







在这次比赛中,本人在队伍中主要负责模型训练部分,所以本文主要讲述如何使用PaddleDetection代码自定义数据集进行目标检测,欢迎大家纠错讨论哦,不胜荣幸~
参考项目:
SSDquexianjiance - 飞桨AI Studio (baidu.com)
感谢大佬!
1.实现平台 飞桨AI Studio
2.数据集制作
VOC数据集目录格式如下:
(如何制作VOC)数据集本文暂时不做讲解。
将标注生成的XML文件存入Annotations,图片存入JPEGImages,训练集、测试集、验证集的划分情况存入ImageSets。 在ImageSets下创建一个Main文件夹,并且在Mian文件夹下建立label_list.txt,里面存入标注的标签。 此label_list.txt文件复制一份与Annotations、ImageSets、JPEGImages同级位置放置。 其内容如下:
2.在Github中下载PaddleDetectionGitHub - PaddlePaddle/PaddleDetection: Object Detection toolkit based on PaddlePaddle. It supports object detection, instance segmentation, multiple object tracking and real-time multi-person keypoint detection.
按我的理解,Paddledetection是训练的辅助工具,等于是写好了大部分代码,我们操作者只需要修改其中参数即可,下载下来后,他是一个压缩包,我们把它解压下来,放在和我们项目NoteBook路径的同一路径,可以方便直接调用。这里如果使用PaddleAIStudio工具也是需要上传PaddleDetection工具包的。(一个偷懒的技巧,因为飞桨AI的项目里,有很多关于Paddledetection的项目,大多是已经配置好的,我们可以在他们的基础上用,省的自己去下载了。)
环境准备
注:由于我是直接在飞桨AI Studio中进行模型训练的,其中关于Paddlede各种环境一般都是配置好的,所以我仅仅做了以下两种操作
#配置python环境变量
%env PYTHONPATH=/home/aistudio/PaddleDetection#测试项目环境
!export PYTHONPATH=`pwd`:$PYTHONPATH
!python ppdet/modeling/tests/test_architectures.py 运行结果如下:
如果结果是OK则表示环境OK。这步如果不是OK,那么后面的代码也不用抱有任何侥幸心理了,百分百跑不通的。
开始训练
from paddlelite.lite import *选择需要的模型进行训练,本文选用的是ssd_mobilenet_v1
#开始训练
%cd /home/aistudio/PaddleDetection/
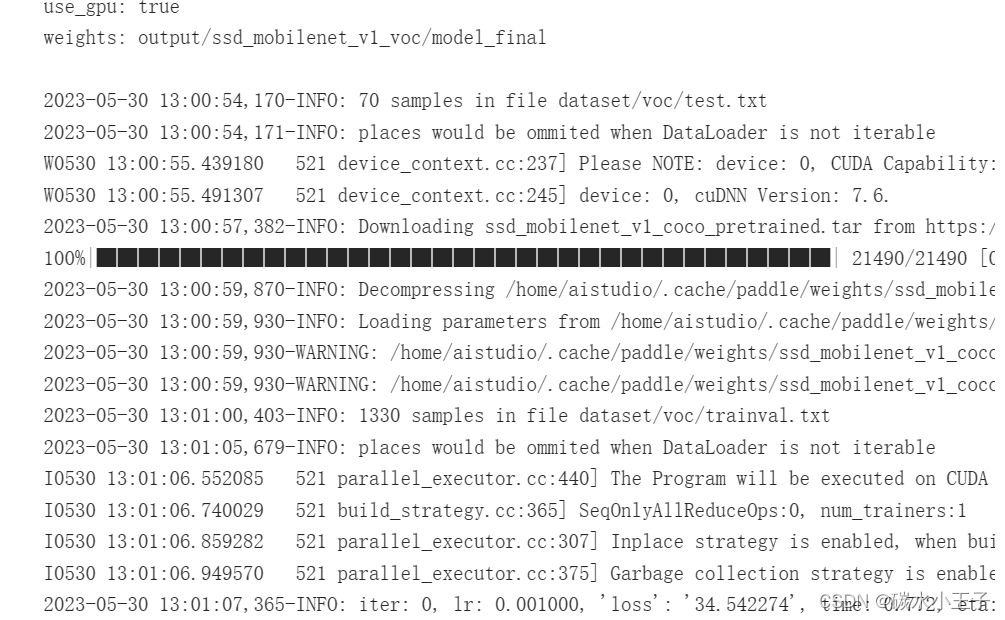
!python -u tools/train.py -c configs/ssd/ssd_mobilenet_v1_voc.yml --use_tb=True --eval跑完结果如图
查看训练效果
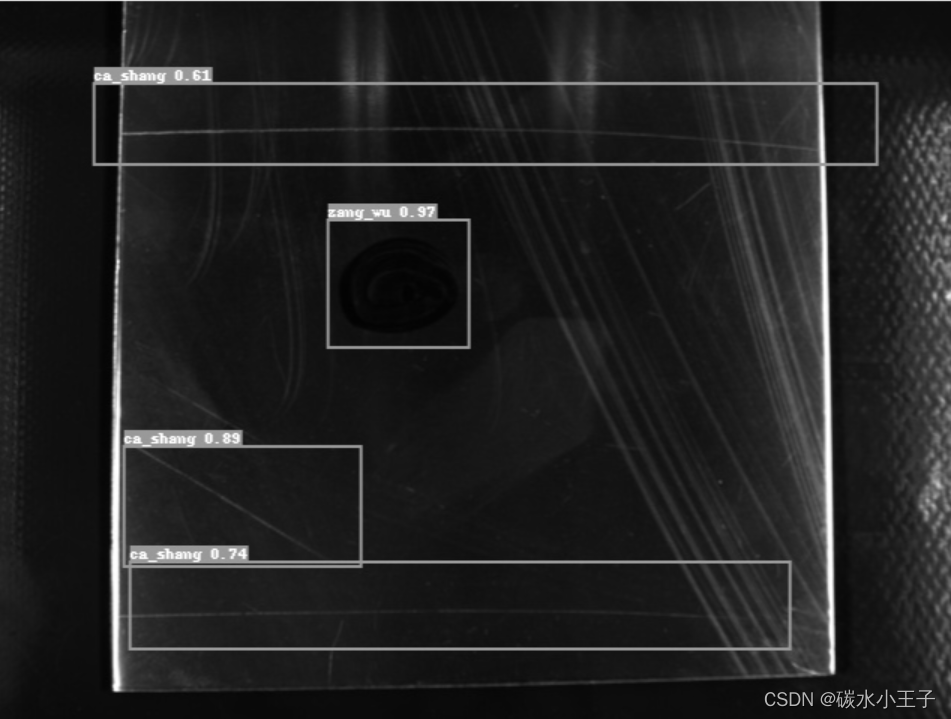
训练完成后输出的模型保存在 ./PaddleDetection/output/ssd_mobilenet_v1_voc 文件夹下,本次训练总轮数默认为28000轮,每隔2000轮保存一次模型,以轮次命名的均为阶段性模型,model_final为训练结束时保存的模型,best_model是每次评估后的最佳mAP模型
注:本文只是讲述如何运用简单运用PaddleDetection进行模型训练,但是要想得到满意的训练结果,需要根据具体情况调整参数。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











