







前言
阻尼牛顿法(Damped Newton’s method)是一种求解非线性优化问题的数值方法,用于求解函数的极小值。其步骤如下:
具体步骤如下:
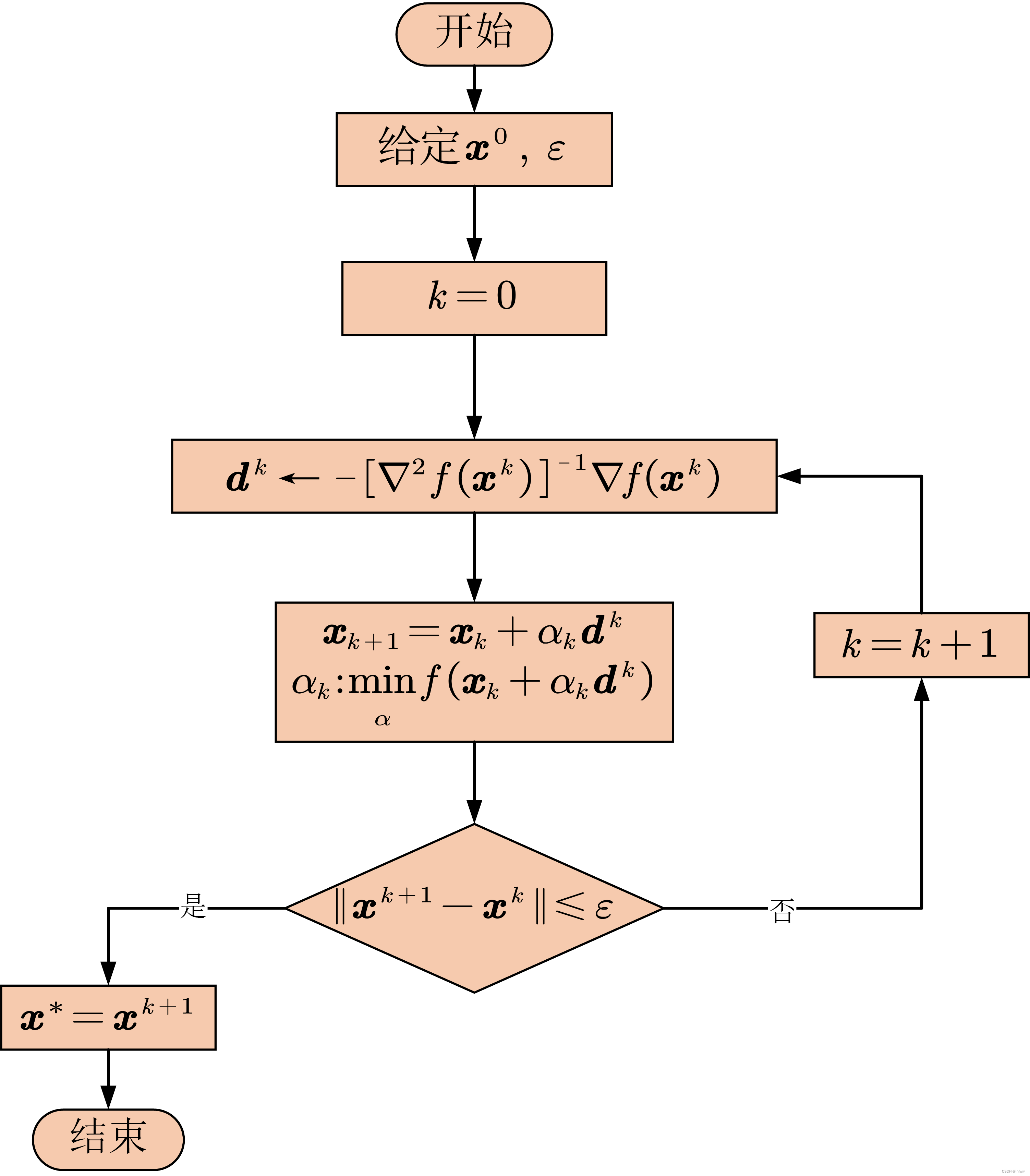
- 初始化:选择初始点 x 0 \boldsymbol{x^0} x0,以及允许误差 ε \varepsilon ε。
- 计算梯度:计算函数 f ( x k ) f(\boldsymbol x^k) f(xk)的梯度 ∇ f ( x k ) \nabla f(\boldsymbol x^k) ∇f(xk)和Hessian矩阵 H f ( x 0 ) H_f(\boldsymbol{x^0}) Hf(x0)。
- 求解线性方程:解线性方程 H f ( x 0 ) d k H_f(\boldsymbol{x^0})\boldsymbol d^k Hf(x0)dk=- ∇ f ( x k ) \nabla f(\boldsymbol x^k) ∇f(xk),其中 d k \boldsymbol d^k dk是搜索方向。
- 更新参数:更新参数 x k + 1 = x k + α k d k \boldsymbol{x}^{k+1}=\boldsymbol{x}^{k}+\alpha^k\boldsymbol d^k xk+1=xk+αkdk,其中 α k \alpha^k αk为最优迭代步长,满足 min α f ( x k + α d k ) \underset{\alpha}{\min}f\left( \boldsymbol{x}^{k}+\alpha \boldsymbol{d}^k \right) αminf(xk+αdk)。
- 判断收敛:如果 ∥ x k + 1 − x k ∥ ⩽ ε \left\| \boldsymbol{x}^{k+1}-\boldsymbol{x}^k \right\| \leqslant \varepsilon xk+1−xk ⩽ε 则停止迭代,否则令 k = k + 1 k=k+1 k=k+1,返回步骤2。
