







线性方程组求解实际意义:
线性方程组Ax=b的数值求解在实际生活中有重要意义,许多实际问题可归结为线性(代数)方程组机械设备、土建结构的受力分析;经济计划企业管理输电网络、管道系统的参数计算;大型的方程组需要有效的数值解法。本文就来简易介绍一下线性方程组常用的数值解法。
一、上三角线性方程组:
1.上三角线性方程组一般形式:
提取该方程的系数矩阵,可以得到一个上三角矩阵:
对于这样一个方程的解法,我们通常采用回代法来解决。值得注意的是,回代法的思路是解决一般线性方程组的前提,笔者接下来要介绍的高斯消元法和PLU分解法最后求解都要回归到求解上下三角形线性方程组的问题。在这里我们假设该矩阵是非奇异矩阵,因此对角线元素不等于零。
2.回代法的计算方法:
3.回代法代码实现部分:
function x=rebackword(A,b)
n=size(A,2);
x=zeros(n,1);
for k=n:-1:1
if k==n
x(n)=b(n)/A(n,n);
else
sum=0;
for i=k+1:n
sum=sum+A(k,i)*x(i);
end
x(k)=(b(k)-sum)/A(k,k);
end
end
end回代法的计算复杂度为
二、下三角线性方程组:
1.下三角线性方程组的一般形式:
同样提取该线性方程组的系数矩阵,记为:
对于该方程,我们使用前向替换法来解方程组,该过程实际上是回代法的反用
2.前向替换法的计算方法:
3.前向替换法的代码实现:
function x=F_S(A,b)
n=size(A,2);
x=zeros(n,1);
for k=1:n
if k==1
x(1)=b(1)/A(1,1);
else
sum=0;
for i=1:k-1
sum=sum+A(k,i)*x(i);
end
x(k)=(b(k)-sum)/A(k,k);
end
end
end前向替换法的计算复杂度与回代法相同,为
三、一般线性方程组:
1.高斯消元法:
给定一个一般的线性方程组:
我们要求解此线性方程组,可以考虑将其化为我们所熟悉的上三角矩阵,再用回代法求出解向量。先提取系数矩阵:
再写出其增广矩阵:
1.1.高斯消去法流程解释
对该增广矩阵做初等行变换,因为A为非奇异矩阵,最终可以化为上三角的形式,再用回代法求解。即对Ax=b的一般线性方程组,总是可以通过初等行变换变为Ux=y的形式,其中U为上三角矩阵。转化流程如下:
for r=p+1:n
m(r,p)=Abar(r,p)/Abar(p,p);
Abar(r,p)=0;
for c=p+1:n+1
Abar(r,c)=Abar(r,c)-mr*Abar(p,c);
end
end 对该代码流程的解释是:当进行到第p列时,用中的r行c列的元素减去p行c列元素乘以系数mr,同时将
r行p列元素变为零(因为该操作就是为了将r行p列元素变为零,所以用r行减去p行的mr倍)。经过有限步后,可以将其化为上三角矩阵。需要注意的是,当
的p行p列元素为零时,需要交换p行后的一个行k,使得k行p列元素非零。
1.2.选主元策略:
为什么要选主元:
避免对角线元素出现0的情况,导致不能通过乘以某一系数mr来消去对角线下方的元素。
误差传播方面,在使用高斯消元法时,总共需要次算术操作,当N=20时,总的算术操作次数为5910,因为计算机是按固定精度运算,这样计算过程中的误差传播将导致错误的结果。这时,偏序选主元策略、按比例偏序选主元策略或者平衡策略可以用来减少误差。下面来简单介绍一下偏序选主元策略和按比例偏序选主元策略,平衡策略在本文不详细展开,读者可自行查找。
1.2.1.偏序选主元策略
该选主元策略的目的在于将元素中的最大绝对值移到主对角线上,然后用该元素消去列中的元素,因为在进行初等行变换的时候,除数较大不容易出现计算误差,所以这样操作会减少误差传播。在高斯消元法前,应该检查位于主对角线和主对角线下方第p列的所有元素,确定行k,它的元素绝对值在所检查的列中最大,即:
如果k>p,则交换第k行和第p行,这样每个倍数的绝对值都小于1,这样就保证变换后的矩阵U与原矩阵A的对应元素的相对大小一致,导致更小的误差传播。
以下是偏序选主元策略的高斯消去法的代码实现:
偏序选主元策略代码实现:
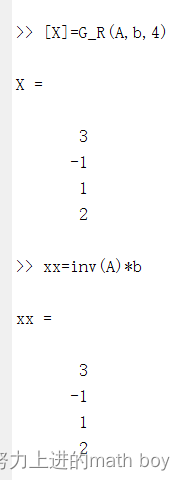
function [X]=G_R(A,b,n) %输入:系数矩阵A,常数矩阵b,n为系数矩阵A的阶数
AM=[A b];
for c=1:n
if max(AM(c:n,c))==0 %如果某一列所有元素都为零,为奇异矩阵,不可求逆,无解
disp('该矩阵是奇异矩阵');
return
end
k=find(abs(AM(c:n,c))==max(abs(AM(c:n,c)))); %找到c列中最大的元素的位置,记为k
