






文章目录
简介
本篇文章利用Neural Renderer神经网络渲染器实现3D模型渲染的任务
(主要即复现论文FCA: Learning a 3D Full-coverage Vehicle Camouflage for Multi-view Physical Adversarial Attack中的渲染工作)
一、Neural Renderer神经网络渲染器安装
关于Neural Renderer神经网络渲染器的安装方法以下文章有详细讲解,可供参考:
Neural Renderer神经网络渲染器安装
二、数据集介绍
3D模型文件
.obj文件
包含3d模型的vertices(顶点)、faces(面片)、textures(纹理)信息,用于后续传递给neural renderer做渲染
face文件
.txt文件
包含3d模型可供渲染的faces(面片)id号
carla数据集
该数据集包含了15500组数据,数据集结构如下所示:
|-- masks
|-- phy_attack
| |-- train
| |-- test
其中:
masks文件夹中包含15500张图片,为车辆的mask掩码,如下图所示:

phy_attack文件夹中包含训练集和测试集,训练集中有12500组数据,测试集中有3000组数据
每组数据为一个data.npz文件,该文件中包含img、veh_trans、cam_trans三组参数,其中:
img:采集得到的图片

veh_trans:
2
∗
3
2*3
2∗3的矩阵,包含车辆位置参数、欧拉角参数
cam_trans:
2
∗
3
2*3
2∗3的矩阵,相机位置参数、欧拉角参数
数据集已放于以下链接,有需要可自行下载
谷歌云盘
百度网盘(dual)
数据集较大,为便于学习,本文只选用一组图片,若无需使用全部数据集可直接使用后文完整代码链接处的文件
三、代码实现
参数设置
step1.设置.obj文件路径
step2.设置.txt文件路径
step3.设置.npz文件路径
step4.设置mask文件路径
# 参数设置
parser = argparse.ArgumentParser()
parser.add_argument('--filename_obj', type=str, default='audi_et_te.obj')
parser.add_argument('--filename_face', type=str, default='exterior_face.txt')
parser.add_argument('--filename_npz', type=str, default='data1.npz')
parser.add_argument('--filename_mask', type=str, default='data1.png')
parser.add_argument('--texture_size', type=int, default=2)
args = parser.parse_args()
读取.obj文件
step1.使用neural renderer中load_obj函数读取.obj文件
# 加载obj(顶点、面片、贴图)
print('load obj file...')
vertices, faces, texture_origin = nr.load_obj(filename_obj=args.filename_obj, texture_size=2, load_texture=True)
计算待渲染纹理信息
step1.随机初始化纹理信息
step2.加载可渲染面片的id,并创建纹理mask掩码
step3.数据置于gpu
step3.利用纹理mask掩码计算最终待渲染的纹理信息
print('create texture...')
texture_size = args.texture_size
texture_param = torch.rand(faces.shape[0], texture_size, texture_size, texture_size, 3)
print('load faces which can be painted...')
texture_mask = torch.zeros(faces.shape[0], texture_size, texture_size, texture_size, 3)
with open(args.filename_face) as f:
faces_id = f.readlines()
for face_id in faces_id:
if face_id != '\n':
texture_mask[int(face_id)-1, :, :, :, :] = 1
print('to gpu...')
texture_origin = texture_origin.cuda()
texture_mask = texture_mask.cuda()
texture_param = texture_param.cuda()
print('compute new textures...')
