






工业控制-机器人基本应用概念
机器人基本应用概念
前言
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
工业机器人按照机械结构分类,可以分为以下六种类型:
1、多关节机器人:
结构特点:其机械结构类似于人的手臂,臂通过扭转接头连接到底座。连接臂中连杆的旋转关节的数量可以从两个到十个不等,每个关节提供额外的自由度。接头可以彼此平行或正交,具有六个自由度的关节机器人是较常用的工业机器人,因为其设计提供了非常大的灵活性。

应用领域:广泛应用于汽车制造、电子组装、食品加工等行业,适用于焊接、装配、搬运、喷涂等作业。例如在汽车制造中进行车身焊接、零部件安装;在电子产品生产线上进行精密组装等。
多关节机器人
2、平面多关节(SCARA)机器人:
结构特点:具有圆形工作范围,由两个平行关节组成,可以在选定的平面上提供适应性。旋转轴垂直定位,安装在手臂上的末端执行器水平移动。

应用领域:主要用于装配应用,如电路板上的元件插装、塑料部件的组装等。由于其专门从事横向运动,相比圆柱坐标型和笛卡尔机器人,SCARA 机器人可以更快地移动并且更容易集成。
平面多关节(SCARA)机器人
3、并联机器人:
结构特点:也被称为平行连杆机器人,由和公共底座相连的平行关节连杆组成。由于直接控制末端执行器上的每个关节,末端执行器的定位可以通过其手臂轻松控制,从而实现高速操作。

应用领域:通常用于快速取放或产品转移应用,主要功能有抓取、包装、码垛和机床上下料等。例如在食品饮料行业的包装线上快速抓取产品进行装箱,在医药行业中进行药品的分拣和包装等。
并联机器人
4、直角坐标机器人:
结构特点:也称为直线机器人或龙门机器人,具有矩形结构。这些类型的工业机器人具有三个棱柱形关节,通过在其三个垂直轴(X、Y 和 Z)上滑动来提供线性运动。他们可能还附有手腕以允许旋转运动。

应用领域:在大多数工业应用中使用,因为它们在配置方面提供了灵活性,适合特定的应用需求。可提供高定位精度以及承受重型物件的能力。常用于机床管理、装卸、机械测量、焊剂洗涤等作业。
直角坐标机器人
5、圆柱坐标机器人:
结构特点:在底座处具有至少一个旋转关节和至少一个连接连杆的棱柱形关节。这些机器人有一个圆柱形工作空间,带有一个枢轴和一个可垂直和滑动的可伸缩臂。

应用领域:主要用于拾取、旋转和放置材料的简单应用。例如在仓库中进行货物的拣选和放置,在制造业中进行简单的物料搬运等。
圆柱坐标机器人
6、协作机器人:
结构特点:旨在在共享空间中与人类互动或在附近安全工作的机器人。与传统的工业机器人相反,传统的工业机器人旨在通过与人的接触隔离来确保安全地自主工作。的安全性可能取决于轻质的结构材料、倒圆的边缘以及速度或力的限制。安全也可能需要传感器和软件来确保良好的协作行为。

应用领域:可用于自动化重复的、不符合人体工程学的任务,例如取放重型零件、机器进给和最终组装。在医疗领域辅助医生进行手术操作;在教育领域作为教学工具等也有应用。
协作机器人
综上所述,不同类型的工业机器人在结构、工作原理和应用领域上各有特点和优势,为现代工业生产提供了多样化的解决方案。
一、机器人位置描述