k=k+c-1; %修正k的值,因为每次寻找只从c+1行开始寻找,找到的位置应该加c-1
if k~=c %如果k与c的值不相等,即矩阵c行不是最大值所在的行,则交换两行位置
t=AM(c,:);
AM(c,:)=AM(k,:);
AM(k,:)=t;
end
for r=c+1:n %消除c+1行以下的元素为零
mr=AM(r,c)/AM(c,c);
AM(r,c)=0;
for cc=c+1:n+1
AM(r,cc)=AM(r,cc)-mr*AM(c,cc); %运行到第r行时,将r行从c+1列开始的所有元素与第c行的c+1列元素乘以相应系数mr相减
end
end
end
U=AM(1:n,1:n); %将AM的n行n列内的所有元素记为U
Y=AM(:,n+1); %将AM的所有行n+1列的所有元素记为Y
X=zeros(n,1); %将解向量全部元素赋值0,则AX=b等价于UX=Y
for r=n:-1:1 %利用回代法计算解向量X的每一个值
if r==n
X(r,1)=Y(r,1)/U(r,r); %计算第解向量X的n行1列处的值
else
sum=0;
for rr=r+1:n
sum=sum+U(r,rr)*X(rr,1); %计算rr行到n行的解向量乘以r行rr列处对应系数
end
X(r)=(Y(r)-sum)/U(r,r); %计算解向量X中r行处的值
end
end
end测试效果
测试系数矩阵A:
测试常数项矩阵b:
测试结果:
1.2.2.按比例偏序选主元策略
该策略能够在计算中得出更小的误差,首先搜索位于主对角线和主对角线下方第p列的元素,其次元素满足在所在行中其绝对值相对最大。首先搜索第p行到第N行中绝对值最大的元素,称为:
再通过求下式确定第k行:
现在,交换第p行和第k行,除非p=k。这也是为了保证变换后的矩阵U与初始矩阵A的对应元素相对大小一致。
按比例偏序选主元策略:
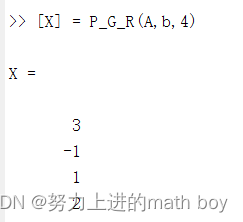
function [X] = P_G_R(A,b,n) %输入:系数矩阵A,常数矩阵b,n为系数矩阵A的阶数
AM=[A b]; %AM为增广矩阵
for c=1:n
if AM(:,c)==0
disp('该矩阵为奇异矩阵,不可逆');
return
else
s=zeros(1,n-c+1); %储存第c行到n行的所有每行中第c列的绝对值除以绝对值最大的元素,以方便按比例筛选
for r=c:n
s(1,r-c+1)=abs(AM(r,c))/max(abs(AM(r,c:n))); %s的每个值计算公式
end
k=find(abs(s)==max(s)); %找到s中最大值所在位置
k=k+c-1; %k的值应该加上c行之前的元素间隔
if k~=c %如果最大行的位置与c行不一样,进行初等行变换中的交换两行的操作
t=AM(c,:);
AM(c,:)=AM(k,:);
AM(k,:)=t;
end
for r=c+1:n %高斯消元法化为上三角矩阵
mr=AM(r,c)/AM(c,c); %mr是使得第c行c列元素乘以之后与第r行c列元素相减等于零的值
AM(r,c)=0;
for cc=c+1:n+1
AM(r,cc)=AM(r,cc)-mr*AM(c,cc); %将r行中的cc列元素减去第c行的cc列元素的一个倍数,倍数由mr决定
end
end
end
end
U=AM(1:n,1:n); %将AM的n行n列内的所有元素记为U
Y=AM(:,n+1); %将AM的所有行n+1列的所有元素记为Y
X=zeros(n,1); %将解向量全部元素赋值0,则AX=b等价于UX=Y
for r=n:-1:1 %利用回代法计算解向量X的每一个值
if r==n
X(r,1)=Y(r,1)/U(r,r); %计算第解向量X的n行1列处的值
else
sum=0;
for rr=r+1:n
sum=sum+U(r,rr)*X(rr,1); %计算rr行到n行的解向量乘以r行rr列处对应系数
end
X(r)=(Y(r)-sum)/U(r,r); %计算解向量X中r行处的值
end
end
end测试效果
测试系数矩阵A:
测试常数项矩阵b:
测试结果:
总的来说,高斯消元法是求解线性方程组的最基本算法,它的计算复杂度为,复杂度相对较高,而且在计算过程中的中间矩阵没有保存下来,这使得在科研过程中,科研人员更多地使用另一种数值算法,即下面即将介绍的三角分解法(PLU分解)。
2.PLU分解法:
2.1.PLU分解相对高斯消去法的优势
如总结所说,高斯消元法已经可以处理许多线性方程组了,但这个方法在实际中用得不多,原因在于计算复杂和没有保留中间矩阵以进一步研究矩阵性质。现在我们大致计算一下它的计算复杂度:
对循环
for c=1:n-1
...
