







一、设计要求
1、东西方向和南北方向交替准行控制东西方向准行时,东西方向上的绿灯亮,南北方向红灯亮,经过一段时间后,南北方向准行,南北方向上的绿灯亮,东西方向红灯亮,如此交替。各方向信号灯顺序为:红→绿→黄→红→绿→黄…,某一方向红灯亮的时间等于另一方向绿灯和黄灯亮的时间之和。
2、各方向红、绿灯亮的时间为6~99秒(可灵活的任意设定),以满足不同交通路口的需要。
3、当准行时间倒计时到最后3秒时,准行方向上绿灯灭,同时该方向的黄灯变为闪烁。
4、各方向要有两位数码管分别显示准行时间或禁行时间,并以秒倒计时。
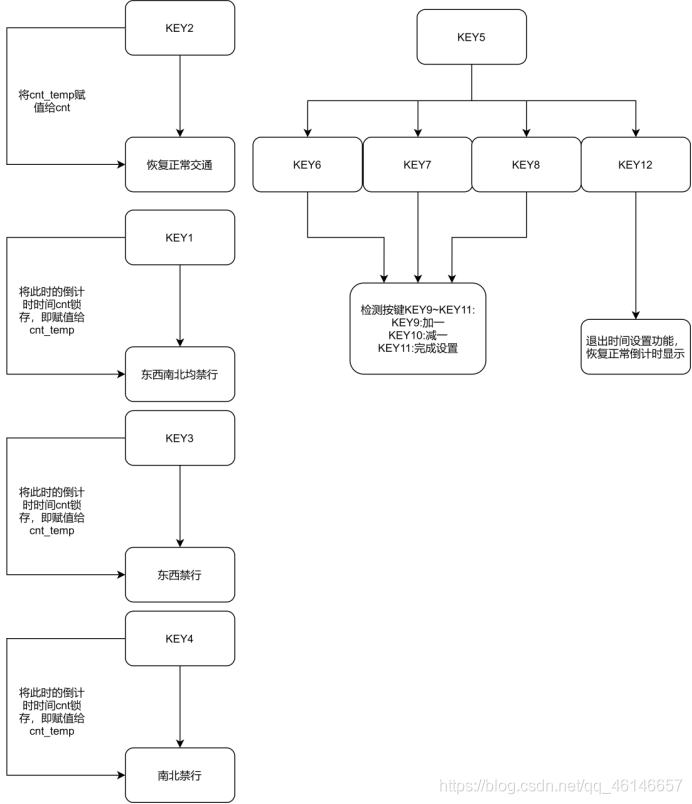
5、设置功能按键,
1)在发生交通事故时,东西方向和南北方向同时禁行。
2)强制东西方向通行。
3)强制南北方向通行。
4)恢复正常交替通行。
5)改变通行时间。
二、系统设计方案
(一)实验原理
主程序主要用于初始化和倒计时数码管显示以及部分键盘扫描。用8254在8086的CLK0下分频产生1HZ的信号,8259采用上升沿实现倒计时数据减一以及状态切换。矩阵键盘与数码管分时处理,键盘采用扫描法读取键值。采用8255实现6路LED的驱动以及数码管的显示。
(二)实验设备
实验设备:PC机一台、Wmd86编译器、TD-PITE实验装置一套
实验器件:
1、8255-键盘扫描、数码显示和LED驱动(用于检测按键、数码管显示当前倒计时数以及LED的控制);
2、8254-定时/计时单元(产生1HZ的信号,上升沿触发中断);
3、8259-中断控制(用于秒数的减一,led灯的切换和状态机的运行)。
(三)实验方法
在设计过程中,先进行分模块设计、待各模块设计调试完好后进行整合,能有效提高整体效率,加快设计进程。
在设计过程中,先对键盘扫描单元进行单独的测试,主要是参考例程。接下来设计倒计时,先达到能倒计时显示的目的,然后再加入状态机,实现基本的红绿灯功能。在完成红绿灯的基本设计后加入三个紧急开关,实现东西南北禁止通行,东西禁止通行和南北禁止通行。在完成三个紧急开关的设计后,加入设置红绿黄三灯时间的功能,到这里就已经完成了实验设计的基础要求,最后再加上一个电路的总开关,用软件控制,按下总开关按键之后数码管才会显示。
三、硬件设计
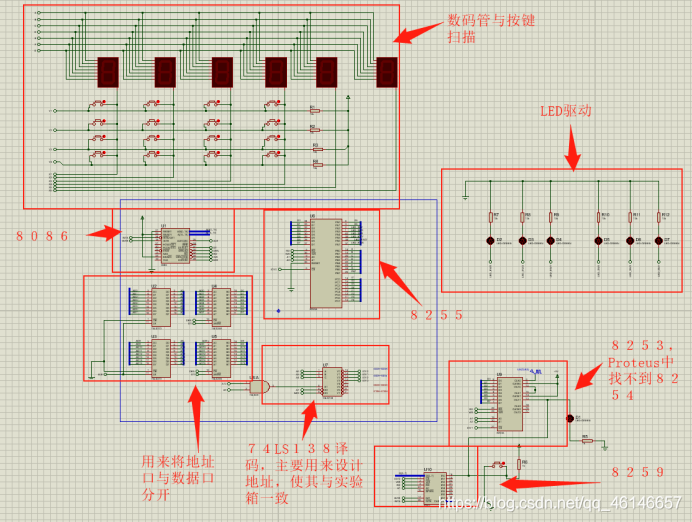
1、总体电路
由于之前采用了Proteus进行了倒计时的仿真,因此电路图用Proteus的形式给出,给出的电路是按照实验箱用户手册设计的。
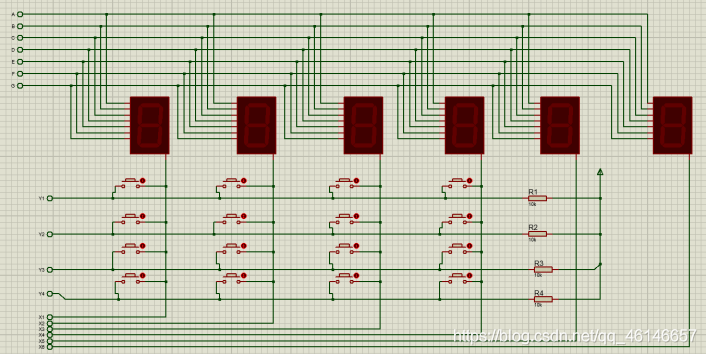
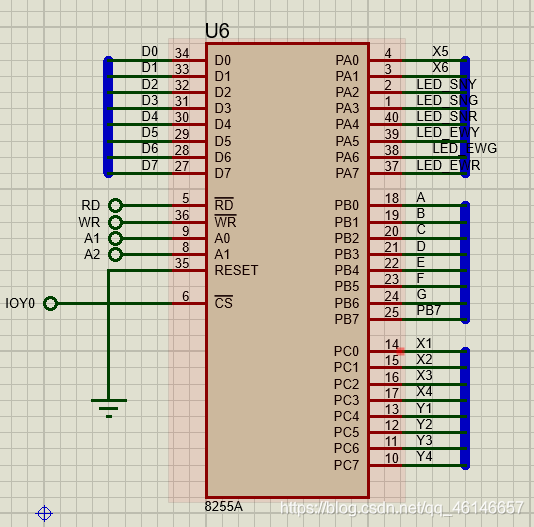
(一)键盘扫描及数码管显示单元
8255的B口用来连接数码管的数据口,C口低四位用来控制4个数码管的选通以及键盘的列选通,C口高四位用来扫描按键,判断是哪个按键按下。本次设计中有两路显示倒计时,每路两位数字,对应PC0PC3这4个引脚,X5与X6是用来在设置红绿黄灯时间时显示数据的,与8255A的PA0PA1相连。其硬件电路连接如下图所示。
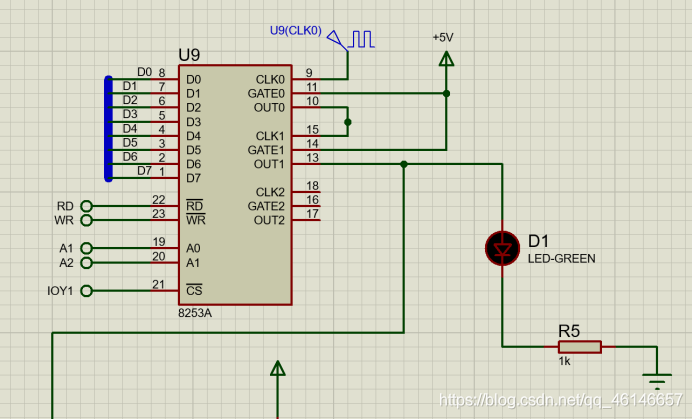
(二)8254定时单元
8254无法一次完成1000*1000的分频,因此采用课本上的方法,通道0先分频1000,通道1再分频1000,实现1MHZ/10^6=1HZ信号的产生。仿真图中LED灯实际上并没有接入,这里接入只是为了便于仿真的时候观测有没有1HZ信号输出。
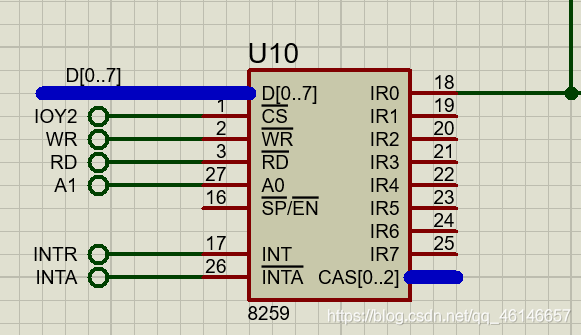
(三)8259中断单元
这一部分电路在实际上并不需要自己接。
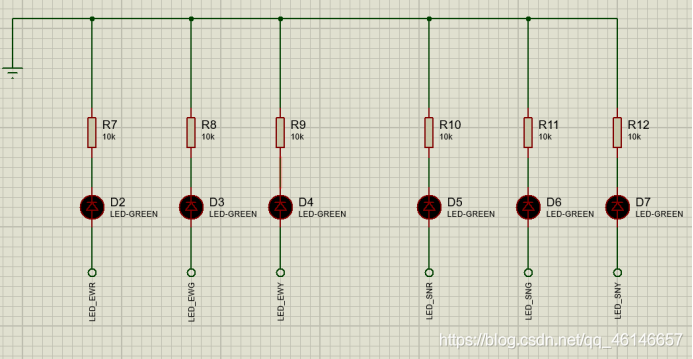
(四)LED驱动单元
仿照试验箱设计,LED为高电平点亮。LED_EWR、LED_EWG、LED_EWY分别表示东西方向红灯、绿灯、黄灯;LED_SNR、LED_SNG、LED_SNY分别表示南北方向红灯、绿灯、黄灯;
