







 本文介绍了梯度下降法的基本概念,包括最速下降法和步长固定梯度法的实现步骤和代码示例,强调了它们在优化过程中的优缺点。特别提到了共轭梯度法作为改进,结合了梯度和共轭方向,是工程领域常用的高效优化方法。
本文介绍了梯度下降法的基本概念,包括最速下降法和步长固定梯度法的实现步骤和代码示例,强调了它们在优化过程中的优缺点。特别提到了共轭梯度法作为改进,结合了梯度和共轭方向,是工程领域常用的高效优化方法。
1.引言
梯度下降法(Gradient Descent)是一种实现简单,且大部分情况下都能够很好地运行的一种优化算法,是为了极小化函数而设计的方法,仅使用目标函数的梯度作为信息进行优化,梯度下降法在各个领域广泛应用,尤其是人工智能深度学习方面。受到梯度方向为函数值增加最快的方向的启发,每次搜索方法为梯度方向的负方向,再选择合适的步长,即可使函数值减少。
下面给出梯度是函数值增加最快的方向证明,记函数在
处,
方向的增长率为
,
,使用柯西-施瓦茨不等式:
若令,则有
因此,梯度方向就是函数
在
处增加最快的方向,而梯度负方向
就是函数减少最快的方向。以
作为初始搜索点,沿着
方向进行搜索,由泰勒展开可得:
因此,如果,当
充分小的时候,有
。从目标函数极小化的角度看,新得到的点相比于有所改善,这就是梯度下降法思路的理论支撑。下面介绍两种梯度下降法的具体实现,在下一章,还会介绍基于共轭方向法(Conjugate Direction Method)的另一种优化思路,并给出结合了梯度下降和共轭方向法的著名方法共轭梯度法(Conjugate Gradient Method),该方法是在工程领域应用广泛的一种优化方法,是真正具有实用性的方法。
2.最速下降法
最速下降法(Steepest Descent)是梯度下降法的一种具体实现,其理念为在每次迭代中,以梯度的负方向作为下降方向,寻找一个合适的步长,使得目标函数
能够得到最大程度的减小。
可以视为是一维搜索函数的极小值点,即:
2.1最速下降法实现步骤
最速下降法的实现步骤可以归纳如下:
1. 给定
2. 计算如果
,停止搜索;
3. 求步长,使得
;
4. 计算;
5. k=k+1,转2.
2.2最速下降法代码实现
function [x,y] = sd(f,g,x0,tolerance)
n=length(x0); %确定变量x0的维数
k=1; %用于计数
x=zeros(n,1); %设计x矩阵储存每次迭代的x近似值
d=zeros(n,1); %设计d矩阵储存每次迭代的梯度值
x(:,k)=x0;
d(:,k)=-g(x(:,k));
y(k)=f(x(:,k));
while norm(d(:,k))>=tolerance %当梯度范数不小于给定容忍值时,进入循环
