






目录
1、需求分析
总体描述:
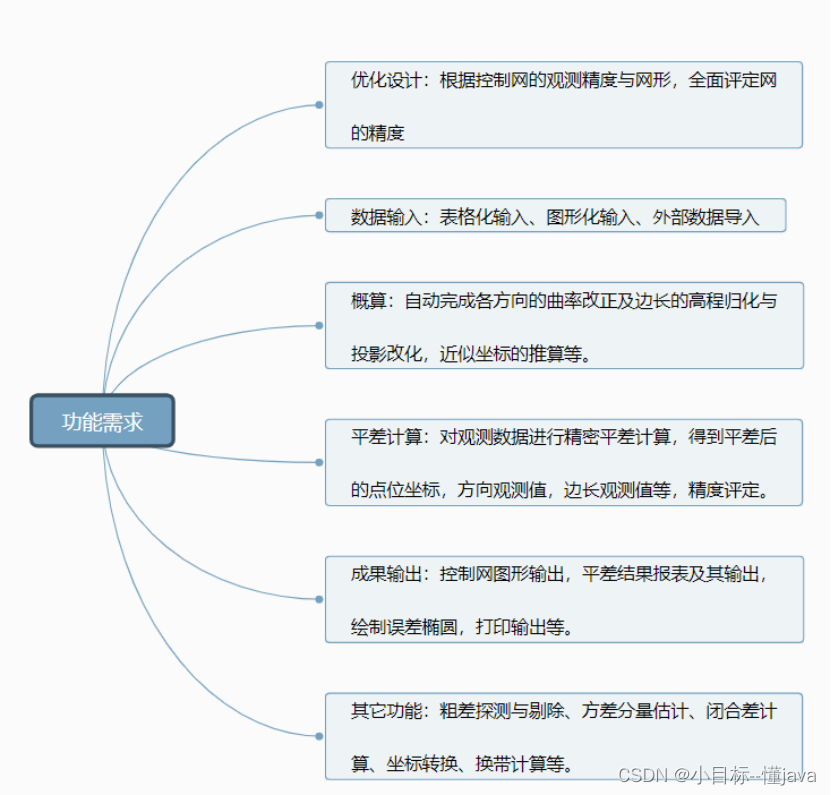
控制网平差程序对野外控制网观测数据进行平差数据处理,其目的就是根据最小二乘原理,消除网中的各种几何矛盾,求出全网各待定元素(未知点平面坐标或三维坐标)。
功能需求:
2、原理与系统设计
原理:
概算原理:

平差原理:
平差模型:最小二乘平差模型。
间接平差:一个观测值就是一个误差方程,占用内存相对较大,但易于编程解算,容易编制通用的程序。


系统设计:
类整体结构设计:

概算:
逐点解算法:选择已知点或已计算出坐标的点作为起算点,根据具体的图形,逐个推算出各点的坐标。
平差:

