量和接触量逐渐增加的火星段。这对管理网络拥塞提出了挑战,特别是对于从着陆器离开的链路。为了防止网络饱和,需要实现安全裕度。另一方面,从地球到火星的相反方向传播的机会减少。如果有太多的对称性,它可能会导致路由不稳定,虽然这在实验中没有观察到,但在理论上是可能的。因此,控制反向对称的量至关重要。从研究的角度来看,这种行为突出表明需要研究对策。
4 Routing in DTN-based Deep Space networks
由于DTN的体系结构保证了在高延迟和可变延迟的挑战性通信条件下成功地完成束的端到端传输使命,因此可用触点的稀缺性导致了缓慢和延迟的端到端束传输,并且对朝向目的地节点的路径的下一跳以及网络状态的感知最小。因此,标准的ad-hoc路由协议及其主动和被动路由策略无法支持这些挑战条件下的路由和最佳浴选择操作,因为它们依赖于计算,然后在数据转发过程之前建立从源节点到其目的地的完整路径,这需要充分了解网络状态。DTN路由策略必须考虑未来联系的可用性、DTN节点移动的模式和程度以及网络资源的可用性。因此,空间/深空网络需要适度的路由策略,可以有效地在有限的资源,不同的移动的模式,和延迟间歇性的遭遇。
4.1. DTN-based Deep Space Routing Strategies
4.1.1. Scheduled Forwarding Routing
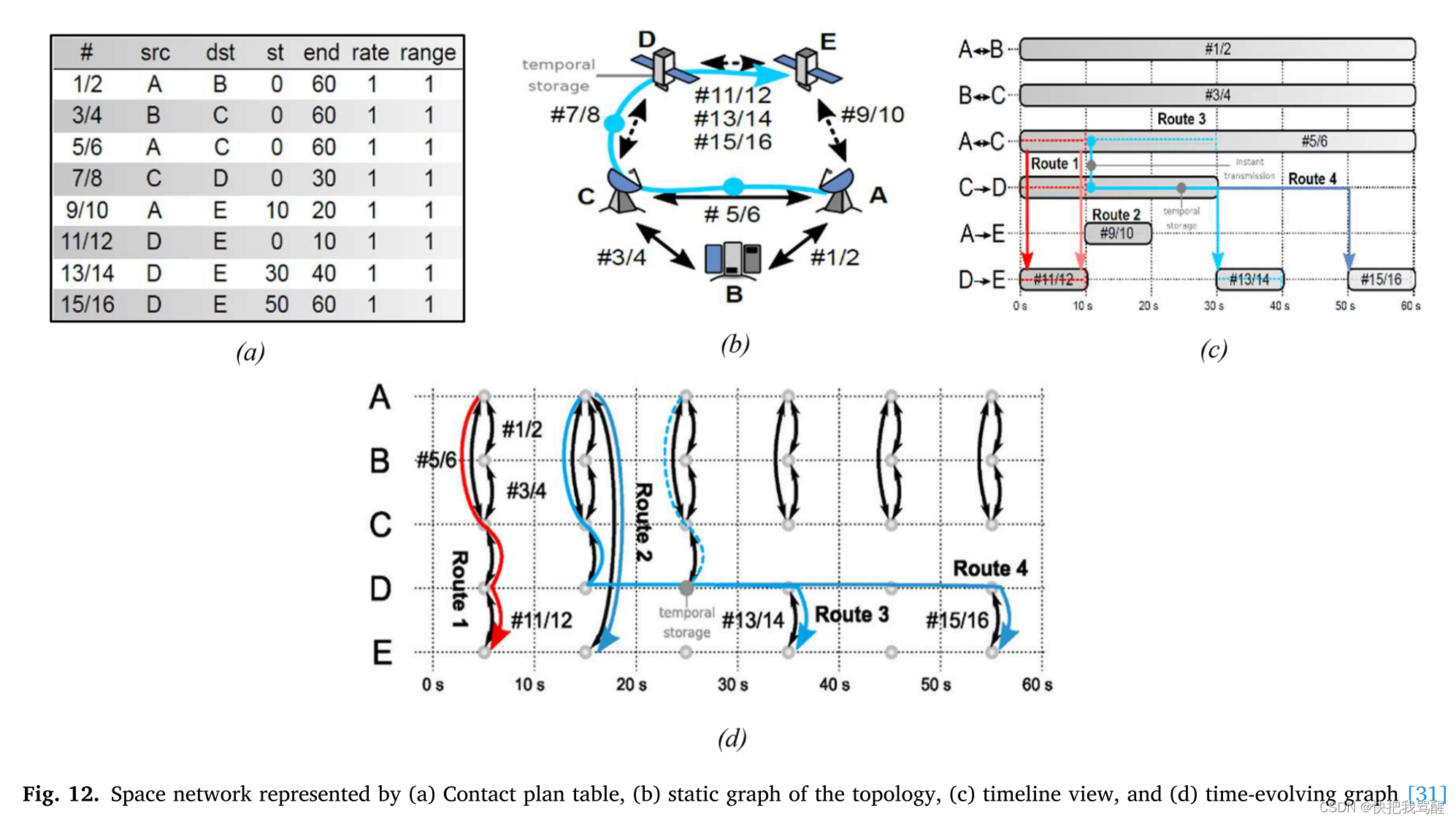
由 NASA-JPL 提出和发展的 CGR 算法 [32] 被认为是一种专门为空间路由设计的转发路由协议,它简单地利用 DTN 空间元素之间先前预定的预定联系数据库(即联系计划 CP)来实现给定的任务,通过构建可用联系人的时变图来以和谐的顺序排列它们,以构建包含空间网络所有元素之间的所有可行路由的路由表,如图 12 所示。这提供了每个单独的包保证到达目的地的端到端路径,并以最短估计交付时间(即 EDT)作为最短路径度量。 CGR 路由就像多中转旅行的航空公司航班预订系统,其中 DTN 节点是机场,捆绑包是旅客,联系人是机场之间的航班,以出发时间、到达时间为特征,以及飞机的载客量。目标是为每位旅客选择最佳的连续航班,以最早的最终到达时间到达目的地机场。