alpha1=2;
alpha2=1;
dphi1=g(x(:,k)+alpha1*d(:,k))'*d(:,k);
dphi2=g(x(:,k)+alpha2*d(:,k))'*d(:,k);
while abs(dphi2)>=0.0001 %割线法求极小化alpha的函数
if abs(dphi2-dphi1)~=0
t=alpha2-dphi2*(alpha2-alpha1)/(dphi2-dphi1);
alpha1=alpha2;
alpha2=t;
dphi1=g(x(:,k)+alpha1*d(:,k))'*d(:,k);
dphi2=g(x(:,k)+alpha2*d(:,k))'*d(:,k);
end
end
alpha=alpha2; %经过割线法优化后的alpha2即是所求的alpha值
x(:,k+1)=x(:,k)+alpha*d(:,k); %更新新的迭代点x
d(:,k+1)=-g(x(:,k+1)); %更新梯度信息
y(k+1)=f(x(:,k+1)); %更新新的函数值信息
k=k+1;
end
semilogy((1:k),y,'r*')
xlabel '迭代次数'
ylabel '优化值'
title '最速下降法随迭代次数,函数值变化情况'
end 以上代码是最速下降法的一般表达,但要注意容忍值tolerance一般不要设置太小,因为太小的容忍值往往达不到,一般设置为宜,一维搜索停机准则亦同理。
2.3性能测试
使用函数
作为测试函数,初始搜索点为
在Matlab中输入如图1
图1
近似值搜索结果如图2
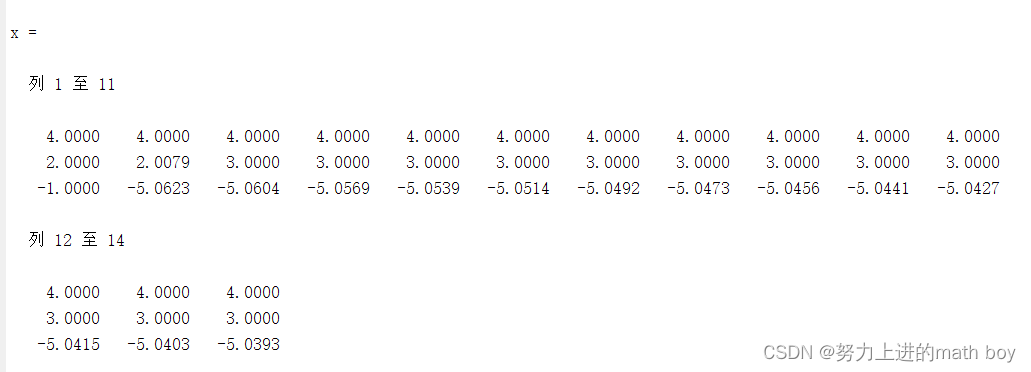
图2
函数值的优化效果如图3
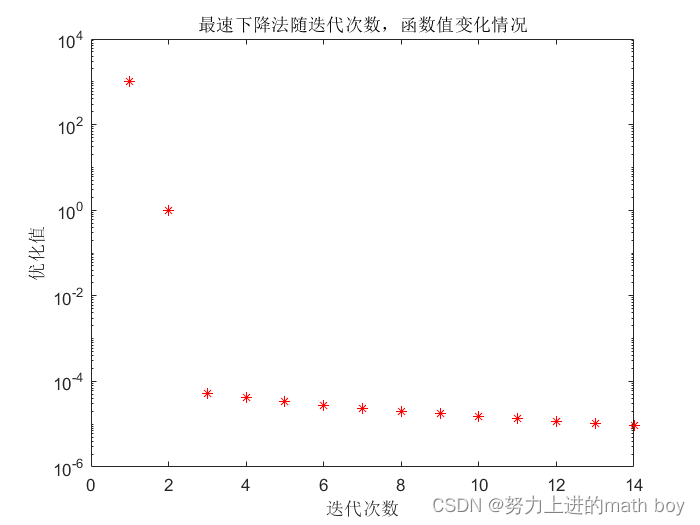
图3
因为此函数是二次型函数,当时,有
成立,只需3步即可找到函数极小值点,但此方法只适用于二次型函数,为了适应大多数函数,代码没有照此写,而是按照一维搜索求极小点的方法运行。
2.4最速下降法的改进(BB步)
Barzilai-Borwein提出两点步长梯度法,其基本思想是利用迭代当前点以及前一点的信息来确定步长因子,按袁亚湘老师的说法就是当前步的步长用上一步的最优步长,效果反而很好,即。这里不再讨论其收敛性,仅给出相应代码和效果对比。
function [x,y] = bbgd(f,g,x0,tolerance)
n=length(x0);
k=1;
x=zeros(n,1);
d=x;
x(:,k)=x0;
d(:,k)=-g(x(:,k));
y(k)=f(x(:,k));
while norm(d(:,k))>tolerance
