







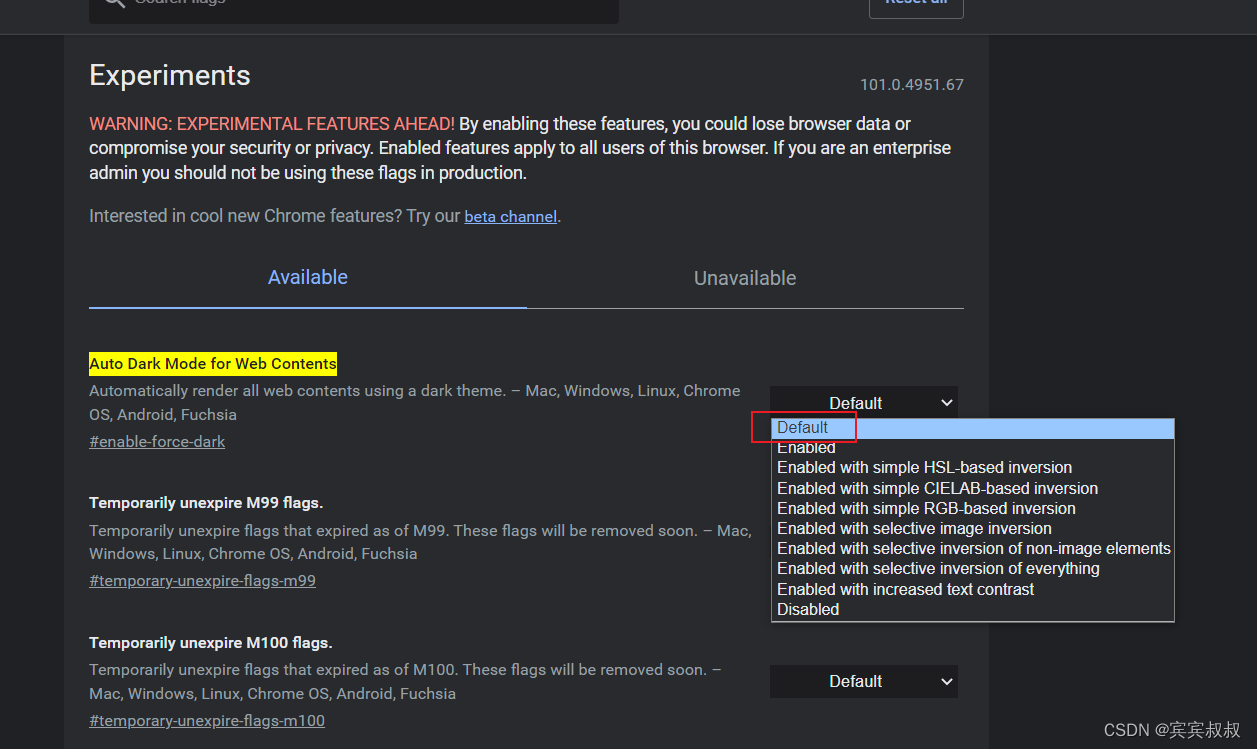
今天升级google chrome到93。chrome默认主题变为黑夜模式(dark) 。通过在Chrome的网址列贴上「chrome://flags/#enable-force-dark」這串深色模式的指令,並按下Enter鍵。按红框内由Enabled改为Default,然后重启chrome即变为正常的白底。
chrome://flags/#enable-force-dark
变成白色底色啦
今天升级google chrome到93。chrome默认主题变为黑夜模式(dark) 。通过在Chrome的网址列贴上「chrome://flags/#enable-force-dark」這串深色模式的指令,並按下Enter鍵。按红框内由Enabled改为Default,然后重启chrome即变为正常的白底。
chrome://flags/#enable-force-dark
变成白色底色啦
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