- 结果输出:输出最优解 x ∗ = x k + 1 \boldsymbol{x}^*=\boldsymbol{x}^{k+1} x∗=xk+1。
算法流程图
算法代码
下面代码以二维为例:
function [x_min, f_min] = NewtonMethod_Damping(f,x0,eps,N)
if nargin<2, x0 = [0,0]; end
if nargin<3, eps=1e-4; end
if nargin<4, N=100; end
syms x1 x2 a
f_fun = matlabFunction(f);
k = 0;
fprintf('阻尼牛顿法迭代开始(采用牛顿法进行一维搜索步长alpha):\n')
fprintf('函数f(x) = %s迭代开始:\n',f)
while true
k = k + 1;
hs = hessian(f); % 海塞矩阵
hs_x0 = double(subs(hs,[x1,x2],x0));
df = [diff(f,1,x1),diff(f,1,x2)]; % 梯度
df_x0 = subs(df,[x1,x2],x0);
dk = double(vpa(df_x0))/hs_x0;
x = x0 - a * dk;
% 求迭代步长
fa = f_fun(x(1),x(2));
a_value = Newton_minValue(fa); % 使用一维牛顿法求解最优迭代步长
x = subs(x,a,a_value);
fprintf('k=%2.d, x_k=[%7.4f, %7.4f]^T, x_k+1=[%7.4f, %7.4f]^T, alpha=%7.4f\n',...
k,x0(1),x0(2),x(1),x(2),a_value);
if norm(abs(x -x0),2) < eps
x_min = x;
f_min = f_fun(x(1),x(2));
fprintf(['已收敛!\nk=%2.d, x_k=[%7.4f, %7.4f]^T, x_min=x_k+1=[%7.4f, %7.4f]^T,' ...