alpha1=10;
alpha2=9;
dphi1=g(x(:,k)+alpha1*d(:,k))'*d(:,k);
dphi2=g(x(:,k)+alpha2*d(:,k))'*d(:,k);
if k==1
while abs(dphi2)>0.0001
if abs(dphi2-dphi1)
t=alpha2-dphi2*(alpha2-alpha1)/(dphi2-dphi1);
alpha1=alpha2;
alpha2=t;
dphi1=g(x(:,k)+alpha1*d(:,k))'*d(:,k);
dphi2=g(x(:,k)+alpha2*d(:,k))'*d(:,k);
else
return
end
end
alpha(k)=alpha2;
x(:,k+1)=x(:,k)+alpha(k)*d(:,k);
d(:,k+1)=-g(x(:,k+1));
y(k+1)=f(x(:,k+1));
k=k+1;
else
while abs(dphi2)>0.0001
if abs(dphi2-dphi1)
t=alpha2-dphi2*(alpha2-alpha1)/(dphi2-dphi1);
alpha1=alpha2;
alpha2=t;
dphi1=g(x(:,k)+alpha1*d(:,k))'*d(:,k);
dphi2=g(x(:,k)+alpha2*d(:,k))'*d(:,k);
else
return
end
end
alpha(k)=alpha2;
x(:,k+1)=x(:,k)+alpha(k-1)*d(:,k);
d(:,k+1)=-g(x(:,k+1));
y(k+1)=f(x(:,k+1));
k=k+1;
end
end
semilogy((1:k),y,'r*')
xlabel '迭代次数'
ylabel '优化值'
title 'BB步下降法随迭代次数,函数值变化情况'
end测试函数为
该函数条件数很差,用最速下降法会产生锯齿效应,两步之间的函数值几乎不下降,效果如图
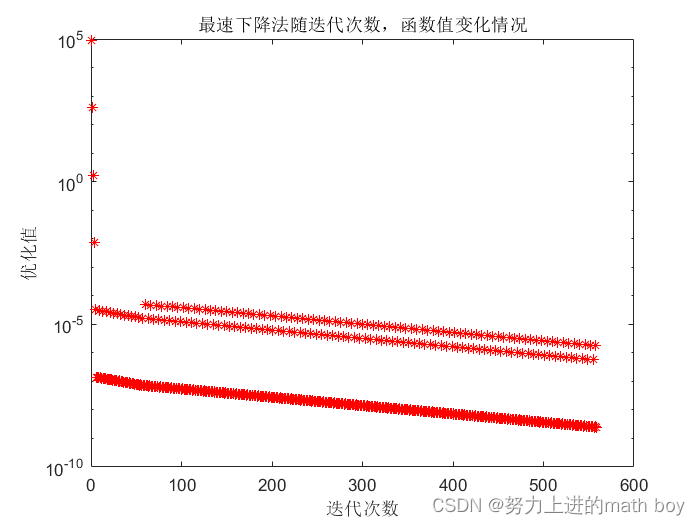
图4
而BB步在这种条件数下,收敛速度却很快,如图
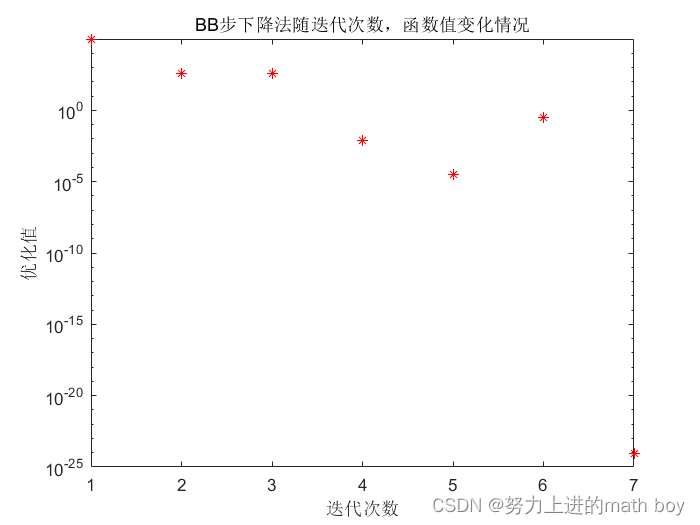
图5
3.步长固定梯度法
步长固定梯度法(Fixed Step Gradient Method)是另外一种梯度法的具体实现,在选择方向时与最速下降法已知,但省去了极小化步长的步骤,而是采用固定步长,这使得设计更为简单,计算复杂度更低。
3.1步长固定梯度法实现步骤
1. 给定和步长
;
2. 计算如果
,停止搜索;
4. 计算d;
5. k=k+1,转2.
