






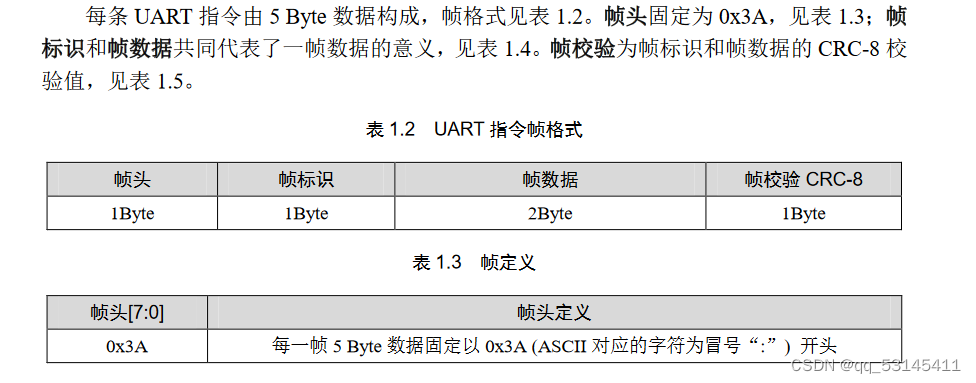
RS200 模块是广州立功科技股份有限公司推出的专门针对安防摄像头的智能雨刮模块。
RS200 模块安装在摄像头玻璃罩内表面,无需与外界接触即可精准检测玻璃罩外表面雨量大
小,并通过 UART 将雨量状态(无雨、小雨、中雨、大雨)发送给摄像头主机,摄像头主
机控制雨刮,刮掉玻璃罩外表面的雨滴,保证雨水环境下摄像头视野的持续清晰。


 接下来讲述如何通过SMT32F103C8T6通过串口,接收RS200的这些数据。
接下来讲述如何通过SMT32F103C8T6通过串口,接收RS200的这些数据。
首先,接线部分用的是刺破式端子线0.8-4P连接器电子线。连接C8T6的PA9,PA10。
C8T6有三个串口,也可以选择其他串口。

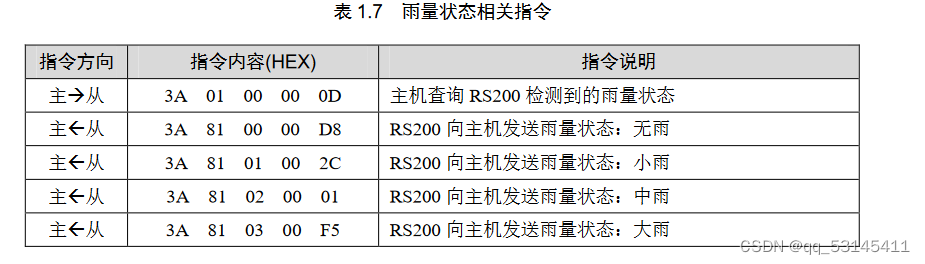
然后是根据数据手册修改串口接收的代码。帧头为0x3A,当串口接收到这个数据时,根据数据手册表1.7输出第三组数,1,2,3,表示小雨,中雨,大雨。或者接收为0x81,输出第二组数据。原理一样。
 代码根据原子哥的修改如下
代码根据原子哥的修改如下
u8 flag = 0,sign = 0,i=0;
u8 Res;
void USART1_IRQHandler(void) //串口1中断服务程序
{
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据 不要注释
if (Res==0x81&& sign ==0)
{
sign = 1;
flag = 0;
}
if(flag==0&&sign)
{
if(i<2)
{
USART1_RX_BUF[i++] = Res;
}
else
{
i=0;
flag =1;
}
}
// if((USART1_RX_STA&0x8000)==0)//接收未完成
// {
// if(USART1_RX_STA&0x4000)//接收到了0x0d
// {
// if(Res!=0x0a)USART1_RX_STA=0;//接收错误,重新开始
// else USART1_RX_STA|=0x8000; //接收完成了
// }
// else //还没收到0X0D
// {
// if(Res==0x0d)USART1_RX_STA|=0x4000;
// else
// {
// USART1_RX_BUF[USART1_RX_STA&0X3FFF]=Res ;
// USART1_RX_STA++;