四、软件设计
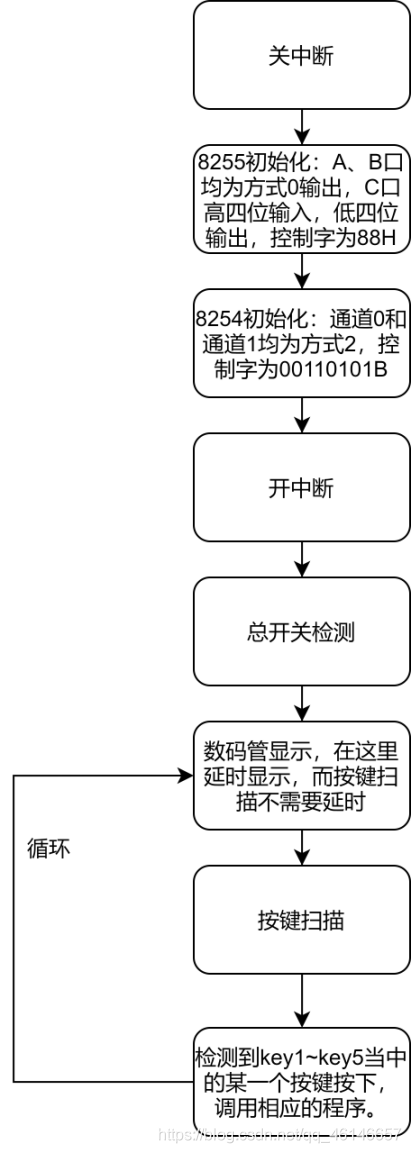
1、主程序
主程序主要进行各芯片初始化、数码管的显示、按键1~5的扫描以及总开关的打开。
按下12号按键启动系统,东西方向和南北方向交替通行,为一般红绿灯规律,红绿两灯的时间设置范围为699(可自己修改),黄灯时间设置范围为25S(可自己修改)。4x4的矩阵键盘对应功能如下:

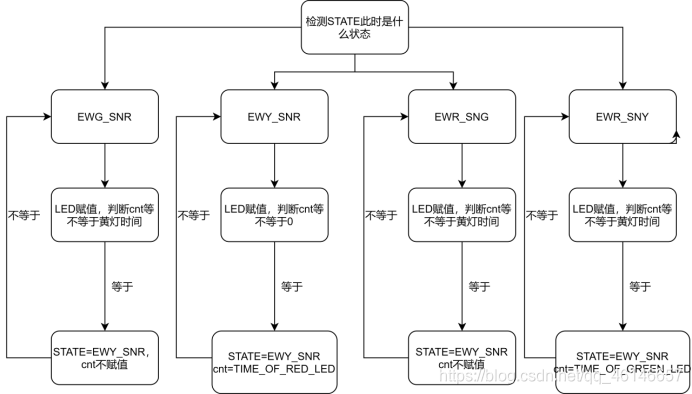
2、IRQ7中断
检测到输入了一个正脉冲,则进入IRQ7中断,实现CNT+1,还有就是变换STATE和LED的赋值。
EWG_SNR:东西方向绿灯,南北方向红灯
EWY_SNR:东西方向黄灯,南北方向红灯
EWR_SNG:东西方向红灯,南北方向绿灯
EWR_SNY:东西方向红灯,南北方向黄灯
五、遇到的问题及分析解决
①下载程序是老是下载不进去,后面通过系统复位就可以了。
②在调试按键时,原本按一下实现加减一的操作,但是实际上会加减很多次,这是因为按键的机械抖动,加入延时消抖后即可解决。
③数字显示时,之前尝试用BCD压缩去显示,发现不行,之后尝试利用除10操作得到数值的个位和十位,分别显示,效果比较好。
④在没有设置红绿黄灯的时间时,最后两位数码管也会亮,查看硬件连接图后发现在LED赋值时低两位一直赋值为00,修改为11后解决。
六、实验总结与心得体会
由于之前对微机原理的程序设计掌握得并不是很牢固,所以通过这次设计可以说是基本掌握得简单得汇编设计技巧。其实汇编与其他语言都是一样的,逻辑都还是那样,只是实现的方法不同而已,所以我习惯与先用if-else语句先罗列出大概的思路,然后用汇编去实现。鉴于之前的经验,这次没有一开始就把全部的程序写完,而是选择了分开写,最后汇总在一起再优化的方法,这样做也是为了方便查错。对于仿真,我认为很有必要去做,一来可以熟悉Proteus和emu8086等软件,二来是因为设计一个8086最小系统也是比较有意义的,尤其是地址IOY0、IOY1、IOY2的设计。虽然只做倒计时的仿真,但收获还是很多。
;------------------------------------------------------------------
;Function: (tip:配套SCNU微机原理实验箱)
;微机原理红绿灯设计,按下12号按键启动系统,东西方向和南北方向交替通行,
;为一般红绿灯规律,红绿两灯的时间设置范围为6~99(可自己修改),黄灯时间设置范围为2~5S(可自己修改)
;按键对应功能:矩阵键盘,对应原理图看
;----------------------------------------------------------------------------------------------------------------------------
;- (东西南北禁止通行) (恢复正常) (东西禁止通行) (南北禁止通行)
;y (设置时间启动) (设置红灯时间) (设置绿灯时间) (设置黄灯时间)
;轴 (选择设置哪种灯后按下则增加1)(选择设置哪种灯后按下则减少1) (结束选中设定时间的灯) (设置时间结束,恢复计时)
;- () () () (启动系统)
;-------------------------------------x轴------------------------------------------------------------------------------------
DATA SEGMENT ;数据段
;此处输入数据段
LED DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,77H,7CH,39H,5EH,79H,71H
IOY0 EQU 0600H;8255地址,对应IOY0
IOY1 EQU 0640H;8254地址,对应IOY1
IOY2 EQU 0650H;仿真用于8259,试验箱不用
