




内容:
使用solidworks绘制专利线条图
操作步骤
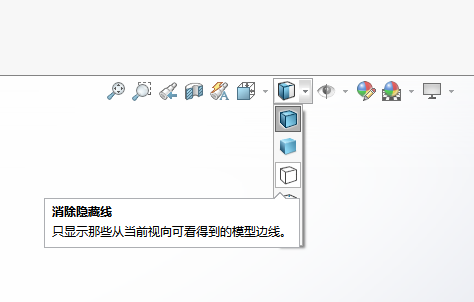
1、模型在软件中打开默认显示都是带边线上色
在顶部的显示类型中选择第三个“消除隐藏线”格式
修改前后的图片如下

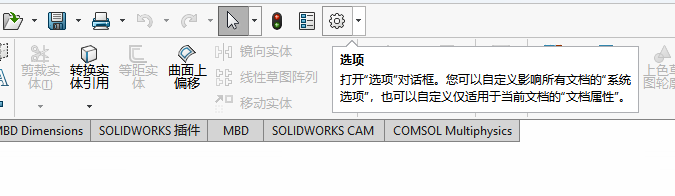
2、修改背景底色。
点击顶部的“选项”
选择“颜色”—>“素色”—>“视区背景”—>“颜色编辑”—>“选择白色”
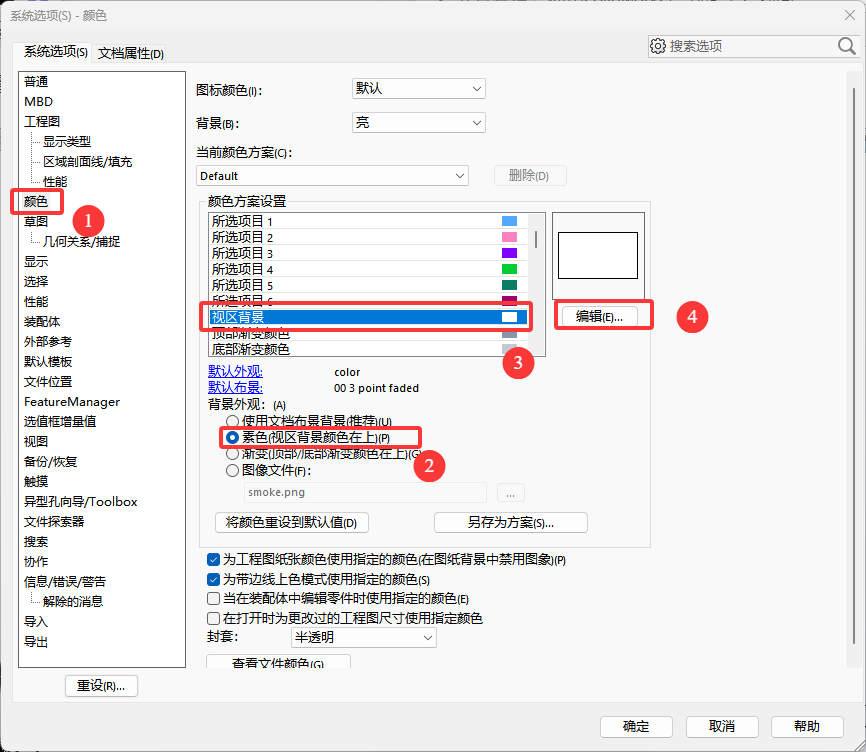
设置完之后的显示样式如下
3、在上面的设置完成后,有时候会出现一小段一小段的线条,显示不连续,这样需要再修改一下图像分辨率。
同样再次点击顶部的“选项”
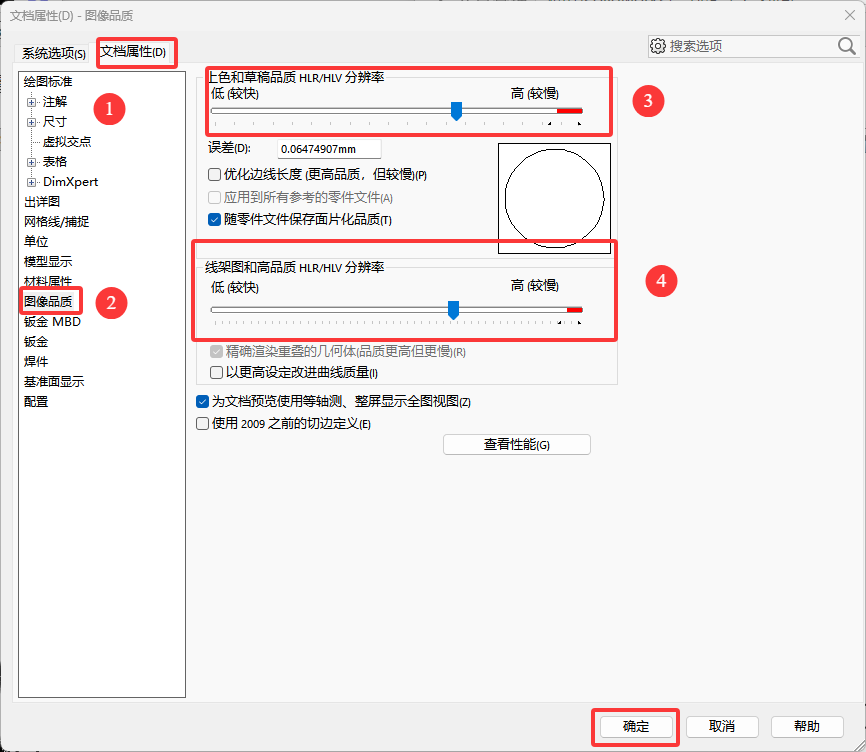
还有另外一个设置,选择切边不可见,选上后圆角的边线就可以滤掉

4、然后对模型选择一个合适的角度截图就可以了
绘制局剖图:
提示:局剖图要到工程图里面绘制,后面有时间写

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