' f_min=%8.4f\n'],k,x0(1),x0(2),x(1),x(2),f_min);
break
end
if k > N
x_min = x;
f_min = f_fun(x(1),x(2));
fprintf('超过最大迭代次数%N, 请调整容许误差或者最大迭代次数!\n',N)
break
end
x0 = x;
end
end
对于求解最优迭代步长,采用了一维牛顿法进行求解,具体可以看这篇文章。下面也给出一维牛顿法的程序代码:
function [x_star,f_star] = Newton_minValue(f_sym,x0,eps,N)
% f_sym为所求函数, 符号函数
% x0为初始点,默认为0
% eps为允许误差, 默认为1e-4
% N为最大迭代次数, 默认为500
if nargin < 2, x0 = 0; end
if nargin < 3, eps = 1e-4; end
if nargin < 4, N = 1000; end
f = matlabFunction(f_sym);
df = matlabFunction(diff(f_sym));
ddf = matlabFunction(diff(f_sym,2));
k = 0;
% fprintf('函数f=%s迭代开始:\n',f_sym)
while true
k = k + 1;
x1 = x0 - df(x0)/(ddf(x0));
% fprintf('k=%2.d, x0=%.4f, df=%9.4f, ddf=%9.4f, x1=%.4f\n',k,x0,df(x0),ddf(x0),x1)
if norm(abs(x1-x0),'fro')<eps
% fprintf('已收敛!结果如下:\nk=%2.d, x0=%.4f, x1=%.4f, f=%.4f',k,x0,x1,f(x1));
x_star = x1;
f_star = f(x_star);
break
end
if k > N
x_star = x1;
f_star = f(x_star);
fprintf('已经超出最大迭代次数%d!\n',N)
break
end
x0 = x1;
end
end
测试
测试函数如下:
syms x1 x2
f = (x1 - 2).^4 + (x1 - 2*x2).^2;
解析解
% 解析解
eqns = [diff(f,1,x1),diff(f,1,x2)];
[x1_min_true, x2_min_true] = solve(eqns,[x1,x2]);
x1_min_true = double(x1_min_true);
x2_min_true = double(x2_min_true);
| x1_min_true | x2_min_true |
|---|---|
| 2.0000 | 1.0000 |
算法解
eps = 1e-4;
x0 = [1,0];
[x_min_D, f_min_D] = NewtonMethod_Damping(f,x0,eps);
迭代过程如下:
阻尼牛顿法迭代开始(采用牛顿法进行一维搜索步长alpha):
函数f(x) = (x1 - 2*x2)^2 + (x1 - 2)^4迭代开始:
k= 1, x_k=[ 1.0000, 0.0000]^T, x_k+1=[ 1.3850, 0.7700]^T, alpha= 1.1551
k= 2, x_k=[ 1.3850, 0.7700]^T, x_k+1=[ 1.6921, 0.8074]^T, alpha= 1.4979
k= 3, x_k=[ 1.6921, 0.8074]^T, x_k+1=[ 1.8165, 0.9165]^T, alpha= 1.2127
k= 4, x_k=[ 1.8165, 0.9165]^T, x_k+1=[ 1.9030, 0.9481]^T, alpha= 1.4140
k= 5, x_k=[ 1.9030, 0.9481]^T, x_k+1=[ 1.9435, 0.9726]^T, alpha= 1.2524
k= 6, x_k=[ 1.9435, 0.9726]^T, x_k+1=[ 1.9693, 0.9843]^T, alpha= 1.3701
k= 7, x_k=[ 1.9693, 0.9843]^T, x_k+1=[ 1.9824, 0.9913]^T, alpha= 1.2778
k= 8, x_k=[ 1.9824, 0.9913]^T, x_k+1=[ 1.9903, 0.9951]^T, alpha= 1.3462
k= 9, x_k=[ 1.9903, 0.9951]^T, x_k+1=[ 1.9945, 0.9972]^T, alpha= 1.2932
k=10, x_k=[ 1.9945, 0.9972]^T, x_k+1=[ 1.9969, 0.9985]^T, alpha= 1.3329
k=11, x_k=[ 1.9969, 0.9985]^T, x_k+1=[ 1.9983, 0.9991]^T, alpha= 1.3024
k=12, x_k=[ 1.9983, 0.9991]^T, x_k+1=[ 1.9990, 0.9995]^T, alpha= 1.3254
k=13, x_k=[ 1.9990, 0.9995]^T, x_k+1=[ 1.9995, 0.9997]^T, alpha= 1.3078
k=14, x_k=[ 1.9995, 0.9997]^T, x_k+1=[ 1.9997, 0.9998]^T, alpha= 1.3211
k=15, x_k=[ 1.9997, 0.9998]^T, x_k+1=[ 1.9998, 0.9999]^T, alpha= 1.3110
k=16, x_k=[ 1.9998, 0.9999]^T, x_k+1=[ 1.9999, 1.0000]^T, alpha= 1.3187
已收敛!