PORTA EQU IOY0
PORTB EQU IOY0+02H
PORTC EQU IOY0+04H
CS8255 EQU IOY0+06H
; A口工作方式0 输入 B口工作方式0 输入
REGIS EQU 88H;AB口方式0,全为输出,C口高四位输入,低四位输出
CS8253 EQU IOY1+06H
TRANAL0 EQU IOY1
TRANAL1 EQU IOY1+02H
ICW1 EQU 20H;0620H
ICW2 EQU 21H;0622H
ICW3 EQU 21H;0622H
ICW4 EQU 21H;0622H
OCW1 EQU 21H;0622H
OCW2 EQU 20H;0620H
OCW3 EQU 20H;0620H
CNT DB 15;倒计时变量
CNT_TEMP DB 15H;锁存所有当前状态的变量
TIME_OF_RED_LED DB 10;初始红灯时间
TIME_OF_GREEN_LED DB 15;初始绿灯时间
TIME_OF_YELLOW_LED DB 3;初始黄灯时间
BREAK DB 00H;用于跳出按键5的设置时间状态
STATE DB 00H;00H--EWG-SNR;01H--EWG-SNY;10H--EWR-SNG;11H--EWY-SNG
DATA ENDS
EXTRA SEGMENT ; ;附加段
EXTRA ENDS
;
STACK SEGMENT PARA STACK 'STACK' ;堆栈段
STAPN DB 500 DUP (00H) ;定义100字节空间
TOP EQU LENGTH STAPN
STACK ENDS
CODE SEGMENT
MAIN PROC FAR ;过程定义语句
;说明4个段寄存器分别与哪些段有关
ASSUME CS:CODE, DS:DATA,ES:EXTRA,SS:STACK
START:
MOV AX,DATA
MOV DS,AX
MOV AX, EXTRA
MOV ES,AX
MOV AX,STACK
MOV SS,AX
; 此处输入代码
; 初始化8255
MOV DX,CS8255
MOV AL,REGIS
OUT DX,AL
;初始化8253,产生1HZ信号
MOV AL,00110101B;
MOV DX,CS8253
OUT DX,AL
MOV AL,00
MOV DX,TRANAL0
OUT DX,AL
MOV AL,10H
MOV DX,TRANAL0
OUT DX,AL
MOV AL,01110110B
MOV DX,CS8253
OUT DX,AL
MOV AL,0E8H
MOV DX,TRANAL1
OUT DX,AL
MOV AL,03H
MOV DX,TRANAL1
OUT DX,AL
NOT_BEGIN:
;(X4,Y4)12,对应右下角按键,按下才能正常启动系统
MOV DX,PORTC
MOV AL,00000111B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,01110000B
JNZ NOT_BEGIN
JMP BEGIN
BEGIN:
; 显示计数的初始值
MOV BX, OFFSET LED
MOV AL,CNT
XLAT
MOV DX,PORTB
OUT DX,AL
; 对8259 初始化
MOV DX,ICW1
MOV AL, 11H;00010011B
OUT DX,AL
MOV DX,ICW2
MOV AL,08H;003CH
OUT DX,AL
MOV DX,ICW4
MOV AL,01H;00000001B
OUT DX,AL
MOV DX,OCW1
MOV AL,6FH;11111000B
OUT DX,AL
;定义中断向量表
MOV AX,00H
MOV ES,AX
MOV BX, 003CH
MOV AX,OFFSET INT0
MOV ES:[BX],AX
MOV AX,CS
MOV ES:[BX+2],AX
STI
;数码管片选
CS_CONTRO:
XOR AX,AX;需要清零
MOV AL,CNT
MOV BL,10
DIV BL ;除以10,十位在AL,个位在AH,注意只有AL能OUT
;十位显示
MOV BX,AX
MOV DX,PORTC
MOV AL,00001010B;两个1代表两个十位,东西方向和南北方向的数码管显示是一样的
OUT DX,AL
MOV AX,BX
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR;记得清屏里要延时
;个位显示
MOV BX,AX
MOV DX,PORTC
MOV AL,00000101B
OUT DX,AL
MOV AX,BX
MOV AL,AH
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;键盘扫描,扫描1~5按键,6~12按键在按键5中扫描,为嵌套扫描
;(X1,Y1)
MOV DX,PORTC
MOV AL,00001110B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11100000B
JNZ KEY_Y1_X1_NO
CALL KEY_Y1_X1_YES
KEY_Y1_X1_NO:
;(X2,Y1)
MOV DX,PORTC
MOV AL,00001101B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11100000B
JNZ KEY_Y1_X2_NO
CALL KEY_Y1_X2_YES
KEY_Y1_X2_NO:
;(X3,Y1)
MOV DX,PORTC
MOV AL,00001011B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11100000B
JNZ KEY_Y1_X3_NO
CALL KEY_Y1_X3_YES
KEY_Y1_X3_NO:
;(X4,Y1)
MOV DX,PORTC
MOV AL,00000111B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11100000B
JNZ KEY_Y1_X4_NO
CALL KEY_Y1_X4_YES
KEY_Y1_X4_NO:
;(X1,Y2)
MOV DX,PORTC
MOV AL,00001110B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11010000B
JNZ KEY_Y2_X1_NO
CALL KEY_Y2_X1_YES
KEY_Y2_X1_NO:
JMP CS_CONTRO
L1:
JMP L1
RET
MAIN ENDP ;MAIN过程结束
;按键1
KEY_Y1_X1_YES PROC
CLI
PUSH AX
PUSH DX
CALL DELAY_FOR_KEY
MOV AL,CNT
MOV CNT_TEMP,AL
MOV AL,88
MOV CNT,AL
;状态不会变,不需要锁存
MOV DX,PORTA
MOV AL,10010000B
OUT DX,AL
;MOV DX,PORTC
;MOV AL,0F0H
;OUT DX,AL
POP DX
POP AX
RET
KEY_Y1_X1_YES ENDP
;按键2
KEY_Y1_X2_YES PROC
PUSH AX
PUSH DX
CALL DELAY_FOR_KEY
MOV AL,CNT_TEMP
MOV CNT,AL
STI
POP DX
POP AX
RET
KEY_Y1_X2_YES ENDP
;按键3--东西方向强行通车,南北方向禁止通车
KEY_Y1_X3_YES PROC
CLI
PUSH AX
PUSH DX
CALL DELAY_FOR_KEY
MOV AL,CNT
MOV CNT_TEMP,AL
MOV AL,88
MOV CNT,AL
;状态不会变,不需要锁存
MOV DX,PORTA
MOV AL,01010000B