CGR 是唯一能够有效地用于地球轨道以外空间通信的算法,它经过了许多性能评估、修改和增强,这些在[31]中进行了详细调查和讨论。最近,CCSD将SABR协议[100]定义为CGR算法的推荐标准,它由三个集成逻辑阶段[101]组成,在每个DTN节点处处理每个捆绑包,如图13所示,路由计算,路由验证以及捆绑转发或复制。这些阶段之间的集成实现了寻找尽力而为路径的计算负载与挑战不足的环境中这些路径的效率之间的平衡。
路由计算阶段不考虑捆绑包的属性,例如 TTL、优先级和大小,也不考虑随时间变化的网络状态,它只是计算指定目的地的最佳路径,然后将它们插入到计算的路由中每个针对此目的地的包都要使用的列表。路由验证阶段通过检查形成每条路由的所有联系人并确保每个联系人与束属性相对应以将此计算的路由插入到候选路由列表中,在研究计算的路由列表的验证时考虑束属性。如果路线验证过程失败,则重复第一阶段以寻找另一条最佳路线。第 3 阶段考虑捆绑包状态(关键或标准)。关键包被复制,然后通过候选路由洪泛到其邻居,如果没有到特定邻居的候选路由,则将重复第一阶段以发现以该邻居开始的路由。相反,标准包将通过从候选路由列表中选择的尽力而为最早的路径转发到其下一跳,而不进行复制,以保证最早传送到目的地。由于其他第三个的实时状态旨在防止循环。 “每个邻居一条路线”增强功能需要计算每个邻居的潜在路线,即使对于标准捆绑包也是如此,以增加在第 3 阶段选择更好路线的可能性。“队列延迟”增强功能增加了预期的路线第一次计算后每个联系的延迟,这可能与实际延迟不同,并提高预计捆绑到达时间的准确性。 “防环路增强”与MSR类似,使用记录地理路由(RGR)来跟踪以前访问过的节点并防止环路。这是通过反应性和主动性机制来完成的。这种增强的计算成本并不显着,但包含 RGR 扩展会增加总束大小。
4.1.2. Predicted Forwarding Routing
标准 CGR 被认为是一种乐观路由方法,可以假设全局联系计划中预定联系的有效性,即使存在一系列可能导致拓扑变化从而影响构建最佳路由表准确性的意外事件。节点故障、天线指向不准确或意外干扰等意外事件强加了不确定联系计划的概念。最近提出了一些值得信赖的研究来改善 CGR 并提高其在不确定的接触计划下的真实性。















 1056
1056











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