3.2步长固定梯度法代码实现
function [x_last,y_last] = fsgd(f,g,x0,tolerance,alpha) %与最速下降法不同的是,该方法的alpha为固定步长
n=length(x0); %确定变量x0的维数
k=1; %用于计数
x=zeros(n,1); %设计x矩阵储存每次迭代的x近似值
d=zeros(n,1); %设计d矩阵储存每次迭代的梯度值
x(:,k)=x0;
d(:,k)=-g(x(:,k));
y(k)=f(x(:,k));
while norm(d(:,k))>=tolerance %当梯度范数不小于给定容忍值时,进入循环
x(:,k+1)=x(:,k)+alpha*d(:,k); %更新新的迭代点x
d(:,k+1)=-g(x(:,k+1)); %更新梯度信息
y(k+1)=f(x(:,k+1)); %更新新的函数值信息
k=k+1;
end
x_last=x(:,end);
semilogy((1:k),y,'r*')
xlabel '迭代次数'
ylabel '优化值'
title '步长固定梯度法随迭代次数,函数值变化情况'
y_last=y(:,end);
end
3.3性能测试
同最速下降法一样的测试函数,结果如图6
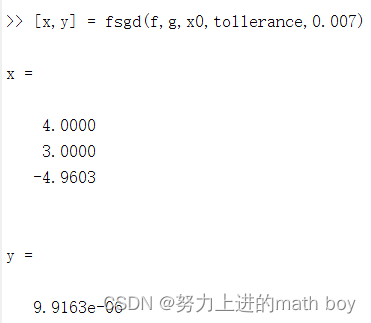
图6
可视化结果如图7
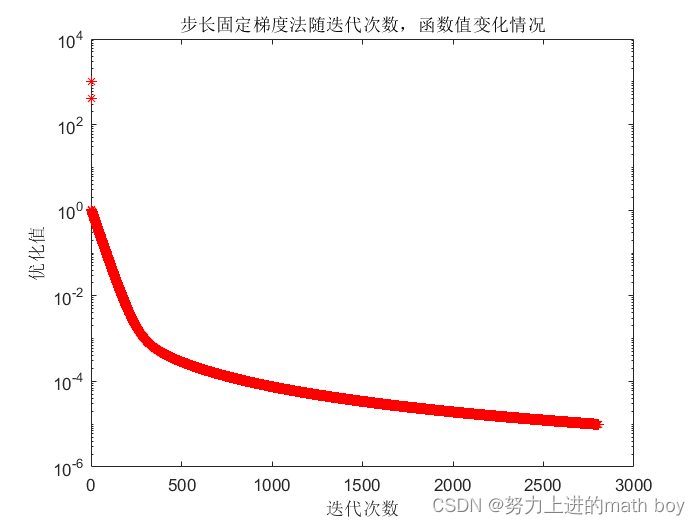
图7
可以看到,步长固定梯度法迭代次数远超过最速下降法,并且的值需要手工设置,只有设置到一定范围内,该方法才会收敛,在下文4部分会给到
具体的收敛范围。
4.梯度方法收敛定理
此处笔者证明思路采用Edwin.K.P.Chong与Stanislaw H.Zak著,孙志强译的《最优化导论(第四版)》,另外的证明思路可以参考袁亚湘老师著的《最优化理论与方法》,此书中利用康托洛维奇不等式证明了最速下降法全局收敛性,读者可自行查看书籍对照。首先给定二次型目标函数,将函数进行变形,便于讨论。即设函数
如下:
其中为函数
的极小值点,因此
相对于
仅相差一个常数,不影响极小值点位置,以此再给出引理2.1
引理4.1
迭代公式
满足
其中,。如果
;如果
证明手稿如图8
 图8
图8
由于,因此对于所有的
,都有
。如果
,那么
,此时
,即达到极小值点。这说明当且仅当
或
是矩阵
的特征向量(后续会给出证明,此处不证)时,
。
定理4.1
表示梯度方法产生的迭代点序列,
。
按照引理8.1中的方式定义,且假定对于所有
,都有
。那么,当且仅当
时,在任何初始值
下都收敛到极小值点
。
