







 本文介绍了LeGO-LOAM,一种针对地面车辆的实时六自由度姿态估计方法,强调其实时性能和地面优化特性。通过点云分割、特征提取、两步L-M优化等步骤实现精确的位姿估计和建图。该方法在嵌入式系统上运行,能够处理复杂地形,减少运动估计漂移,并具备闭环检测功能。
本文介绍了LeGO-LOAM,一种针对地面车辆的实时六自由度姿态估计方法,强调其实时性能和地面优化特性。通过点云分割、特征提取、两步L-M优化等步骤实现精确的位姿估计和建图。该方法在嵌入式系统上运行,能够处理复杂地形,减少运动估计漂移,并具备闭环检测功能。
论文笔记—LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
文章摘要
~~~~ ~~~ 本文提出了一种用于地面车辆的实时六自由度姿态估计的轻型且经地面优化的激光雷达里程计和建图方法LeGO-LOAM。LeGO-LOAM重量轻,因为它可以在低功耗嵌入式系统上实现实时姿势估计。LeGOLOAM经过地面优化,因为它在分割和优化步骤中充分利用了地平面的存在。本文首先应用点云分割来滤除噪声,然后进行特征提取以获得独特的平面和边缘特征。然后,两步Levenberg-Marquardt优化方法使用平面和边缘特征来解决连续扫描中六自由度变换的不同分量。
导语
~~~~ ~~~ 在智能机器人的功能中,地图构建和状态估计是最基本的先决条件。致力于通过基于视觉和基于激光雷达的方法实现实时6自由度同时定位和制图(SLAM)。尽管基于视觉的方法在闭环检测中具有优势,但是如果用作唯一的导航传感器,它们对照明和视点变化的敏感性可能会使这种功能不可靠。另一方面,基于激光雷达的方法甚至可以在晚上使用,并且许多3D激光雷达的高分辨率都可以在较宽的光圈范围内捕获远距离环境的精细细节。因此,本文着重于使用3D激光雷达来支持实时状态估计和映射。
因此,本文提出了一种轻巧且经地面优化的LOAM(LeGO-LOAM),用于在地形复杂的复杂环境中对UGV进行姿态估计。LeGO-LOAM是轻量级的,因为可以在嵌入式系统上实现实时姿态估计和建图。执行点云分割以丢弃可能代表地面分离后不可靠特征的点。由于引入了两步优化的姿势估计,因此LeGO-LOAM也进行了地面优化。在第一步中,从地面提取的平面特征用于获得[ t z , θ r o l l , θ p i t c h t_z,θ_{roll},θ_{pitch} tz,θroll,θpitch]。在第二步中,其余的变换[ t x , t y , θ y a w t_x,t_y,θ_{yaw} tx,ty,θyaw]通过匹配从分段点云中提取的边缘特征来获得。此外本文还集成了执行闭环以纠正运动估计漂移的功能。
轻型LOAM
A.系统概述
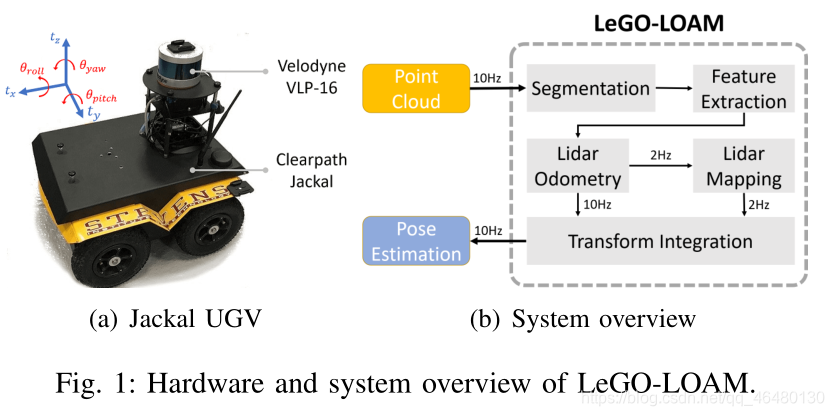
~~~~ ~~~ 上述所提出框架的概述如图1所示。系统从3D激光雷达接收输入,并输出6 DOF(自由度)姿态估计。整个系统分为五个模块。第一种是分割,它会进行一次扫描的点云并将其投影到范围图像上进行分割。分割的点云然后被送到特征提取模块。然后,激光雷达里程计使用从先前模块中提取的特征来查找与连续扫描的位姿变换。这些特征会在激光建图中被进一步处理,将其与全局点云图进行配准。最后,变换集成模块将来自激光雷达里程计和激光建图的的位姿估计结果融合在一起,并输出最终的姿态估计。
B. 分割
~~~~ ~~~ 设 P t = { p 1 , p 2 , . . . , p n } P_t =\{p_1,p_2,...,p_n\} Pt={ p1,p2,...,pn} 是在时间t获取的点云,其中 p i 是 P t p_i是P_t pi是Pt中的一个点。 P t P_t Pt首先投影到范围图像上。投影范围图像的分辨率为1800×16。现在, P t P_t Pt中的每个有效点 p i p_i pi可以由范围图像中的唯一像素表示。与 p i p_i pi相关联的范围值 r i r_i ri表示对应点 p i p_i pi到传感器的欧几里德距离。由于倾斜地形在许多环境中是常见的,因此我们不认为地面是平的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









