



CUDA编程-矩阵乘法和用共享内存优化
矩阵乘法
如果是使用C++进行矩阵乘法的计算,我们应该都知道,就是串行的枚举每个元素,然后计算对应的C[i][j]。对于用GPU来计算矩阵乘法来说,我们就是通过很多线程并行的计算每一个C[i][j],每个线程只负责一个对应位置元素。
代码
#include <stdio.h>
// these are just for timing measurments
#include <time.h>
// error checking macro
#define cudaCheckErrors(msg) \
do { \
cudaError_t __err = cudaGetLastError(); \
if (__err != cudaSuccess) { \
fprintf(stderr, "Fatal error: %s (%s at %s:%d)\n", \
msg, cudaGetErrorString(__err), \
__FILE__, __LINE__); \
fprintf(stderr, "*** FAILED - ABORTING\n"); \
exit(1); \
} \
} while (0)
const int DSIZE = 8192;
const int block_size = 32; // CUDA maximum is 1024 *total* threads in block
const float A_val = 3.0f;
const float B_val = 2.0f;
// matrix multiply (naive) kernel: C = A * B
__global__ void mmul(const float *A, const float *B, float *C, int ds) {
int idx = threadIdx.x+blockDim.x*blockIdx.x; // create thread x index
int idy = threadIdx.y+blockDim.y*blockIdx.y; // create thread y index
if ((idx < ds) && (idy < ds)){
float temp = 0;
for (int i = 0; i < ds; i++)
temp += A[idy*ds+i] * B[i*ds+idx]; // dot product of row and column
C[idy*ds+idx] = temp;
}
}
int main(){
float *h_A, *h_B, *h_C, *d_A, *d_B, *d_C;
// these are just for timing
clock_t t0, t1, t2;
double t1sum=0.0;
double t2sum=0.0;
// start timing
t0 = clock();
h_A = new float[DSIZE*DSIZE];
h_B = new float[DSIZE*DSIZE];
h_C = new float[DSIZE*DSIZE];
for (int i = 0; i < DSIZE*DSIZE; i++){
h_A[i] = A_val;
h_B[i] = B_val;
h_C[i] = 0;}
// Initialization timing
t1 = clock();
t1sum = ((double)(t1-t0))/CLOCKS_PER_SEC;
printf("Init took %f seconds. Begin compute\n", t1sum);
// Allocate device memory and copy input data over to GPU
cudaMalloc(&d_A, DSIZE*DSIZE*sizeof(float));
cudaMalloc(&d_B, DSIZE*DSIZE*sizeof(float));
cudaMalloc(&d_C, DSIZE*DSIZE*sizeof(float));
cudaCheckErrors("cudaMalloc failure");
cudaMemcpy(d_A, h_A, DSIZE*DSIZE*sizeof(float), cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, DSIZE*DSIZE*sizeof(float), cudaMemcpyHostToDevice);
cudaCheckErrors("cudaMemcpy H2D failure");
// Cuda processing sequence step 1 is complete
// Launch kernel
dim3 block(block_size, block_size); // dim3 variable holds 3 dimensions
dim3 grid((DSIZE+block.x-1)/block.x, (DSIZE+block.y-1)/block.y);
mmul<<<grid, block>>>(d_A, d_B, d_C, DSIZE);
cudaCheckErrors("kernel launch failure");
// Cuda processing sequence step 2 is complete
// Copy results back to host
cudaMemcpy(h_C, d_C, DSIZE*DSIZE*sizeof(float), cudaMemcpyDeviceToHost);
// GPU timing
t2 = clock();
t2sum = ((double)(t2-t1))/CLOCKS_PER_SEC;
printf ("Done. Compute took %f seconds\n", t2sum);
// Cuda processing sequence step 3 is complete
// Verify results
cudaCheckErrors("kernel execution failure or cudaMemcpy H2D failure");
for (int i = 0; i < DSIZE*DSIZE; i++) if (h_C[i] != A_val*B_val*DSIZE) {printf("mismatch at index %d, was: %f, should be: %f\n", i, h_C[i], A_val*B_val*DSIZE); return -1;}
