






一.模型化设计方法介绍
基于模型设计(MBD)是一种解决复杂控制,信号处理与算法设计验证等工程问题的数学可视化的方法,其可以广泛应用与运动控制,工业设备,航空航天,汽车,机器人等不同工程领域的项目开发中。MBD工程方法是一种先进的,流行的工程应用的开发方法,许多的产品被越来越多的用户喜爱和接收。
开发一个产品,如果用传统的开发方法需要经过项目设计,概念架构,立项,运维,验证等许多的环节,其过程繁琐,流程复杂,并且人力物力的成本非常高。
MBD基于模型的设计理念打破了原来产品的开发思路,将设计任务从实验室转移到了电脑桌面。简而言之就是可以完成从项目设计-仿真与建模-代码自动生成-硬件移植-测试验证的环节,
二.六轴机械臂本题,关节,伺服驱动和总线通讯
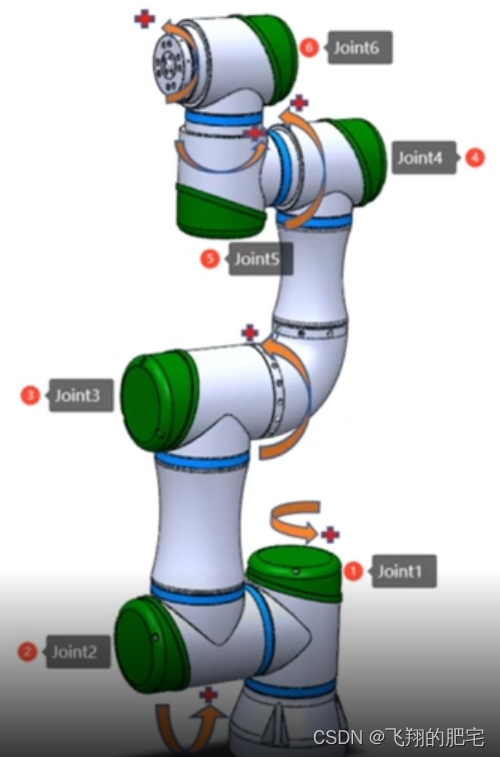
2.1 六轴机械臂本体-结构组成
六轴机械臂由6个驱动,无刷直流电机(舵机),传感器,减速器,编码器等构成的一体化的关节模组,用来连接部件,底座,末端部件。
定义底部为第一关节(即为joint1)其他关节组件从下而上定义,后面的D-H参数化建模需要用到。
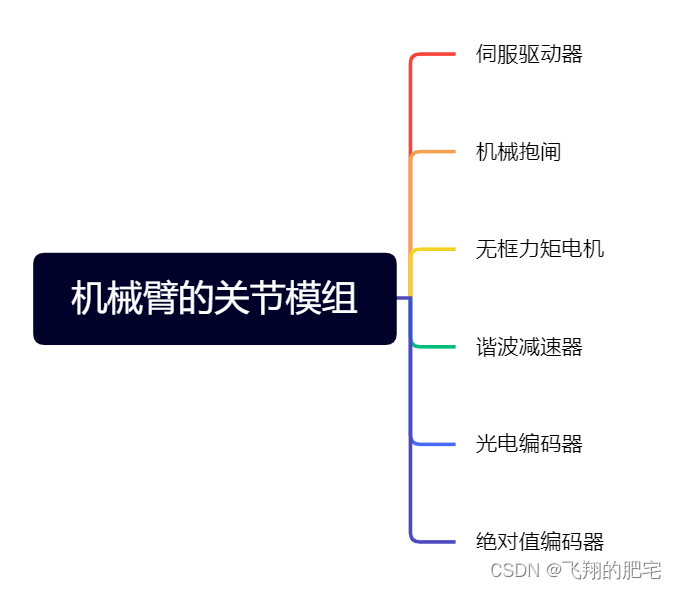