textures = texture_origin * (1 - texture_mask) + texture_param * texture_mask
textures = textures[None,:,:,:,:,:]
vertices = vertices[None, :, :]
faces = faces[None, :, :]
neural renderer 相机参数设置
step1.加载.npz文件
step2.读取车辆与相机参数
step3.将车辆与相机参数转换为neural renderer需要的相机参数,下图展示了部分参数的含义
转换函数get_params讲解见后文
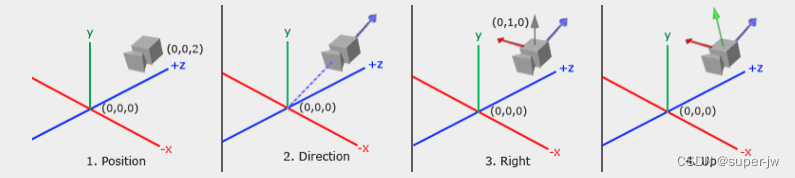
eye:相机位置
direction:拍摄方向
up:相机顶部方向
data = np.load(args.filename_npz)
# camera param
img, veh_trans, cam_trans = data['img'], data['veh_trans'], data['cam_trans']
eye, camera_direction, camera_up = get_params(cam_trans, veh_trans)
render = nr.Renderer(camera_mode='look_at', image_size=640)
render.eye = eye
render.camera_direction = camera_direction
render.camera_up = camera_up
render.background_color = [1,1,1]
render.viewing_angle = 45
render.light_direction = [0, 0, 1]
函数get_params
函数get_params讲解如下:
(个人理解,如有误烦请读者批评指正)
世界坐标系与机体坐标系的转换原理可参考此文章
def get_params(carlaTcam, carlaTveh): # carlaTcam: tuple of 2*3
scale = 0.40 # 比例
# scale = 0.38
# calc eye
eye = [0, 0, 0]
for i in range(0, 3): # 读取相机位置参数
# eye[i] = (carlaTcam[0][i] - carlaTveh[0][i]) * scale
eye[i] = carlaTcam[0][i] * scale
# calc camera_direction and camera_up
# 欧拉角
pitch = math.radians(carlaTcam[1][0]) # 绕y轴旋转角度
yaw = math.radians(carlaTcam[1][1]) # 绕z轴旋转角度
roll = math.radians(carlaTcam[1][2]) # 绕x轴旋转角度
cam_direct = [math.cos(pitch) * math.cos(yaw), math.cos(pitch) * math.sin(yaw), math.sin(pitch)] # 相机在相机坐标系的方向
cam_up = [math.cos(math.pi / 2 + pitch) * math.cos(yaw), math.cos(math.pi / 2 + pitch) * math.sin(yaw), # 相机顶部在相机坐标系的方向
math.sin(math.pi / 2 + pitch)]
# 如果物体也有旋转,则需要调整相机位置和角度,和物体旋转方式一致(坐标系变换)
# 先实现最简单的绕Z轴旋转
p_cam = eye
p_dir = [eye[0] + cam_direct[0], eye[1] + cam_direct[1], eye[2] + cam_direct[2]] # 相机在世界坐标系的方向
p_up = [eye[0] + cam_up[0], eye[1] + cam_up[1], eye[2] + cam_up[2]] # 相机顶部在世界坐标系的方向
p_l = [p_cam, p_dir, p_up]
# 绕z轴
trans_p = []
for p in p_l:
if math.sqrt(p[0] ** 2 + p[1] ** 2) == 0:
cosfi = 0
sinfi = 0
else:
cosfi = p[0] / math.sqrt(p[0] ** 2 + p[1] ** 2)
sinfi = p[1] / math.sqrt(p[0] ** 2 + p[1] ** 2)
cossum = cosfi * math.cos(math.radians(carlaTveh[1][1])) + sinfi * math.sin(math.radians(carlaTveh[1][1]))
sinsum = math.cos(math.radians(carlaTveh[1][1])) * sinfi - math.sin(math.radians(carlaTveh[1][1])) * cosfi
trans_p.append([math.sqrt(p[0] ** 2 + p[1] ** 2) * cossum, math.sqrt(p[0] ** 2 + p[1] ** 2) * sinsum, p[2]])
# 绕x轴
trans_p2 = []
for p in trans_p:
if math.sqrt(p[1] ** 2 + p[2] ** 2) == 0:
cosfi = 0
sinfi = 0
else:
cosfi = p[1] / math.sqrt(p[1] ** 2 + p[2] ** 2)
sinfi = p[2] / math.sqrt(p[1] ** 2 + p[2] ** 2)
cossum = cosfi * math.cos(math.radians(carlaTveh[1][2])) + sinfi * math.sin(math.radians(carlaTveh[1][2]))
sinsum = math.cos(math.radians(carlaTveh[1][2])) * sinfi - math.sin(math.radians(carlaTveh[1][2])) * cosfi
trans_p2.append([p[0], math.sqrt(p[1] ** 2 + p[2] ** 2) * cossum, math.sqrt(p[1] ** 2 + p[2] ** 2) * sinsum])
# 绕y轴
trans_p3 = []
for p in trans_p2:
if math.sqrt(p[0] ** 2 + p[2] ** 2) == 0:
cosfi = 0
sinfi = 0
else:
cosfi = p[0] / math.sqrt(p[0] ** 2 + p[2] ** 2)
sinfi = p[2] / math.sqrt(p[0] ** 2 + p[2] ** 2)
cossum = cosfi * math.cos(math.radians(carlaTveh[1][0])) + sinfi * math.sin(math.radians(carlaTveh[1][0]))