OUT DX,AL
POP DX
POP AX
RET
KEY_Y1_X3_YES ENDP
;按键4--南北方向强行通车,东西方向禁止通车
KEY_Y1_X4_YES PROC
CLI
PUSH AX
PUSH DX
CALL DELAY_FOR_KEY
MOV AL,CNT
MOV CNT_TEMP,AL
MOV AL,88
MOV CNT,AL
;状态不会变,不需要锁存
MOV DX,PORTA
MOV AL,10001000B
OUT DX,AL
POP DX
POP AX
RET
KEY_Y1_X4_YES ENDP
;按键5--设置时间
KEY_Y2_X1_YES PROC
CLI
PUSH AX
PUSH DX
CALL DELAY_FOR_KEY
CONTINU_CHECK:
;(X2,Y2)6
MOV DX,PORTC
MOV AL,00001101B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11010000B
JNZ KEY_Y2_X2_NO
CALL KEY_Y2_X2_YES
KEY_Y2_X2_NO:
;(X3,Y2)7
MOV DX,PORTC
MOV AL,00001011B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11010000B
JNZ KEY_Y2_X3_NO
CALL KEY_Y2_X3_YES
KEY_Y2_X3_NO:
;(X4,Y2)8
MOV DX,PORTC
MOV AL,00000111B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,11010000B
JNZ KEY_Y2_X4_NO
CALL KEY_Y2_X4_YES
KEY_Y2_X4_NO:
;(X4,Y3)12
MOV DX,PORTC
MOV AL,00000111B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X4_NO
JMP END_SET_TIME
KEY_Y3_X4_NO:
JMP CONTINU_CHECK
END_SET_TIME:
STI
POP DX
POP AX
RET
KEY_Y2_X1_YES ENDP
;按键6--在这里扫描9,10,11号按键,实现加减
KEY_Y2_X2_YES PROC
PUSH AX
PUSH DX
PUSH BX
CALL DELAY_FOR_KEY
KEY6_CONTINU_CHECK:
;显示调整的时间
MOV DX,PORTC
MOV AL,0FH
OUT DX,AL
XOR AX,AX
MOV AL,TIME_OF_RED_LED
MOV BL,10
DIV BL
;十位显示
MOV BX,AX
MOV DX,PORTA
MOV AL,00000010B
OUT DX,AL
MOV AX,BX
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;个位显示
MOV BX,AX
MOV DX,PORTA
MOV AL,00000001B
OUT DX,AL
MOV AX,BX
MOV AL,AH
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;(X1,Y3)9--加法
MOV DX,PORTC
MOV AL,00001110B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X1_NO_RED
CALL DELAY_FOR_KEY
MOV AL,TIME_OF_RED_LED
INC AL
MOV TIME_OF_RED_LED,AL
CMP AL,99
JNA ADD_OVER_RED
MOV AL,6
ADD_OVER_RED:
MOV TIME_OF_RED_LED,AL
KEY_Y3_X1_NO_RED:
;(X2,Y3)10--减法
MOV DX,PORTC
MOV AL,00001101B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X2_NO_RED
CALL DELAY_FOR_KEY
MOV AL,TIME_OF_RED_LED
DEC AL
MOV TIME_OF_RED_LED,AL
CMP AL,6
JA DELETE_OVER_RED
MOV AL,6
DELETE_OVER_RED:
MOV TIME_OF_RED_LED,AL
KEY_Y3_X2_NO_RED:
;(X3,Y3)11
MOV DX,PORTC
MOV AL,00001011B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X3_NO_RED
JMP END_SET_TIME_OF_RED_LED
KEY_Y3_X3_NO_RED:
JMP KEY6_CONTINU_CHECK
END_SET_TIME_OF_RED_LED:
POP BX
POP DX
POP AX
RET
KEY_Y2_X2_YES ENDP
;按键7,同按键6,只是变为针对绿灯
KEY_Y2_X3_YES PROC
PUSH AX
PUSH DX
PUSH BX
CALL DELAY_FOR_KEY
KEY7_CONTINU_CHECK:
;显示调整的时间
MOV DX,PORTC
MOV AL,0FH
OUT DX,AL
XOR AX,AX
MOV AL,TIME_OF_GREEN_LED
MOV BL,10
DIV BL
;十位显示
MOV BX,AX
MOV DX,PORTA
MOV AL,00000010B
OUT DX,AL
MOV AX,BX
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;个位显示
MOV BX,AX
MOV DX,PORTA
MOV AL,00000001B
OUT DX,AL
MOV AX,BX
MOV AL,AH
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;(X1,Y3)9--加法
MOV DX,PORTC
MOV AL,00001110B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X1_NO_GREEN
CALL DELAY_FOR_KEY
MOV AL,TIME_OF_GREEN_LED
INC AL
MOV TIME_OF_GREEN_LED,AL
CMP AL,99
JNA ADD_OVER_GREEN
MOV AL,6
ADD_OVER_GREEN:
MOV TIME_OF_GREEN_LED,AL
KEY_Y3_X1_NO_GREEN:
;(X2,Y3)10--减法
MOV DX,PORTC
MOV AL,00001101B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X2_NO_GREEN
CALL DELAY_FOR_KEY
MOV AL,TIME_OF_GREEN_LED
DEC AL
MOV TIME_OF_GREEN_LED,AL
CMP AL,6
JA DELETE_OVER_GREEN
MOV AL,6
DELETE_OVER_GREEN:
MOV TIME_OF_GREEN_LED,AL
KEY_Y3_X2_NO_GREEN:
;(X3,Y3)11
MOV DX,PORTC
MOV AL,00001011B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X3_NO_GREEN
JMP END_SET_TIME_OF_GREEN_LED
KEY_Y3_X3_NO_GREEN:
JMP KEY7_CONTINU_CHECK
END_SET_TIME_OF_GREEN_LED:
POP BX
POP DX
POP AX
RET
KEY_Y2_X3_YES ENDP
;按键8--同按键6,只是变为针对黄灯
KEY_Y2_X4_YES PROC
PUSH AX
PUSH DX
PUSH BX
CALL DELAY_FOR_KEY
KEY8_CONTINU_CHECK:
;显示调整的时间
MOV DX,PORTC
MOV AL,0FH
OUT DX,AL
XOR AX,AX
MOV AL,TIME_OF_YELLOW_LED
MOV BL,10
DIV BL
;十位显示
MOV BX,AX
MOV DX,PORTA
MOV AL,00000010B
OUT DX,AL
MOV AX,BX
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;个位显示
MOV BX,AX
MOV DX,PORTA
MOV AL,00000001B
OUT DX,AL
MOV AX,BX
MOV AL,AH
MOV BX,OFFSET LED
XLAT
MOV DX,PORTB
OUT DX,AL
CALL delay10ms
CALL CLEAR
;(X1,Y3)9--加法
MOV DX,PORTC
MOV AL,00001110B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X1_NO_YELLOW
CALL DELAY_FOR_KEY
MOV AL,TIME_OF_YELLOW_LED
INC AL
MOV TIME_OF_YELLOW_LED,AL
CMP AL,5
JNA ADD_OVER_YELLOW
MOV AL,5
ADD_OVER_YELLOW:
MOV TIME_OF_YELLOW_LED,AL
KEY_Y3_X1_NO_YELLOW:
;(X2,Y3)10--减法
MOV DX,PORTC
MOV AL,00001101B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X2_NO_YELLOW
CALL DELAY_FOR_KEY
MOV AL,TIME_OF_YELLOW_LED
DEC AL
MOV TIME_OF_YELLOW_LED,AL
CMP AL,2
JA DELETE_OVER_YELLOW
MOV AL,2
DELETE_OVER_YELLOW:
MOV TIME_OF_YELLOW_LED,AL
KEY_Y3_X2_NO_YELLOW:
;(X3,Y3)11
MOV DX,PORTC
MOV AL,00001011B
OUT DX,AL
IN AL,DX
AND AL,0F0H
CMP AL,10110000B
JNZ KEY_Y3_X3_NO_YELLOW
JMP END_SET_TIME_OF_YELLOW_LED
KEY_Y3_X3_NO_YELLOW:
JMP KEY8_CONTINU_CHECK
END_SET_TIME_OF_YELLOW_LED:
POP BX
POP DX
POP AX
RET
KEY_Y2_X4_YES ENDP
;中断主要实现接收8254的OUT2的上升沿触发,实现CNT+1,还有就是变换STATE,调用相应的子程序进行数码管显示和灯的显示
;在写程序之前先画好状态机流程图
INT0 PROC
PUSH AX
CLI
;MOV AL,CNT
; INC AL
; AND AL,0FH
; MOV CNT,AL
MOV AL,CNT
DEC AL
MOV CNT,AL
MOV AL,STATE
CMP AL,00H
JZ EWG_SNR
CMP AL,01H
JZ EWY_SNR
CMP AL,10H
JZ EWR_SNG
CMP AL,11H
JZ EWR_SNY
EWG_SNR:
MOV DX,PORTA
MOV AL,01010011B;最后两位为11,防止显示倒计时时产生干扰
OUT DX,AL
MOV AL,CNT