printf("Success!\n");
return 0;
}
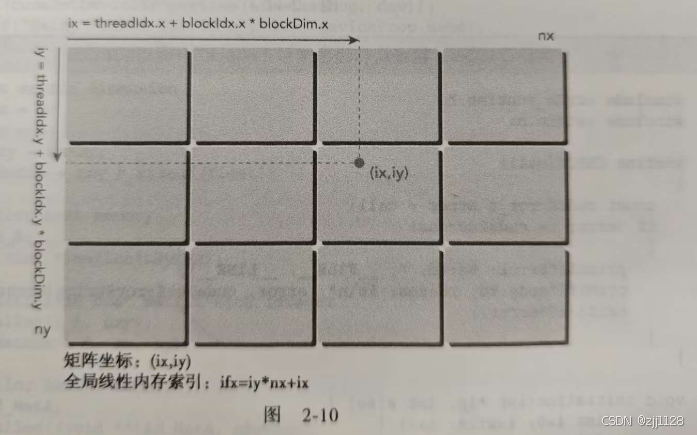
在这份代码上,我只有一点是想说。我们使用的是指针分配空间的方式来存储矩阵,也就是说用一维的方式存储矩阵,所以其实在使用的过程中,我们要时常的进行一维和二维的转换,所以会很容易弄乱。
int idx = threadIdx.x+blockDim.x*blockIdx.x; // create thread x index
int idy = threadIdx.y+blockDim.y*blockIdx.y; // create thread y index
这段代码计算出全局中线程的x和y坐标,计算这个是为了用这个线程来计算
C[i][j]的值。我们知道在矩阵乘法中,计算C[i][j]的方式是:
∑k=0k=nC[i][j]=A[i][k]∗B[k][j]\sum_{k=0}^{k=n} C[i][j]=A[i][k]*B[k][j]∑k=0k=nC[i][j]=A[i][k]∗B[k][j]
所以在每个线程中,我们都需要有一个n次的循环来计算每个C[i][j],对于这里,有一个小技巧,如果我们直接通过前面得到的线程索引idxidxidx和idyidyidy来计算一维的A[i][k]A[i][k]A[i][k]和B[k][j]B[k][j]B[k][j]会有一些乱,我们可以这样。
if ((idx < ds) && (idy < ds)){
float temp = 0;
for (int i = 0; i < ds; i++)
/*
A_x=idy
A_y=k
A[idy*ds+k]
B_x=k
B_y=idx
B[k*ds+idx]
*/
temp += A[idy*ds+i] * B[i*ds+idx]; // dot product of row and column
C[idy*ds+idx] = temp;
}
遇到的小问题
当时在练习矩阵乘法的时候,我其实是按照C[idx][idy]来计算的,但是我经过测试发现,如果是按照C[idx][idy]来计算每个C点的值,最后运行时间比用C[idy][idx]慢的多,后来发现了原因。
CUDA中的全局内存访问是按行主序存储的,这意味着同一行的元素在内存中是连续存储的,所以如果我们按行访问数据的时间应该是更快的。那不就是说明C[idx][idy]这种方式访问的更快吗?因为这种方式是通过行来访问的,但是后来我发现,在计算索引的时候,idx和idy和我们平时的使用是相反的。
所以说C[idy][idx]才是符合我们的按行访问数据的。
共享内存
按我的理解,共享内存就是在芯片上的,所以使用共享内存访问数据会比全局内存会快很多,而且共享内存的这个共享是线程块内的共享,也就是说不同块之间的共享内存是不能相互通信的,里面的数据内容也是不同的。
好了接下来我们解释一下为什么可以使用共享内存来优化矩阵乘法,刚开始的时候想了好久都没有理解这个过程,接下来我会用一个例子来解释这个问题。
a00 a01 a02 a03 b00 b01 b02 b03 c00 c01 c02 c03
a10 a11 a12 a13 * b10 b11 b12 b13 = c10 c11 c12 c13
a20 a21 a22 a23 b20 b21 b22 b23 c20 c21 c22 c23
a30 a31 a32 a33 b30 b31 b32 b33 c30 c31 c32 c33
这是一个4×4矩阵的例子,用这个例子可以扩展到很大的矩阵。
假设我们的块是block(2,2),也就是一个块里面有四个线程,也就是说我们一个线程块里面可以算出四个点的值,我们现在盯着线程块block(1,0),也就是要计算这四个点的数据:
c20 c21
c30 c31
如果从分块的角度来看:
A00 A01 B00 B01 C00 C01
* =
A10 A11 B10 B11 C10 C11
所以分块矩阵C10的计算公式:
C10=A10*B00+A11*B10
也就是说计算C10这个分块矩阵的线程块需要分块矩阵A10 B00 A11 B10,像这些重复使用的数据,我们就可以存储在分块矩阵中,因为是相加的,所以第一次我们共享内存中就存储A10和B00,然后第二次共享内存中就存储A11和B10,也就是这样:
for (int i = 0; i < ds/block_size; i++) {
// Load data into shared memory
As[threadIdx.y][threadIdx.x] = A[idy * ds + (i * block_size + threadIdx.x)];
Bs[threadIdx.y][threadIdx.x] = B[(i * block_size + threadIdx.y) * ds + idx];
// Synchronize
__syncthreads();
// Keep track of the running sum
for (int k = 0; k < block_size; k++)
temp += As[threadIdx.y][k] * Bs[k][threadIdx.x]; // dot product of row and column
__syncthreads();
}
像ds/block_size这个循环次数就是我们对大矩阵进行分块以后,进行矩阵乘法的时候,需要有几项相加,所以就需要循环几次,这样得到的值就是最终的值。
小问题
我还想说的一点是
As[threadIdx.y][threadIdx.x] = A[idy * ds + (i * block_size + threadIdx.x)];
Bs[threadIdx.y][threadIdx.x] = B[(i * block_size + threadIdx.y) * ds + idx];
这一段是把分块矩阵存储在共享内存的内容,我们看到A和B的索引的公式特别的长,让人一下子很难理解,我刚开始也是这样,因为这是用一维来表示矩阵的,但是我们可以用前面第一份代码一样,我们思考一下如果是二维的时候,x和y的值是怎么样的,然后通过一维与二维的转换,再转换为一维的来表示。
一维与二维的表示:
二维:x,y -> 一维:y*n+x

















 274
274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









