






1. 一致性模型的定义与核心思想
一致性模型是由Song Yang博士团队提出的一种生成模型,旨在解决传统扩散模型(如DDPM、DDIM)因多步迭代导致生成速度慢的问题。其核心思想是通过将概率流常微分方程(PF-ODE)路径上的任意点直接映射到轨迹的起点(即目标数据分布),从而实现单步生成,同时支持多步采样以提升生成质量。
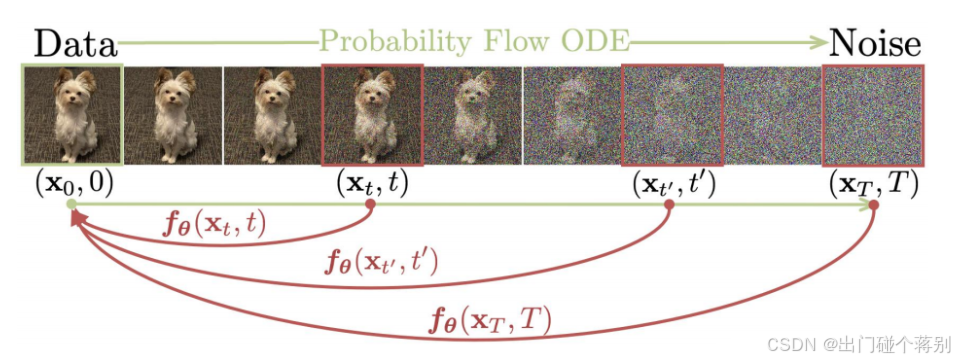
- 自一致性特性:同一轨迹上的不同噪声点经模型处理后均映射到同一初始点,确保生成结果的一致性。
- 边界条件约束:模型需满足初始时刻(如噪声完全去除时)的输出与真实数据一致,即 f θ ( x 0 , 0 ) = x 0 \boldsymbol{f}_{\boldsymbol{\theta}}(\boldsymbol{x}_0, 0) = \boldsymbol{x}_0 fθ(x0,0)=x0。
2. 技术原理与训练方法
(1) 基于PF-ODE的映射
扩散模型的去噪过程可建模为PF-ODE轨迹,一致性模型通过学习该轨迹上的点与初始点的映射关系,直接预测干净数据。例如,给定加噪样本 x t \boldsymbol{x}_t xt,模型通过 f θ ( x t , t ) = x t − t v θ ( x t , t ) \boldsymbol{f}_{\boldsymbol{\theta}}(\boldsymbol{x}_t, t) = \boldsymbol{x}_t - t\boldsymbol{v}_{\boldsymbol{\theta}}(\boldsymbol{x}_t, t) fθ(xt,t)=xt−tvθ(xt,t)直接输出去噪结果。其中 v θ \boldsymbol{v}_{\boldsymbol{\theta}} vθ为速度场(类似扩散模型中的噪声预测网络)。边界条件要求当 t = 0 t=0 t=0时, f θ ( x 0 , 0 ) = x 0 \boldsymbol{f}_{\boldsymbol{\theta}}(\boldsymbol{x}_0, 0) = \boldsymbol{x}_0 fθ(x0,0)=x0,确保生成结果在零时刻与真实数据完全对齐。
(2) 分步训练策略
为避免轨迹交叉(不同数据样本在加噪后重叠),训练采用分步优化:
- 离散化时间步:将时间区间 [ 0 , 1 ] [0,1] [0,1]等分为 n n n段,逐步训练每个时间步的映射函数。
- 渐进式目标调整:第 k k k步的训练目标不再是直接预测 x 0 \boldsymbol{x}_0 x0,而是预测前一步的输出 f θ k − 1 ∗ ( x t k − 1 , t k − 1 ) \boldsymbol{f}_{\boldsymbol{\theta}_{k-1}^*}(\boldsymbol{x}_{t_{k-1}}, t_{k-1}) fθk−1∗(xtk−1,tk−1),减少目标冲突。
- 参数共享与权重调整:所有时间步共享同一模型参数,通过动态调整不同时间步的损失权重(如时间步越靠近 t = 0 t=0 t=0权重越大),提升模型对关键生成阶段的敏感性。
(3) 与扩散模型的对比
| 特性 | 扩散模型 | 一致性模型 |
|---|---|---|
| 生成速度 | 需20~1000步迭代 | 单步生成,支持多步优化 |
| 训练依赖 | 需预训练扩散模型(部分方法) | 可独立训练或蒸馏扩散模型 |
| 应用灵活性 | 固定步长 | 支持动态调整生成步长 |
| 误差累积 | 多步误差累积显著 | 单步生成减少累积误差 |
3. 应用场景与优势
(1) 图像生成
- 快速生成:单步推理速度比扩散模型快50倍以上,接近实时生成(如OpenAI的LCM插件)。
- 零样本编辑:无需额外训练即可实现图像修补、超分辨率、着色等任务,通过插值或掩码操作调整生成过程。
(2) 性能表现
- 定量指标:在COCO数据集上,SPLAM(基于一致性模型的改进方法)在4步推理时FID得分达10.06,优于传统扩散加速方法。
- 定性效果:生成图像细节更清晰,纹理保留更完整,累积误差显著降低。
4. 改进与挑战
(1) 最新进展
- SPLAM:通过子路径线性近似(Sub-Path Linear ODE)优化累积误差,提升多步生成质量。
- 混合一致性:结合蒸馏技术与动态步长调整,平衡速度与质量。
(2) 挑战
- 训练复杂度:分步训练需精细设计时间离散化策略,易受超参数影响。