sinsum = math.cos(math.radians(carlaTveh[1][0])) * sinfi - math.sin(math.radians(carlaTveh[1][0])) * cosfi
trans_p3.append([math.sqrt(p[0] ** 2 + p[2] ** 2) * cossum, p[1], math.sqrt(p[0] ** 2 + p[2] ** 2) * sinsum])
trans_p = trans_p3
# camera_direction与camera_up参数转换至相机坐标系
return trans_p[0], \
[trans_p[1][0] - trans_p[0][0], trans_p[1][1] - trans_p[0][1], trans_p[1][2] - trans_p[0][2]], \
[trans_p[2][0] - trans_p[0][0], trans_p[2][1] - trans_p[0][1], trans_p[2][2] - trans_p[0][2]]
进行渲染
step1.将顶点、面片、纹理信息传入neural renderer,将得到根据所设定的相机参数拍摄得到的图片
images, _, _ = render(vertices, faces, textures)
添加背景
step1.读取图片mask掩码
step2.resize至统一大小
step3.组合得到最终图片
step4.保存结果
img_mask = cv2.imread(args.filename_mask)
img_mask = cv2.resize(img_mask, (images[0].shape[1],images[0].shape[1]))
img = cv2.resize(img, (images[0].shape[1],images[0].shape[1]))
tool = transforms.ToTensor()
img = tool(img).cuda()
img_mask = tool(img_mask).cuda()
final_img = img_mask * images[0] + (1-img_mask) * img
tool = transforms.ToPILImage()
outcome = np.asarray(tool(final_img))
cv2.imwrite('./outcome.png', outcome)
print('end...')
结果展示

总结
以上就是利用Neural Renderer神经网络渲染器实现3D模型渲染的介绍,完整代码如下,项目完整代码链接处可供下载(无需积分,包含所需的.obj、.txt文件):
import neural_renderer as nr
import argparse
import numpy as np
import torch
import torchvision.transforms as transforms
import cv2
import math
def get_params(carlaTcam, carlaTveh): # carlaTcam: tuple of 2*3
scale = 0.40
# scale = 0.38
# calc eye
eye = [0, 0, 0]
for i in range(0, 3):
# eye[i] = (carlaTcam[0][i] - carlaTveh[0][i]) * scale
eye[i] = carlaTcam[0][i] * scale
# calc camera_direction and camera_up
# 欧拉角
pitch = math.radians(carlaTcam[1][0])
yaw = math.radians(carlaTcam[1][1])
roll = math.radians(carlaTcam[1][2])
cam_direct = [math.cos(pitch) * math.cos(yaw), math.cos(pitch) * math.sin(yaw), math.sin(pitch)] # 相机在相机坐标系的方向
cam_up = [math.cos(math.pi / 2 + pitch) * math.cos(yaw), math.cos(math.pi / 2 + pitch) * math.sin(yaw), # 相机顶部在相机坐标系的方向
math.sin(math.pi / 2 + pitch)]
# 如果物体也有旋转,则需要调整相机位置和角度,和物体旋转方式一致
# 先实现最简单的绕Z轴旋转
p_cam = eye
p_dir = [eye[0] + cam_direct[0], eye[1] + cam_direct[1], eye[2] + cam_direct[2]] # 相机在世界坐标系的方向
p_up = [eye[0] + cam_up[0], eye[1] + cam_up[1], eye[2] + cam_up[2]] # 相机顶部在世界坐标系的方向
p_l = [p_cam, p_dir, p_up]
# 绕z轴
trans_p = []
for p in p_l:
if math.sqrt(p[0] ** 2 + p[1] ** 2) == 0:
cosfi = 0
sinfi = 0
else:
cosfi = p[0] / math.sqrt(p[0] ** 2 + p[1] ** 2)
sinfi = p[1] / math.sqrt(p[0] ** 2 + p[1] ** 2)
cossum = cosfi * math.cos(math.radians(carlaTveh[1][1])) + sinfi * math.sin(math.radians(carlaTveh[1][1]))
sinsum = math.cos(math.radians(carlaTveh[1][1])) * sinfi - math.sin(math.radians(carlaTveh[1][1])) * cosfi
trans_p.append([math.sqrt(p[0] ** 2 + p[1] ** 2) * cossum, math.sqrt(p[0] ** 2 + p[1] ** 2) * sinsum, p[2]])
# 绕x轴
trans_p2 = []
for p in trans_p:
if math.sqrt(p[1] ** 2 + p[2] ** 2) == 0:
cosfi = 0
sinfi = 0
else:
cosfi = p[1] / math.sqrt(p[1] ** 2 + p[2] ** 2)
sinfi = p[2] / math.sqrt(p[1] ** 2 + p[2] ** 2)
cossum = cosfi * math.cos(math.radians(carlaTveh[1][2])) + sinfi * math.sin(math.radians(carlaTveh[1][2]))
sinsum = math.cos(math.radians(carlaTveh[1][2])) * sinfi - math.sin(math.radians(carlaTveh[1][2])) * cosfi
trans_p2.append([p[0], math.sqrt(p[1] ** 2 + p[2] ** 2) * cossum, math.sqrt(p[1] ** 2 + p[2] ** 2) * sinsum])