// if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;//接收数据错误,重新开始接收
// }
// }
// }
}
主函数代码为
int main(void)
{
u8 i;
u8 a;
u16 times=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
uart1_init(115200); //初始化串口
usart_init2(115200);
LED_Init(); //初始化与LED连接的硬件接口
while(1)
{
if(flag==1)
{
for(i=1;i<2;i++)
a=USART1_RX_BUF[1];
sign =0;
}
printf("%d\r\n",a);
delay_ms(500);
}
}
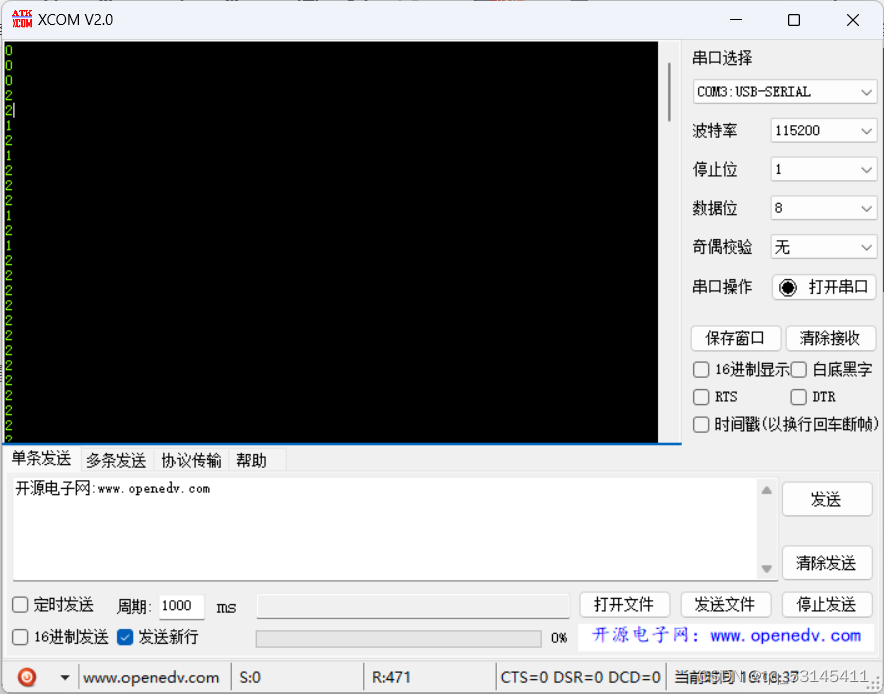
由于我使用的是串口1的PA9,PA10连接RS200,串口2的PA2,PA3我用来连接USB转TTL,将数据通过串口2输出。如下图。
 【实测RS200传感器模块是如何检测雨量的-哔哩哔哩】 https://b23.tv/NQ7VlON
【实测RS200传感器模块是如何检测雨量的-哔哩哔哩】 https://b23.tv/NQ7VlON
B站视频
注释有一些是原子哥的,我没改,代码有些乱,也有一些没有用,秉承着不报错就不改的原则。读者自行斟酌。
最后直接附上.C和.H文件,里面涉及到一些输入输出重定向,我就不讲了。
主函数上面已经贴过了。
.C文件
#include "sys.h"
#include "usart.h"
#include "stdarg.h"
#include "string.h"
#include "delay.h"
#include "stdio.h"
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //FreeRTOS使用
#endif
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART2->SR&0X40)==0);//循环发送,直到发送完毕
USART2->DR = (u8) ch;
return ch;
}
#endif
uint8_t USART2_TX_BUF[USART2_MAX_SEND_LEN]; //发送缓冲,最大USART2_MAX_SEND_LEN字节
void u1_printf(char *fmt, ...)