- 生成质量极限:单步生成可能丢失细节,需多步迭代弥补,但增加耗时。
5. 参考文献与资源
-
核心论文:
- Consistency Models (Song Yang, ICML 2023)。
- SPLAM: Accelerating Image Generation with Sub-Path Linear Approximation Model (ECCV 2024)。
-
开源实现:
-
GitHub代码库:https://github.com/MCG-NJU/SPLA。
-
Stable Diffusion插件LCM:支持快速图像生成。
-
1. 随机微分方程(SDE)
定义与作用
SDE(Stochastic Differential Equation)是一种包含随机噪声项的微分方程,广泛用于描述物理系统或数据生成过程中的随机性。在扩散模型中,SDE用于建模前向加噪过程,逐步将数据分布转化为高斯噪声分布。
- 数学形式:
d
x
t
=
f
(
x
t
,
t
)
d
t
+
g
(
t
)
d
w
t
d\boldsymbol{x}_t = \boldsymbol{f}(\boldsymbol{x}_t, t)dt + g(t)d\boldsymbol{w}_t
dxt=f(xt,t)dt+g(t)dwt
其中, f \boldsymbol{f} f是漂移系数, g ( t ) g(t) g(t)是扩散系数, w t \boldsymbol{w}_t wt是维纳过程(布朗运动), d t dt dt是时间步长。
在扩散模型中的应用
扩散模型通过SDE定义数据的逐步加噪过程,例如DDPM(Denoising Diffusion Probabilistic Models)的前向过程可视为离散化的SDE。通过反向SDE(Reverse SDE)可生成数据,但需多步迭代求解,计算成本高。
2. 概率流常微分方程(PF ODE)
定义与作用
PF ODE(Probability Flow Ordinary Differential Equation)是SDE的确定性版本,通过消除随机噪声项,将扩散模型的随机过程转化为确定性轨迹。其核心思想是通过ODE的确定性路径重建数据分布,从而简化生成过程。
-
数学形式: d x t = [ f ( x t , t ) − 1 2 g ( t ) 2 ∇ x t log p t ( x t ) ] d t d\boldsymbol{x}_t = \left[\boldsymbol{f}(\boldsymbol{x}_t, t) - \frac{1}{2}g(t)^2\nabla_{\boldsymbol{x}_t}\log p_t(\boldsymbol{x}_t)\right]dt dxt=[f(xt,t)−21g(t)2∇xtlogpt(xt)]dt
其中, ∇ x t log p t ( x t ) \nabla_{\boldsymbol{x}_t}\log p_t(\boldsymbol{x}_t) ∇xtlogpt(xt)是分数函数(Score Function),用于指导去噪方向。
与SDE的对比
| 特性 | SDE | PF ODE |
|---|---|---|
| 随机性 | 包含布朗运动项 | 完全确定性,无随机项 |
| 生成路径 | 多路径,需蒙特卡洛采样 | 单一路径,可通过数值方法求解 |
| 计算效率 | 需多步迭代,速度慢 | 支持单步生成(如一致性模型) |
| 应用场景 | 扩散模型前向/反向过程 | 生成式一致性模型的映射基础 |
在一致性模型中的应用
一致性模型通过学习PF ODE轨迹上的映射关系( x t → x 0 \boldsymbol{x}_t \rightarrow \boldsymbol{x}_0 xt→x0),直接预测干净数据。例如,给定噪声样本 x t \boldsymbol{x}_t xt,模型通过 f θ ( x t , t ) = x t − t v θ ( x t , t ) \boldsymbol{f}_{\boldsymbol{\theta}}(\boldsymbol{x}_t, t) = \boldsymbol{x}_t - t\boldsymbol{v}_{\boldsymbol{\theta}}(\boldsymbol{x}_t, t) fθ(xt,t)=xt−tvθ(xt,t)一步生成结果,避免多步迭代。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