k=16, x_k=[ 1.9998, 0.9999]^T, x_min=x_k+1=[ 1.9999, 1.0000]^T, f_min= 0.0000
总代码
clc;clear;close all
%%
syms x1 x2
f = (x1 - 2).^4 + (x1 - 2*x2).^2;
eqns = [diff(f,1,x1),diff(f,1,x2)];
[x1_min_true, x2_min_true] = solve(eqns,[x1,x2]);
x1_min_true = double(x1_min_true);
x2_min_true = double(x2_min_true);
eps = 1e-4;
x0 = [1,0];
[x_min_D, f_min_D] = NewtonMethod_Damping(f,x0,eps);
function [x_min, f_min] = NewtonMethod_Damping(f,x0,eps,N)
if nargin<2, x0 = [0,0]; end
if nargin<3, eps=1e-4; end
if nargin<4, N=100; end
syms x1 x2 a
f_fun = matlabFunction(f);
k = 0;
fprintf('阻尼牛顿法迭代开始(采用牛顿法进行一维搜索步长alpha):\n')
fprintf('函数f(x) = %s迭代开始:\n',f)
while true
k = k + 1;
hs = hessian(f); % 海塞矩阵
hs_x0 = double(subs(hs,[x1,x2],x0));
df = [diff(f,1,x1),diff(f,1,x2)]; % 梯度
df_x0 = subs(df,[x1,x2],x0);
dk = double(vpa(df_x0))/hs_x0;
x = x0 - a * dk;
% 求迭代步长
fa = f_fun(x(1),x(2));
a_value = Newton_minValue(fa); % 使用一维牛顿法求解最优迭代步长
x = subs(x,a,a_value);
fprintf('k=%2.d, x_k=[%7.4f, %7.4f]^T, x_k+1=[%7.4f, %7.4f]^T, alpha=%7.4f\n',...
k,x0(1),x0(2),x(1),x(2),a_value);
if norm(abs(x -x0),2) < eps
x_min = x;
f_min = f_fun(x(1),x(2));
fprintf(['已收敛!\nk=%2.d, x_k=[%7.4f, %7.4f]^T, x_min=x_k+1=[%7.4f, %7.4f]^T,' ...
' f_min=%8.4f\n'],k,x0(1),x0(2),x(1),x(2),f_min);
break
end
if k > N
x_min = x;
f_min = f_fun(x(1),x(2));
fprintf('超过最大迭代次数%N, 请调整容许误差或者最大迭代次数!\n',N)
break
end
x0 = x;
end
end
function [x_star,f_star] = Newton_minValue(f_sym,x0,eps,N)
% f_sym为所求函数, 符号函数
% x0为初始点,默认为0
% eps为允许误差, 默认为1e-4
% N为最大迭代次数, 默认为500
if nargin < 2, x0 = 0; end
if nargin < 3, eps = 1e-4; end
if nargin < 4, N = 1000; end
f = matlabFunction(f_sym);
df = matlabFunction(diff(f_sym));
ddf = matlabFunction(diff(f_sym,2));
k = 0;
% fprintf('函数f=%s迭代开始:\n',f_sym)
while true
k = k + 1;
x1 = x0 - df(x0)/(ddf(x0));
% fprintf('k=%2.d, x0=%.4f, df=%9.4f, ddf=%9.4f, x1=%.4f\n',k,x0,df(x0),ddf(x0),x1)
if norm(abs(x1-x0),'fro')<eps
% fprintf('已收敛!结果如下:\nk=%2.d, x0=%.4f, x1=%.4f, f=%.4f',k,x0,x1,f(x1));
x_star = x1;
f_star = f(x_star);
break
end
if k > N
x_star = x1;
f_star = f(x_star);
fprintf('已经超出最大迭代次数%d!\n',N)
break
end
x0 = x1;
end
end
总结
这只是一个基础的示例,实际中还会有更具体的、更细致的要求,这就需要再做额外调整;另外本人也仍在学习中,这只是个人的学习笔记,可能还有一些不足之处,欢迎指正。
参考文献
主编白清顺. 机械优化设计.第6版 [M]. 2017.
















 7264
7264











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