CMP AL,TIME_OF_YELLOW_LED
JNZ END_EWG_SNR
CALL EWG_SNR_PROC
END_EWG_SNR:
JMP END_INTO0
EWY_SNR:
MOV DX,PORTA
MOV AL,00110011B
OUT DX,AL
CALL DELAY_FOR_YELLOW
MOV AL,00010011B
OUT DX,AL
MOV AL,CNT
CMP AL,0
JNZ END_EWY_SNR
CALL EWY_SNR_PROC
END_EWY_SNR:
JMP END_INTO0
EWR_SNG:
MOV DX,PORTA
MOV AL,10001011B
OUT DX,AL
MOV AL,CNT
CMP AL,TIME_OF_YELLOW_LED
JNZ END_EWR_SNG
CALL EWR_SNG_PROC
END_EWR_SNG:
JMP END_INTO0
EWR_SNY:
MOV DX,PORTA
MOV AL,10000111B
OUT DX,AL
CALL DELAY_FOR_YELLOW
MOV AL,10000011B
OUT DX,AL
MOV AL,CNT
CMP AL,0
JNZ END_EWR_SNY
CALL EWR_SNY_PROC
END_EWR_SNY:
JMP END_INTO0
END_INTO0:
MOV DX,OCW2
MOV AL,20H
OUT DX,AL
STI
POP AX
IRET
INT0 ENDP
EWG_SNR_PROC PROC
PUSH AX
MOV AL,STATE
MOV AL,01H
MOV STATE,AL
POP AX
RET
EWG_SNR_PROC ENDP
EWY_SNR_PROC PROC
PUSH AX
MOV AL,STATE
MOV AL,10H
MOV STATE,AL
MOV AL,TIME_OF_RED_LED
MOV CNT,AL
POP AX
RET
EWY_SNR_PROC ENDP
EWR_SNG_PROC PROC
PUSH AX
MOV AL,STATE
MOV AL,11H
MOV STATE,AL
POP AX
RET
EWR_SNG_PROC ENDP
EWR_SNY_PROC PROC
PUSH AX
MOV AL,STATE
MOV AL,00H
MOV STATE,AL
MOV AL,TIME_OF_GREEN_LED
MOV CNT,AL
POP AX
RET
EWR_SNY_PROC ENDP
;不准确的延时
delay10ms proc
PUSH CX
push ax
MOV CX,000aH
T1: MOV AX,008FH
T2: DEC AX
JNZ T2
LOOP T1
pop ax
POP CX
RET
delay10ms endp
;按键消抖
DELAY_FOR_KEY PROC
PUSH CX
PUSH AX
MOV CX,0AAAH
T3: MOV AX,008FH
T4: DEC AX
JNZ T4
LOOP T3
POP AX
POP CX
RET
DELAY_FOR_KEY ENDP
;作为黄灯闪烁的时钟
DELAY_FOR_YELLOW PROC
PUSH CX
PUSH AX
MOV CX,009AH
T5: MOV AX,008FH
T6: DEC AX
JNZ T6
LOOP T5
POP AX
POP CX
RET
DELAY_FOR_YELLOW ENDP
clear proc
push dx
push ax
mov dx,PORTB
mov al,00H
out dx,al
call delay10ms
pop ax
pop dx
ret
clear endp
CODE ENDS ;代码段结束
END MAIN ;整个源代码结束
电路连接图(Proteus)
提取码:7z2b


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











