






启发式搜索是利用启发函数对搜索过程进行指导,从而实现高效的搜索,是一种智能搜索,典型的如A*算法。
增量搜索是对以前的搜索结果信息进行的再利用以提高搜索效率,从而大大减少搜索范围,节约搜索时间,典型如D*\LOA*\D*Lite
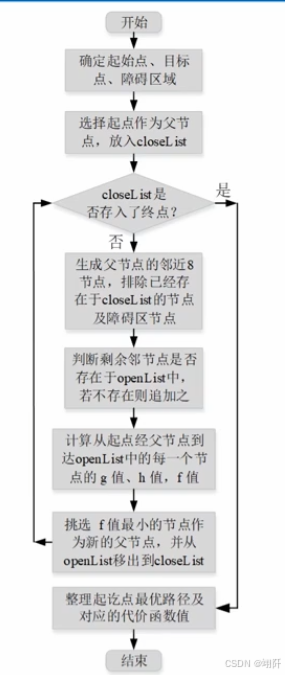
A*算法是一种静态路网中求解最短路径最有效的直接搜索方法,广泛应用于室内机器人路径搜索,游戏动画路径搜索等
路径优劣评价公式为fn=gn+hn.fn是从初始状态下经由状态N到目标状态的代价估计,gn是在状态空间中从初始状态到状态n的实际代价,hn是从状态n到目标状态的最佳路径的估计代价。
寻找邻近子节点
function childNodes = getChildNode1(field,closeList, parentNode )
[rows,cols] = size(field);
[row_parentNode,col_parentNode] = ind2sub([rows,cols],parentNode);
childNodes = [];
closeList = closeList(:,1);
%第一个子节点
childNode =[row_parentNode,col_parentNode+1];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%2
childNode =[row_parentNode-1,col_parentNode+1];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%3
childNode =[row_parentNode-1,col_parentNode];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%4
childNode =[row_parentNode-1,col_parentNode-1];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%5
childNode =[row_parentNode,col_parentNode-1];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%6
childNode =[row_parentNode+1,col_parentNode-1];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%7
childNode =[row_parentNode+1,col_parentNode];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
%8
childNode =[row_parentNode+1,col_parentNode+1];
if ~(childNode(1) < 1 || childNode(1) > rows || ...
childNode(2) < 1 || childNode(2) > cols)
if field(childNode(1),childNode(2)) ~= 2
childNode_LineIdx = sub2ind([rows,cols], childNode(1),childNode(2));
if ~ismember(childNode_LineIdx,closeList)
childNodes(end+1) = childNode_LineIdx;
end
end
end
endAstar算法
%基于栅格地图的机器人路径规划算法
clc
clear
close all
%% 构建栅格地图场景
% 栅格界面大小;行数和列数
rows = 10;
cols = 20;
%定义栅格地图全域, 并初始化空白区域
[field,cmap] = defColorMap(rows,cols);
%起始点和目标点
starPos = 2;
goalPos = rows*cols-2;
field(starPos) = 4;
field(goalPos) = 5;
%% 预处理
%初始化closeList
parentNode = starPos;
closeList = [starPos,0];
%初始化 openList
openList = struct;
childNodes = getChildNode1(field,closeList,parentNode);
for i = 1:length(childNodes)
[row_starPos,col_startPos] = ind2sub([rows,cols],starPos);
[row_goalPos,col_goalPos] = ind2sub([rows,cols],goalPos);
[row,col ] = ind2sub([rows,cols],childNodes(i));
%存入openList 结构体
openList(i).node = childNodes(i);
openList(i).g = norm([row_starPos,col_startPos]- [row,col]);
openList(i).h = abs(row_goalPos-row) + abs(col_goalPos- col);
openList(i).f = openList(i).g + openList(i).h;
end
%初始化 path
for i= 1:rows*cols
path{i,1} = i;
end
for i = 1:length(openList)
node = openList(i).node;
path{node,2} = [starPos,node];
end
%% 开始搜索
%从openlist开始搜索移动代价最小的节点
[~,idx_min] = min([openList.f]);
parentNode = openList(idx_min).node;
%进入循环
while true
%找出父节点的8个子节点
childNodes = getChildNode1(field,closeList,parentNode);
%判断这些子节点是否在open list中,若在则比较更新;没在则追加到open list中
for i = 1:length(childNodes)
%需要判断的子节点
childNode = childNodes(i);
[in_flag,idx] = ismember(childNode,[openList.node]);
%计算代价函数
[row_parentNode,col_paretNode] = ind2sub([rows,cols],parentNode);
[row_childNode,col_childNode] = ind2sub([rows,cols],childNode);
[row_goalPos,col_goalPos] = ind2sub([rows,cols],goalPos);
g = openList(idx_min).g + norm( [row_parentNode,col_paretNode] - ...
[row_childNode,col_childNode] );
h = abs(row_goalPos - row_childNode) + abs(col_goalPos - col_childNode);
f= g + h;
if in_flag %若在,比较更新g和f
if f< openList(idx).f
openList(idx).g = g;
openList(idx).h = h;
openList(idx).f = f;
path{childNode,2} = [path{parentNode,2},childNode];
end
else %若不在,追加到openlist
openList(end+1).node = childNode;
openList(end).g = g;
openList(end).h = h;
openList(end).f = f;
path{childNode,2} = [path{parentNode,2},childNode];
end
end
%从oplist中移出移动代价最小的节点到closeList
closeList(end+1,:) = [openList(idx_min).node,openList(idx_min).f];
openList(idx_min) = [];
%在openlist搜索移动代价最小的节点作为父节点
[~,idx_min] = min([openList.f]);
parentNode = openList(idx_min).node;
% 判断是否搜索到终点
if parentNode == goalPos
closeList(end+1,:) = [openList(idx_min).node,openList(idx_min).f];
break
end
end
%% 画路径
%找出目标最优路径
path_target = path{goalPos,2};
field(path_target(2:end-1)) = 6;
%画栅格图
image(1.5,1.5,field);
grid on;
set(gca,'gridline','-','gridcolor','k','linewidth',2,'GridAlpha',0.5);
set(gca,'xtick',1:cols+1,'ytick',1:rows+1);
axis image;

















 5124
5124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