r=c+1:n
mr=AM(r,c)/AM(c,c);
AM(r,c)=0;
for cc=r:n+1
AM(r,cc)=AM(r,cc)-mr*AM(c,cc);
...
对于c列来说,它需要进行n-c次除法来得到系数mr,在内循环里又需要进行n-r+2次减法和乘法的运算,所以需要循环:
次
这个求和得出来的n是的,计算复杂度相对较高。而用PLU分解法,在进行第一次矩阵分解的时候需要
次运算,在保存分解矩阵P,L,U后,仅换系数向量b而不改变A的情况下每次的运算只需要
次。并且可以通过P,L,U矩阵来研究系数矩阵A的性质,因此PLU分解法相比高斯消去法更常用。
2.2.PLU分解法原理
定理:如果A是非奇异矩阵,则存在一个置换矩阵P,使得PA存在三角分解:
其中P是由单位阵E经过有限次初等行变换中的交换变换得到的,L是主对角线元素全为1的下三角矩阵,U是主对角线不为零的上三角矩阵,形式如下:
注意这里只是给出P的其中一个可能形式,P的具体形式要根据给定的矩阵A来确定。
定理的具体证明可参考高等代数教材。
2.3.PLU分解的代码实现(带冒泡法排序选主元方法)
function [L,U,P]=P_L_U(A,n) %给入矩阵A,阶数n
P=eye(n); %初始化P为单位阵
for c=1:n
% 部分选主元,按冒泡法降序排列每个元素,使得绝对值最大的在最上方,绝对值最小的元素在最下方
for i=c:n %冒泡法循环
for j=c:n-i
if abs(A(j,c))<abs(A(j+1,c))
t=A(j,:);
A(j,:)=A(j+1,:);
A(j+1,:)=t;
t=P(j,:);
P(j,:)=P(j+1,:);
P(j+1,:)=t;
end
end
end
% 检查主元是否为零
if A(c,c) == 0
error('Matrix is singular or too close to singular for this algorithm.');
end
% 前向消元,将c列对角线以下的元素都消为零,即高斯消元法过程。
for r=c+1:n
mr=A(r,c)/A(c,c);
A(r,c)=mr;
A(r,c+1:end)=A(r,c+1:end)-mr*A(c,c+1:end);
end
end
% 构建上三角矩阵U,注意此时AM已经包含了行交换
U=A;
L=eye(n);
% 将U中L对应的部分置零,并且L继承U中置零部分
for i = 1:n
for j=1:i-1
L(i,j)=U(i,j);
U(i,j)=0;
end
end
end测试效果:
使用矩阵来进行测试
结果:
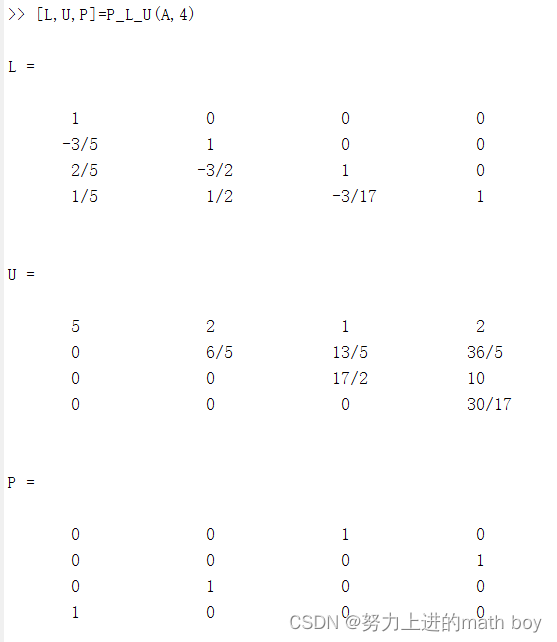
用来检测该三角分解是否正确,如图:
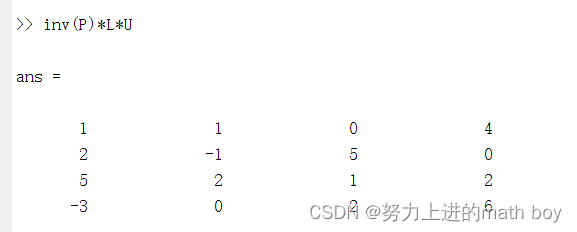
实际上,在matlab程序中,可以使用函数[L,U,P]=lu(A)来求得A的三角分解,也可以用lu函数与该函数比较,得出的结果一致。在这个程序中,我们实现将矩阵A进行三角分解成置换矩阵P,下三角矩阵L与上三角矩阵U,再进行一次前向替换法和回代法即可得到解X。推导过程如下:
令,得到表达式:
,通过前向替换法得到:
,最后由回代法求得:
基于三角分解法求解x的代码实现部分:
function x=T_B_S(P,L,U,b) %x是解向量,P是置换矩阵,L是下三角矩阵,U是上三角矩阵,b是系数向量。此代码用于求解经三角分解后的x向量值
n=length(b); %获取系数向量b的长度
xx=zeros(n,1); %构建x解向量的中间过程向量xx
y=P*b; %置换矩阵P*b得到新的系数向量y
x=xx;
for i=1:n %前向替换法,在前面代码中写过,不再解释
sum=0;
if i==1
xx(1,1)=y(1,1)/L(1,1);
else
for j=1:i-1
sum=sum+L(i,j)*xx(j,1);
end
xx(i,1)=(y(i,1)-sum)/L(i,i);
end
end
for i=n:-1:1 %回代法,在前面代码中写过,不再解释
sum=0;
if i==n
x(n,1)=xx(n,1)/U(n,n);
else
for j=i+1:n
sum=sum+U(i,j)*x(j,1);
end
x(i,1)=(xx(i,1)-sum)/U(i,i);
end
end
end 这样,通过PLU分解系数矩阵A,再利用前向替换法和回代法,可以求解出线性方程组的解。并且将矩阵A分解成一个上三角矩阵和下三角矩阵,若改变系数矩阵b,则不需要再重复高斯消元过程,节省了计算成本,也可以利用L和U矩阵来研究矩阵A的性质,故此方法更为广泛使用。同时指出,在MATLAB中,inv(A)和det(A)也利用三角分解法,例如,根据线性代数的理论,可以知道非奇异矩阵A的行列式等于,这里的U是矩阵A三角分解产生的上三角矩阵,而q是从单位矩阵E得到P所交换的行的次数。由于U是上三角矩阵,所以U的行列式是它的主对角线元素的乘积。
需要注意的是,Matlab的函数不允许改变给入参数的值,虽然代码充分利用给入矩阵A来进行储存矩阵L与U的值,但是实际上A原本的值并未改变,Matlab自动申请一个内存空间储存L与U的值,这造成了内存浪费,因此在用实际工程中使用三角分解时,最好用C或者Fotran来进行三角分解。
四、最后总结:
本文简要介绍了两种方法的原理和代码实现。线性方程组的一般解法思路是将系数矩阵,通过高斯消去法转化为一个上三角矩阵,最后利用回代法求解得出线性方程组的数值解。或者通过三角分解法,将系数矩阵转化为一个下三角矩阵和一个上三角矩阵相乘的形式。前者因为计算复杂度较高,每给出一个新的矩阵都会进行运算才能得出结果,后者仅第一次需要
次运算,当仅改变系数向量b而不改变A时,所需要的计算复杂度是
次,并且保留下来的矩阵L和U可以用来研究矩阵A的性质(如行列式或A的迹等),因此在实际研究中,三角分解法被应用得更多。















 7639
7639











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