定理4.1证明如图9
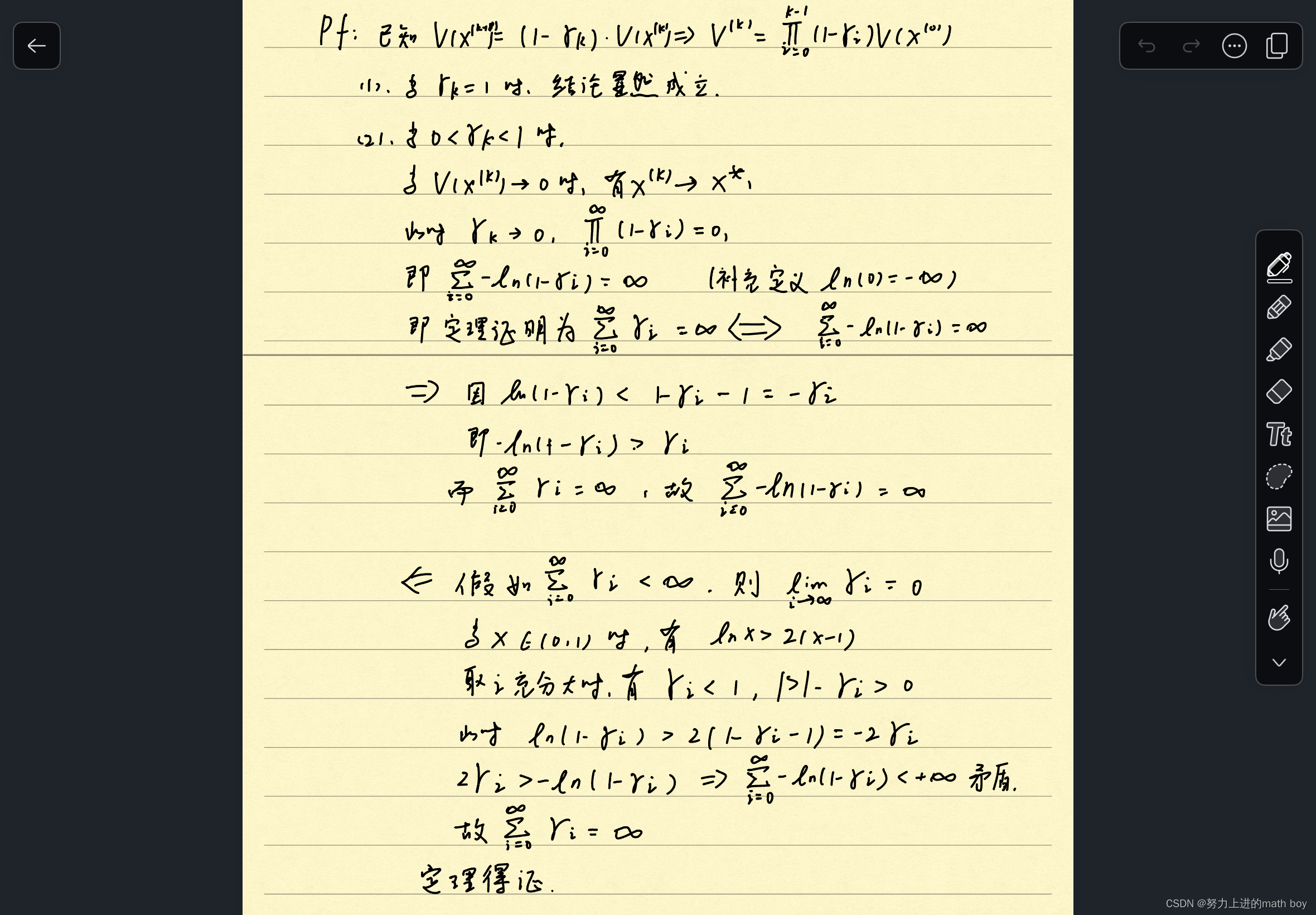
图9
定理4.1适用于所有以梯度下降方法产生的点列收敛判断,在随后的固定梯度下降法中的收敛性判定也是通过该定理来证明的。需要注意的是,定理中的假设十分重要,没有该假设定理4.1不成立。
在证明最速下降法收敛定理前引入瑞利不等式,对任意的,有
其中表示矩阵
的最小特征值,
为矩阵
的最大特征值。当
时,有
此时结合瑞利不等式,可以给出最速下降法的收敛定理。
最速下降法(SD)收敛定理
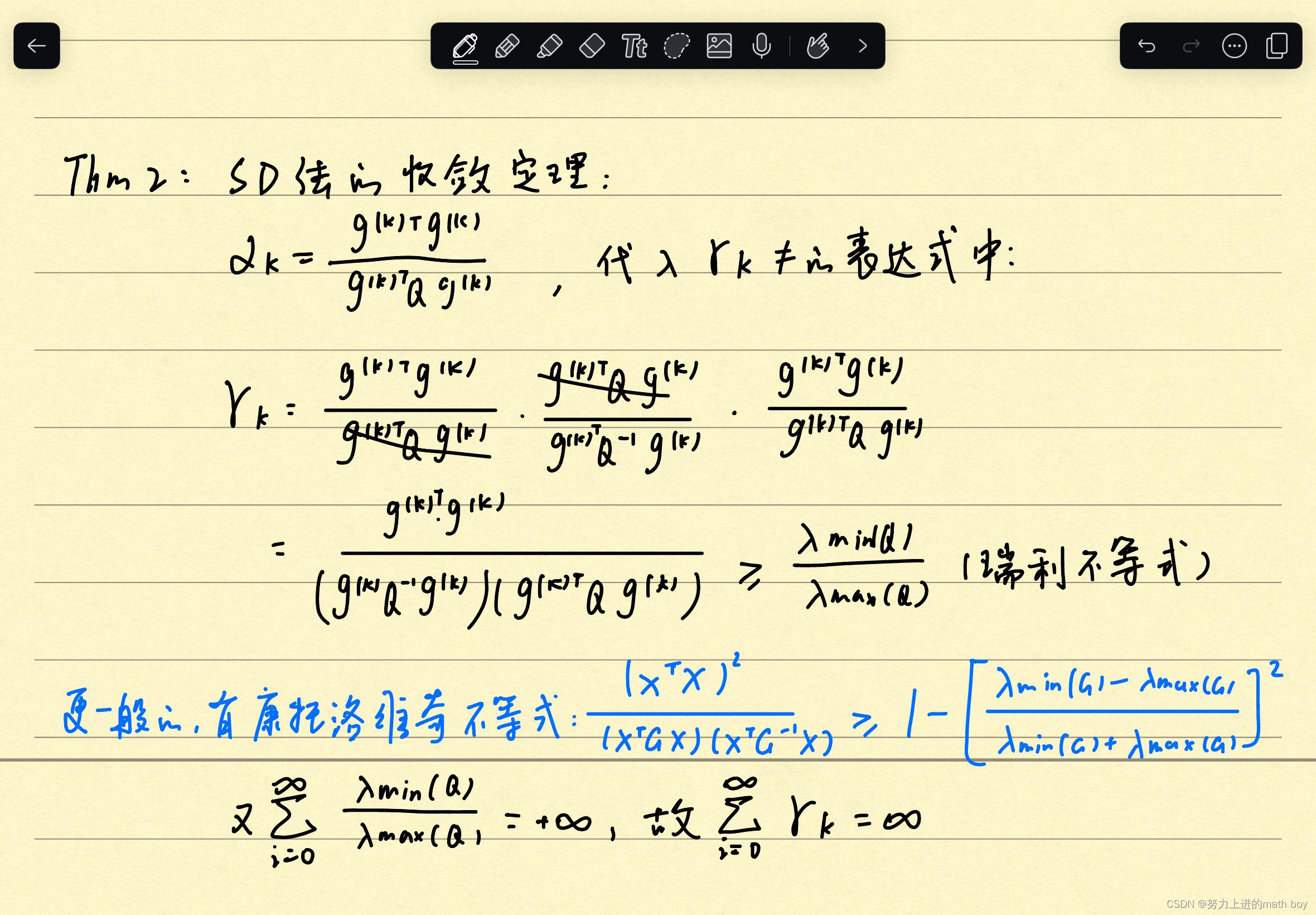
图10
由定理4.1可知,此时,最速下降法收敛。
再考虑固定步长的梯度下降法收敛性,因为该方法收敛性证明与最速下降法方法相同,故一同证明。在该方法中,对于所有,步长
,迭代公式为
固定步长的梯度法简单实用。由于步长固定,在每步迭代中,不需要开展一维搜索确定步长。但该方法的步长
也不是可以任意选取的,下面定理给出了固定步长的梯度下降法要收敛时,
必须要满足的充要条件。
步长固定下降法收敛定理
对于步长固定梯度法,当且仅当步长
时,。
证明如图9

图11
5.梯度方法收敛率
条件数定义
定义
收敛阶数定义
存在一个序列,能够收敛到
,即
。如果
则序列的收敛阶数为
,其中
。