{
uint8_t i, j;
va_list ap;
va_start(ap, fmt);
vsprintf((char *)USART2_TX_BUF, fmt, ap);
va_end(ap);
i = strlen((const char *)USART2_TX_BUF); //此次发送数据的长度
for (j = 0; j < i; j++) //循环发送数据
{
while ((USART1->SR & 0X40) == 0)
; //循环发送,直到发送完毕
USART1->DR = USART2_TX_BUF[j];
}
}
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART1_RX_STA=0; //接收状态标记
void uart1_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
u8 flag = 0,sign = 0,i=0;
u8 Res;
void USART1_IRQHandler(void) //串口1中断服务程序
{
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据 不要注释
if (Res==0x81&& sign ==0)
{
sign = 1;
flag = 0;
}
if(flag==0&&sign)
{
if(i<2)
{
USART1_RX_BUF[i++] = Res;
}
else
{
i=0;
flag =1;
}
}
// if((USART1_RX_STA&0x8000)==0)//接收未完成
// {
// if(USART1_RX_STA&0x4000)//接收到了0x0d
// {
// if(Res!=0x0a)USART1_RX_STA=0;//接收错误,重新开始
// else USART1_RX_STA|=0x8000; //接收完成了
// }
// else //还没收到0X0D
// {
// if(Res==0x0d)USART1_RX_STA|=0x4000;
// else
// {
// USART1_RX_BUF[USART1_RX_STA&0X3FFF]=Res ;
// USART1_RX_STA++;
// if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;//接收数据错误,重新开始接收
// }
// }
// }
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
#endif
}
#endif
void esp8266_init(void)
{
printf("AT+RST\r\n"); //重启
delay_ms(3000);
printf("AT+CWMODE=1\r\n"); //Station模式
delay_ms(3000);
printf("AT+CWJAP=\"panda\",\"rongxingwei\"\r\n"); //连接热点
delay_ms(3000);
printf("AT+MQTTUSERCFG=0,1,\"NULL\",\"wiper3&a1y9MpTQVb2\",\"bfff72b8deca5f6929253328733c69c2c70ce1c18362e1ebe1ff450e16fe42ff\",0,0,\"\"\r\n");//用户信息配置
delay_ms(3000);
printf("AT+MQTTCLIENTID=0,\"a1y9MpTQVb2.wiper3|securemode=2\\,signmethod=hmacsha256\\,timestamp=1679646570542|\"\r\n");
delay_ms(3000);
printf("AT+MQTTCONN=0,\"a1y9MpTQVb2.iot-as-mqtt.cn-shanghai.aliyuncs.com\",1883,1\r\n"); //连接服务器
delay_ms(3000);
printf("AT+MQTTSUB=0,\"/sys/a1y9MpTQVb2/wiper3/thing/service/property/set\",1\r\n"); //订阅消息
delay_ms(3000);
}
/*===============================================================================================*/
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
/*================================================================================================*/
/*=======================================================串口二===========================================*/
#if EN_USART2_RX
void usart_init2(u32 bound)
{
GPIO_InitTypeDef GPIO_Init_Structure; //定义GPIO结构体
USART_InitTypeDef USART_Init_Structure; //定义串口结构体
NVIC_InitTypeDef NVIC_Init_Structure; //定义中断结构体
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); //开启USART1时钟
//配置PA2 TX
GPIO_Init_Structure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽
GPIO_Init_Structure.GPIO_Pin = USART2_TX_GPIO_PIN;
GPIO_Init_Structure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( USART2_GPIO_PORT, &GPIO_Init_Structure);
//配置PA3 RX
GPIO_Init_Structure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //复用推挽
GPIO_Init_Structure.GPIO_Pin = USART2_RX_GPIO_PIN;
GPIO_Init( USART2_GPIO_PORT, &GPIO_Init_Structure);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
USART_Init_Structure.USART_BaudRate = bound; //波特率设置为115200
USART_Init_Structure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制为无
USART_Init_Structure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式设为收和发
USART_Init_Structure.USART_Parity = USART_Parity_No; //无校验位
USART_Init_Structure.USART_StopBits = USART_StopBits_1; //一位停止位
USART_Init_Structure.USART_WordLength = USART_WordLength_8b; //字长为8位
USART_Init(USART2, &USART_Init_Structure);