机器人位置变量用于描述机器人的当前“状态信息”,一般以数组的形式按序号进行存储
如:
| 变量名 | J1/X | J2/Y | J3/Z | J4/A | J5/B | J6/C | 坐标系 | 工具号 | 用户号 |
|---|---|---|---|---|---|---|---|---|---|
| P[000] | 301.1 | -5.94 | 529.491 | 3.867 | -73.736 | 176.485 | 2 | 0 | 0 |
说明:
-
坐标系类型:指明坐标值含义;
几类坐标系:
1.坐标值为机器人各关节值(J1,J2,J3,J4,J,J6)。关节值为臂相对于零点位置的旋转角度。
2.坐标系为机器人法兰盘中心点(机器人末端)相对于基坐标系的位置姿态(X,Y,Z,A,B,C)
3.坐标值为工具中心点(TCP)相对于基坐标系的位置姿态(X,Y,Z,A,B,C)
4.坐标值为工具中心点(TCP)相对于用户坐标系的位置姿态(X,Y,Z,A,B,C)
坐标系相关概念可参考这篇文章: -
臂参数:机器人到达空间同一位置姿态有多种方式,臂参数用来区分这些方式。
-
工具号:当前使用的工具,坐标系类型选择工具坐标系时有效。
-
用户号:当前使用的用户坐标系,坐标系类型选择用户坐标时有效。
-
坐标值:由坐标系指明坐标值含义。
-
位置变量分为全局和局部,一般用局部变量。
局部变量作用域为当前程序文件,只在当前程序文件中使用,存储于程序文件中。
全局位置变量作用域为整个控制器,可在控制器内所有程序中使用。它用GP[]表示,存储于系统文件中。 -
奇异位置
机器人奇异位置是指在机器人的工作空间中存在一些特定的位置,当机器人末端工具中心点达到或接近这些位置时,机器人会失去一个或多个自由度,导致运动学算法无法正常计算关节角度,从而使得机器人无法正确执行预定任务。
定义和原因
奇异位置是机器人工作空间中的特定点,当机器人进入这些点时,其雅可比矩阵的行列式为零,导致逆运动学无解。具体来说,机器人在这些位置附近进行规划运动时,会出现无穷多解的情况,即使末端执行器的位置发生微小变化,也会导致关节角度发生剧烈变化,从而使机器人无法按照预定轨迹运动。
在关节插补中,奇异位置并不会影响正常运动,而在直线插补Movl、圆弧插补Movc过程中,奇异位置会使得机器人不能正常运行。
四关节SCARA机器人奇异位置
各关节平行点

六轴串联工业机器人常见的奇异位置有三种类型:
肩部奇异点:当腕关节中心点与第一个关节的轴线共线时,会导致关节轴1和关节轴4试图瞬间旋转180度,从而引起超速报警。
肘部奇异点:当腕关节中心点落在关节2和3的轴线形成的平面上时,机器人看起来像“伸得太远”,导致肘部锁定在某个空间位置无法运动。
腕部奇异点:当关节4和关节6的轴线与关节5的轴线在同一平面内时,会导致机器人逆向运动学算法逆解的结果相互补偿,形成无数个解。

二、机器人插补运动方式
(1)点对点关节插补
用于将机器人从一个点快速的移动到另一个点,轨迹通常不在一条直线上。所有轴同时到
达目的位置。

(2)点对点直线插补
用于线性的移动到给定目标位置
 (3)点对点圆弧插补
(3)点对点圆弧插补
按圆弧运动移动到给定目标位置
 (4)点对点跳跃运动
(4)点对点跳跃运动
运动过程分为三段:开始的上升段,中间段和下降段。
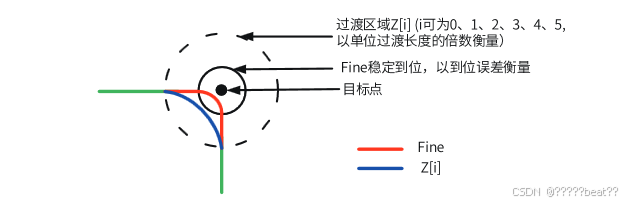
 插补运动过渡精度
插补运动过渡精度
在连续运动过程中,为了加快节拍,运动的中间点就会表现出轨迹逼近形式。轨迹逼近的程度称为过渡精度。

总结
在工业当做,很多标准化产品的机器人如四关节、6关节只要了解什么的基本概念结合其运动场景就可以编程实现简单的运动控制,主要作为一条产线中的一个小环节使用,在不考虑底层的轨迹规划问题,其实是比较简单的。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









