







图的遍历
深度优先算法
图的深度遍历类似于树的先根遍历,但由于图没有树的层状结构,所以我们很难从理论上去判断到底哪个结点还没被访问,所以我们需要给结点人工添加一个判断位看它是否被访问。
关于深度优先遍历的解释
深度优先遍历可以通俗地说成 “不撞南墙不回头”,即从开始结点开始,访问一个未访问的邻接结点,再从这个邻接结点出发,访问它的一个未访问的邻接结点,依次进行直到没有未被访问的邻接结点。然后才回溯。
并且由于图的存储方式不同,我们的遍历算法会随着存储方式的改变而变化
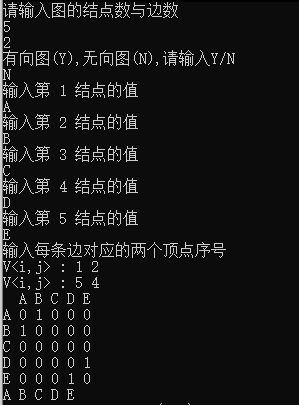
邻接矩阵存储的深度优先遍历
如果是一个连通图,我们不需要考虑那么多,直接从一个结点开始就可以遍历整个图
void Mgraph::Traverse(int v)
{
if(!node[v-1].visited)
{
cout<<node[v-1].data<<" ";
node[v-1].visited=1;
for(int i=1;i<=num_of_node;i++)
{
if(Martix[v-1][i-1]==1)
{
Traverse(i);
}
}
}
}
但更普遍的情况是我们的图并不是一个连通图,这时就需要进行一个函数的迭代
新增了一个Help函数,使用时直接使用Help函数即可(帮助循环)
void Mgraph::Traverse(int v)
{
if(!node[v-1].visited)
{
cout<<node[v-1].data<<" ";
node[v-1].visited=1;
for(int i=1;i<=num_of_node;i++)
{
if(Martix[v-1][i-1]==1)
{
Traverse(i);
}
}
}
}
void Mgraph::Help()
{
int v;
for(v=1;v<=num_of_node;v++)
{
Traverse(v);
}
}
工作正常
邻接表存储的深度优先遍历
与邻接矩阵类似,只不过将是否与结点相邻的条件换成了指针是否为NULL
直接上完整版
void Map::Traverse(int v)
{
if(!mylist[v-1].visited)
{
cout<<mylist[v-1].data<<" ";
mylist[v-1].visited=1;
while(mylist[v-1].firnode!=NULL)
{
Traverse(mylist[v-1].firnode->node);
mylist[v-1].firnode=mylist[v-1].firnode->next;
}
}
}
void Map::Help()
{
int v;
for(v=1;v<=num_of_node;v++)
{
Traverse(v);
}
}















 1227
1227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









