







接上次一字排开阵形,现在介绍三角形阵形的实现
模拟tsp问题问题及实现方法思路参照上一篇博客 http://t.csdnimg.cn/Ky3Fq
分析三角形阵形与一字排开阵形形状上差距较大,一字排开阵形只需关于路径对称,维持动态垂直就可以实现较为完善的效果,但是三角形由于要一直保持一个角在前的效果,且一个点在路径上,换言之就是组成阵形的点,要保持相对稳定,并需要按照三角形的形状排列红点,在每次移动时根据路径的方向调整它们的位置。
整体思路
先定义了一个列表来存储三个红点相对于三角形中心的位置偏移。然后,我们根据路径的方向调整每个红点的位置。我们使用2D旋转矩阵来旋转每个红点的位置,以便三角形始终与路径方向对齐。
1.定义三角形阵形(通过与中心的偏移构建)
# 定义三角阵形的间距
spacing = 0.02
triangle_offsets = [
(0, 0), # 中心
(spacing, spacing), # 右上
(-spacing, spacing) # 左上
]
red_dots = [plt.plot([], [], 'ro')[0] for _ in triangle_offsets]2,垂直方向,路径方向(具体计算参照之前博客)
# 计算路径的方向
dx = x[j] - (x[j - 1] if j > 0 else cities[tour[i], 0])
dy = y[j] - (y[j - 1] if j > 0 else cities[tour[i], 1])
# 计算垂直方向
norm = np.sqrt(dx * dx + dy * dy)
dx_perp = -dy / norm
dy_perp = dx / norm
3,调整红点阵形稳定,顶角的方向指向路径方向
通过循环用于调整红点的位置,(offset_x, offset_y)存储了了三角形的偏移量。
每一次循环中,
1) 通过将偏移量与垂直方向的增量dx_perp和dy_perp进行线性组合,将三角形进行旋转。这是通 过以下公式实现的:
rotated_x = offset_x * dx_perp - offset_y * dy_perp
rotated_y = offset_x * dy_perp + offset_y * dx_perp2) 根据旋转后的坐标计算红点的新位置。红点的位置是通过将旋转后的坐标与中心点的坐标相加 得到的。
dot_x = center_x + rotated_x
dot_y = center_y + rotated_y
3)使用新的位置更新红点的数据。这是通过调用set_data方法来实现的,将红点的x坐标设置为[dot_x],y坐标设置为[dot_y]。通过循环的迭代,将依次调整每个红点的位置,使其与旋转后的三角形匹配。
总体代码
# 调整红点的位置
for k, (offset_x, offset_y) in enumerate(triangle_offsets):
# 旋转三角形以匹配路径方向
rotated_x = offset_x * dx_perp - offset_y * dy_perp
rotated_y = offset_x * dy_perp + offset_y * dx_perp
dot_x = center_x + rotated_x
dot_y = center_y + rotated_y
red_dots[k].set_data([dot_x], [dot_y])实现效果展示
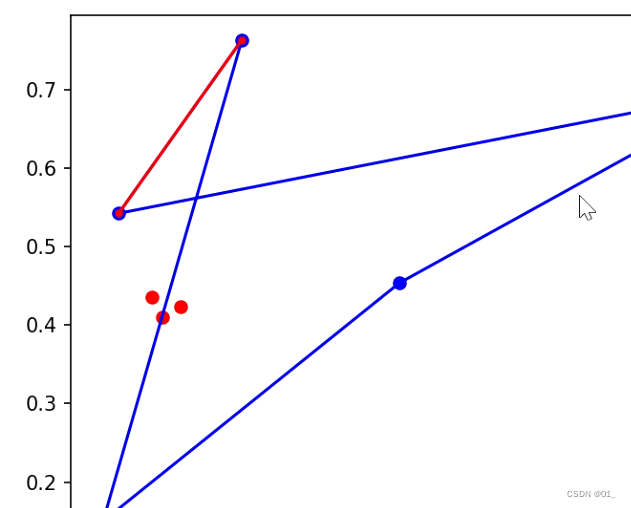
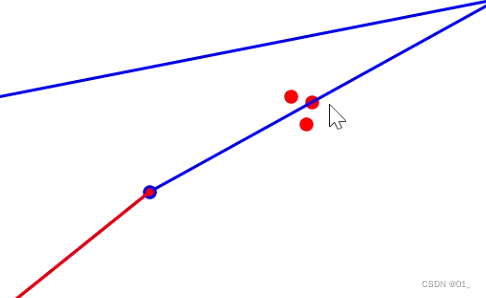
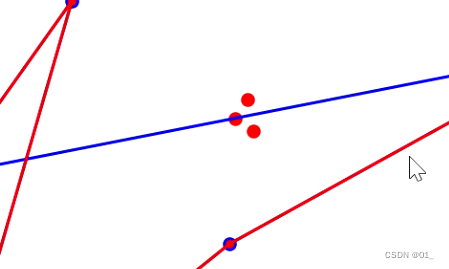
三角形阵形
总结而言,基本与一字排开阵形大同小异,因为主要思想就是维持阵形与路径同方向变化,不同阵形区别点就是不同阵形的构造不同,运动后怎么保持阵形不散。
整体实现代码,可复制粘贴,直接pycharm运行
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import linear_sum_assignment
# 创建随机城市
num_cities = 5
cities = np.random.rand(num_cities, 2)
# 计算城市之间的距离
distances = np.sqrt(((cities[:, np.newaxis, :] - cities[np.newaxis, :, :]) ** 2).sum(axis=2))
# 使用线性分配解决TSP问题
row_ind, col_ind = linear_sum_assignment(distances)
# 添加起始城市到路径
tour = np.append(col_ind, col_ind[0])
# 创建图像和红点三角阵形
fig, ax = plt.subplots()
# 定义三角阵形的间距
spacing = 0.02
triangle_offsets = [
(0, 0), # 中心
(spacing, spacing), # 右上
(-spacing, spacing) # 左上
]
red_dots = [plt.plot([], [], 'ro')[0] for _ in triangle_offsets]
# 绘制初始的蓝色路径
ax.plot(cities[:, 0], cities[:, 1], 'bo')
ax.plot(cities[tour, 0], cities[tour, 1], 'b.-')
# 移动红点三角阵形并更新路径
for i in range(num_cities + 1):
if i < num_cities:
x = np.linspace(cities[tour[i], 0], cities[tour[i + 1], 0], 100)
y = np.linspace(cities[tour[i], 1], cities[tour[i + 1], 1], 100)
for j in range(100):
center_x = x[j]
center_y = y[j]
# 计算路径的方向
dx = x[j] - (x[j - 1] if j > 0 else cities[tour[i], 0])
dy = y[j] - (y[j - 1] if j > 0 else cities[tour[i], 1])
# 计算垂直方向
norm = np.sqrt(dx * dx + dy * dy)
dx_perp = -dy / norm
dy_perp = dx / norm
# 调整红点的位置
for k, (offset_x, offset_y) in enumerate(triangle_offsets):
# 旋转三角形以匹配路径方向
rotated_x = offset_x * dx_perp - offset_y * dy_perp
rotated_y = offset_x * dy_perp + offset_y * dx_perp
dot_x = center_x + rotated_x
dot_y = center_y + rotated_y
red_dots[k].set_data([dot_x], [dot_y])
plt.draw()
plt.pause(0.01)
# 更新路径
ax.plot(cities[tour[i:i + 2], 0], cities[tour[i:i + 2], 1], 'r.-')
plt.show()















 327
327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