序列收敛阶数是评价收敛方法快慢的指标,阶数越高,收敛速度越快,有时候也把阶数直接称为收敛率。
最速下降法的收敛率
利用最速下降法求解二次型函数的极小点,在任意第k次迭代,都有
证明如下:
在最速下降法收敛定理证明中,已经证明,因此
整理后可得
从上式可知,最速下降法至少是线性收敛的。并且当条件数很差的时候,即,此时
,最速下降法几乎不下降,从而收敛速度极慢。
6.总结
最速下降法与步长固定梯度下降法均为梯度下降法的具体实现,但二者的缺点很多。对最速下降法来说,它只关注眼前梯度信息,这与贪心算法思想类似,这使得它在条件数很差的情况下会出现锯齿效应,收敛速度很慢。而步长固定梯度下降法缺点更明显,它需要手动设置一个步长,
需要试验多次才能确定,并且收敛速度远远低于最速下降法,属于更差的一种优化方法。总而言之,二者都不具有实际应用的能力,需要做一些改进,或是找其他梯度下降法的具体实现来代替,下一章将叙述共轭方向法,共轭方向法是另一种极端,它在出发搜索之前就规划好所有搜索方向,而不管中途的任何信息,但由共轭方向法和最速下降法结合的共轭梯度法是非常不错的方法,许多工程优化问题都会基于共轭梯度法,下一章将作具体阐述。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