2.2 机械臂关节模组-关键零部件
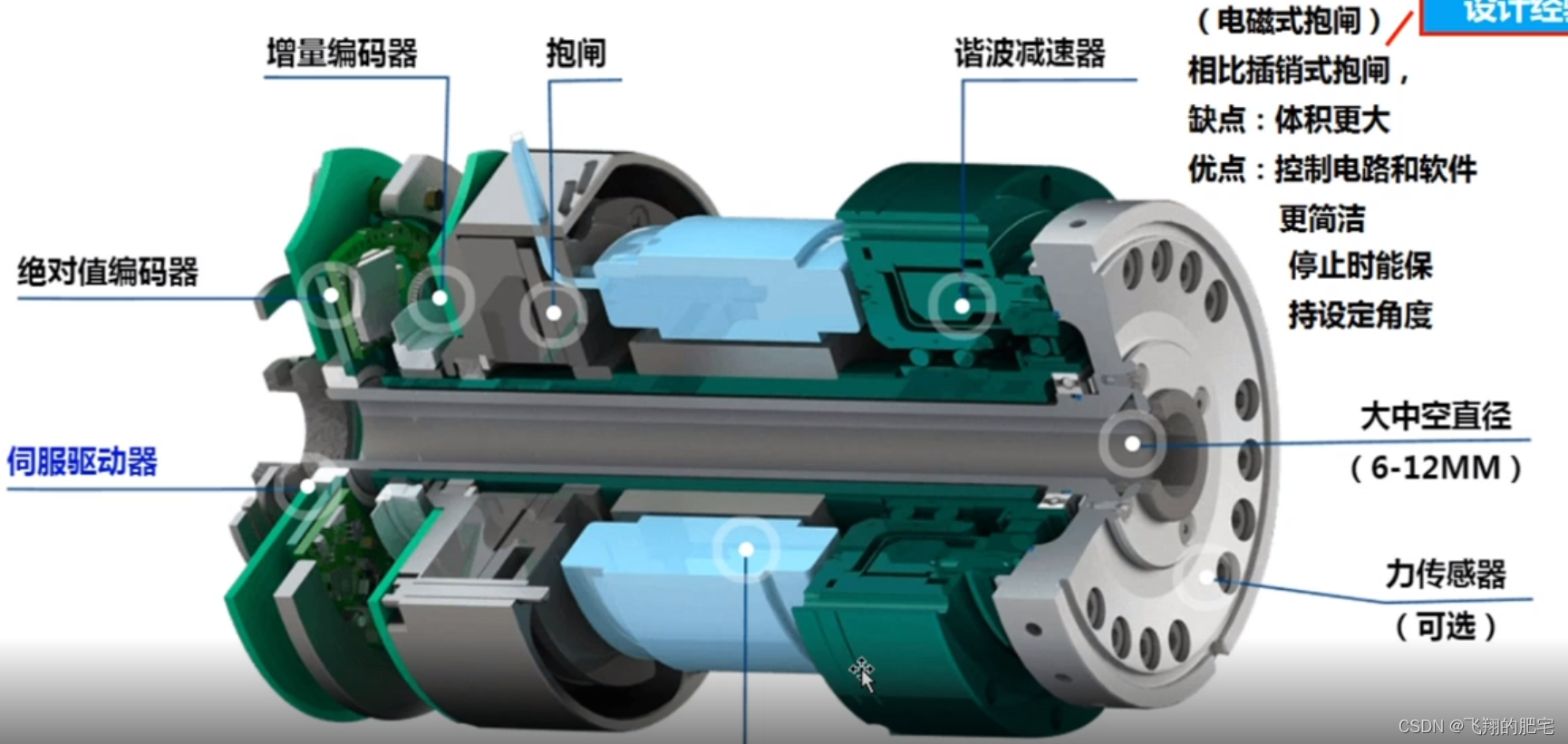
智能机械臂的关节是机械臂智能化的关键零部件,其关节模组里的构成如下所示:其主要是由伺服驱动器,机械抱闸,无框力矩电机,谐波减速器,光电编码器,绝对值编码器构成。
下面给出关节模组的剖面图:
2.3 伺服驱动器
伺服驱动器是为了写作机器人一体化关节模组所设计的一款高性能,低压,直流供电,全闭环,全数字化的伺服电机驱动器,特点是:
1. 采用高性能的TI TMS320F28069 DSP芯片来作为主控制器。
2. 其能够实现关节模组用无框力矩电机的电流,速度,位置的精确控制
3. 其可以作为外骨骼机器人,小型自动化设备等对体积有要求的伺服驱动器。
下面给出伺服驱动器的电路板图;
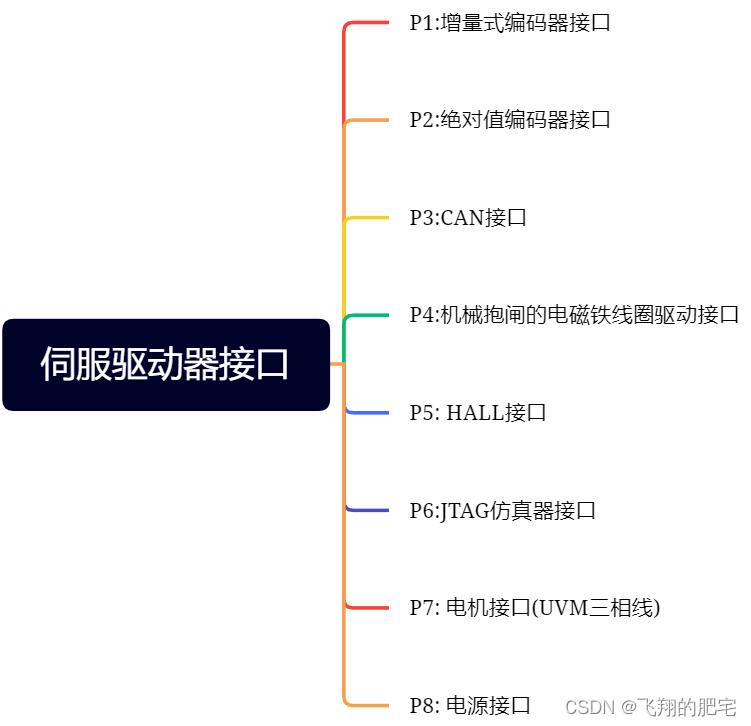
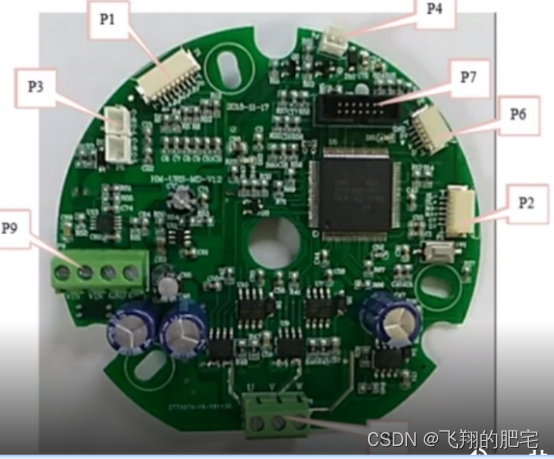 下面给出各个接口的定义:
下面给出各个接口的定义:
















 302
302











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