USART_Cmd(USART2, ENABLE);
//中断结构体配置
NVIC_Init_Structure.NVIC_IRQChannel = USART2_IRQn;
NVIC_Init_Structure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init_Structure.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_Init_Structure.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_Init_Structure);
}
void USART2_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART2); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
#endif
/*==================================================串口三============================================== */
void USART3_SendData(uint8_t data)
{
while((USART3->SR & 0X40) == 0);
USART3->DR = data;
}
void USART3_SendString(uint8_t *DAT, uint8_t len)
{
uint8_t i;
for(i = 0; i < len; i++)
{
USART3_SendData(*DAT++);
}
}
#if EN_USART3_RX
uint8_t USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
uint16_t USART3_RX_STA = 0; //接收状态标记
void USART3_Init(uint32_t bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能USART3,GPIOC时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
//USART3_TX GPIOC.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIO
//USART3_RX GPIOC.11初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIO
//USART3 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3 ; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound; //串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //开启串口接受中断
USART_Cmd(USART3, ENABLE); //使能串口1
}
void USART3_IRQHandler(void) //串口1中断服务程序
{
uint8_t Res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
Res = USART_ReceiveData(USART3); //读取接收到的数据
}
}
#endif
.H文件
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 800 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
#define EN_USART2_RX 1 //使能(1)/禁止(0)串口1接收
#define USART1_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART1_RX_STA;
#define DEBUG_USARTx USART1
//串口1
#define USART1_GPIO_PORT GPIOA
#define USART1_GPIO_CLK RCC_APB2Periph_GPIOA
#define USART1_TX_GPIO_PIN GPIO_Pin_9
#define USART1_RX_GPIO_PIN GPIO_Pin_10
#define USART2_MAX_SEND_LEN 800 //最大发送缓存字节数
//串口2
#define USART2_GPIO_PORT GPIOA
#define USART2_GPIO_CLK RCC_APB2Periph_GPIOA
#define USART2_TX_GPIO_PIN GPIO_Pin_2
#define USART2_RX_GPIO_PIN GPIO_Pin_3
串口3
//#define USART3_GPIO_PORT GPIOB
//#define USART3_GPIO_CLK RCC_APB2Periph_GPIOB
//#define USART3_TX_GPIO_PIN GPIO_Pin_10
//#define USART3_RX_GPIO_PIN GPIO_Pin_11
//#define USART3_RX_EN 1 //0,不接收;1,接收.
//#define USART3_MAX_RECV_LEN 600 //最大接收缓存字节数
//extern vu16 USART3_RX_STA; //接收数据状态
//extern u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN字节
#define USART3_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART3_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 flag,sign;
extern u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART3_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void USART3_SendString(u8 *DAT,u8 len);
void USART3_SendData(u8 data);
void USART3_Init(u32 bound);
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
void usart_init2(u32 bound);
void usart_init3(u32 bound);
void uart1_init(u32 bound);
void u3_printf(char* fmt,...) ;
void USART_Send_Byte(USART_TypeDef* USARTx, uint16_t Data);
void USART_Send_String(USART_TypeDef* USARTx, char *str);
void esp8266_init(void);
extern uint8_t USART2_TX_BUF[USART2_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
void u1_printf(char *fmt, ...);
#endif


















 996
996

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