# 绕y轴
trans_p3 = []
for p in trans_p2:
if math.sqrt(p[0] ** 2 + p[2] ** 2) == 0:
cosfi = 0
sinfi = 0
else:
cosfi = p[0] / math.sqrt(p[0] ** 2 + p[2] ** 2)
sinfi = p[2] / math.sqrt(p[0] ** 2 + p[2] ** 2)
cossum = cosfi * math.cos(math.radians(carlaTveh[1][0])) + sinfi * math.sin(math.radians(carlaTveh[1][0]))
sinsum = math.cos(math.radians(carlaTveh[1][0])) * sinfi - math.sin(math.radians(carlaTveh[1][0])) * cosfi
trans_p3.append([math.sqrt(p[0] ** 2 + p[2] ** 2) * cossum, p[1], math.sqrt(p[0] ** 2 + p[2] ** 2) * sinsum])
trans_p = trans_p3
return trans_p[0], \
[trans_p[1][0] - trans_p[0][0], trans_p[1][1] - trans_p[0][1], trans_p[1][2] - trans_p[0][2]], \
[trans_p[2][0] - trans_p[0][0], trans_p[2][1] - trans_p[0][1], trans_p[2][2] - trans_p[0][2]]
def main():
# 参数设置
parser = argparse.ArgumentParser()
parser.add_argument('--filename_obj', type=str, default='audi_et_te.obj')
parser.add_argument('--filename_face', type=str, default='exterior_face.txt')
parser.add_argument('--filename_npz', type=str, default='data1.npz')
parser.add_argument('--filename_mask', type=str, default='data1.png')
parser.add_argument('--texture_size', type=int, default=2)
args = parser.parse_args()
# 加载obj(顶点、面片、贴图)
print('load obj file...')
vertices, faces, texture_origin = nr.load_obj(filename_obj=args.filename_obj, texture_size=2, load_texture=True)
print('create texture...')
texture_size = args.texture_size
texture_param = torch.rand(faces.shape[0], texture_size, texture_size, texture_size, 3)
print('load faces which can be painted...')
texture_mask = torch.zeros(faces.shape[0], texture_size, texture_size, texture_size, 3)
with open(args.filename_face) as f:
faces_id = f.readlines()
for face_id in faces_id:
if face_id != '\n':
texture_mask[int(face_id)-1, :, :, :, :] = 1
print('to gpu...')
texture_origin = texture_origin.cuda()
texture_mask = texture_mask.cuda()
texture_param = texture_param.cuda()
print('compute new textures...')
textures = texture_origin * (1 - texture_mask) + texture_param * texture_mask
textures = textures[None,:,:,:,:,:]
vertices = vertices[None, :, :]
faces = faces[None, :, :]
print('begin renderer...')
data = np.load(args.filename_npz)
# camera param
img, veh_trans, cam_trans = data['img'], data['veh_trans'], data['cam_trans']
eye, camera_direction, camera_up = get_params(cam_trans, veh_trans)
render = nr.Renderer(camera_mode='look_at', image_size=640)
render.eye = eye
render.camera_direction = camera_direction
render.camera_up = camera_up
render.background_color = [1,1,1]
render.viewing_angle = 45
render.light_direction = [0, 0, 1]
images, _, _ = render(vertices, faces, textures)
img_mask = cv2.imread(args.filename_mask)
img_mask = cv2.resize(img_mask, (images[0].shape[1],images[0].shape[1]))
img = cv2.resize(img, (images[0].shape[1],images[0].shape[1]))
tool = transforms.ToTensor()
img = tool(img).cuda()
img_mask = tool(img_mask).cuda()
final_img = img_mask * images[0] + (1-img_mask) * img
tool = transforms.ToPILImage()
outcome = np.asarray(tool(final_img))
cv2.imwrite('./outcome.png', outcome)
print('end...')
if __name__ == '__main__':
main()















 4432
4432











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