具体步骤:
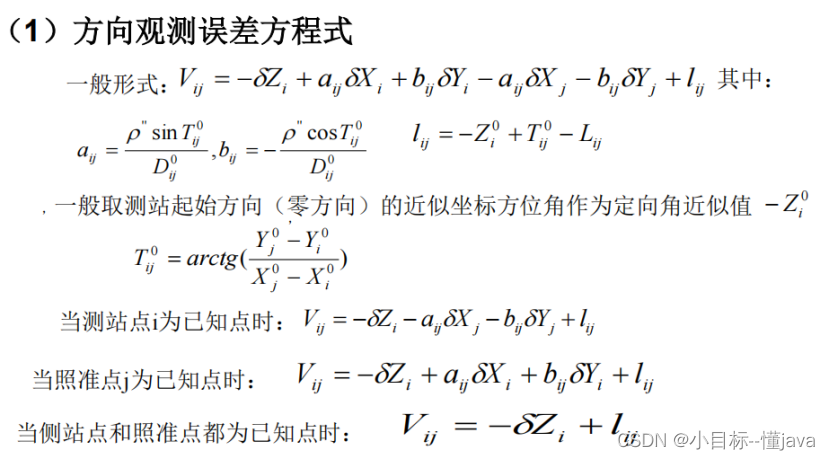
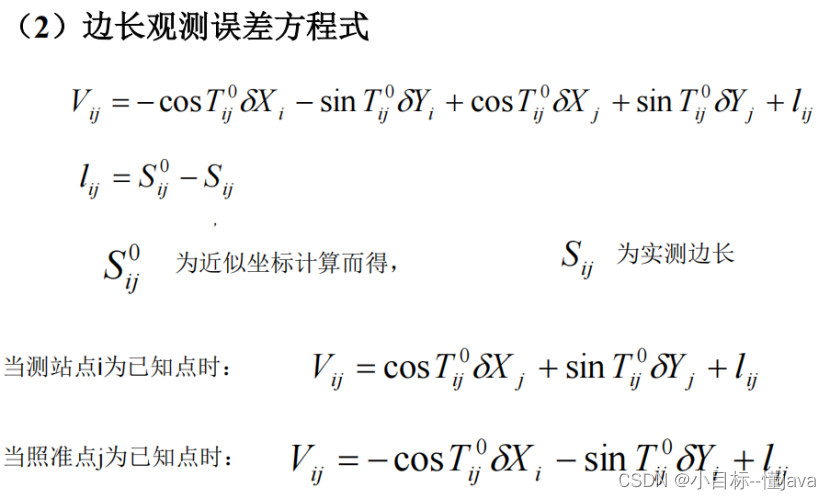
1、误差方程式及条件方程式的列立
2、定权
(1)方向观测值的权
在等精度方向观测的控制网中,可把方向观测值的权定为1,不同精度的观测网中,则选择其中一种作为单位权中误差u(单位:秒),其它方向观测值 中误差为m(单位:秒),则 。
。
(2)边长观测值的权

3、组成法方程

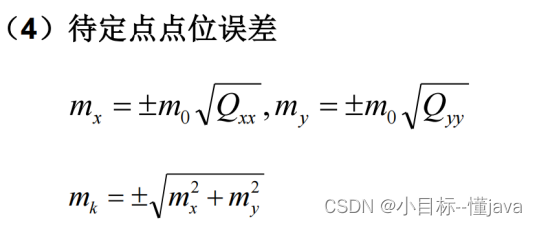
4、精度评定




3、测试结果与分析
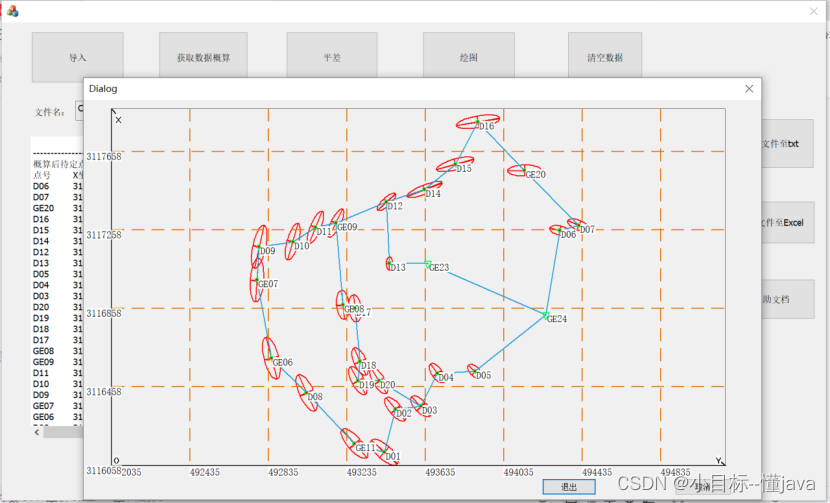
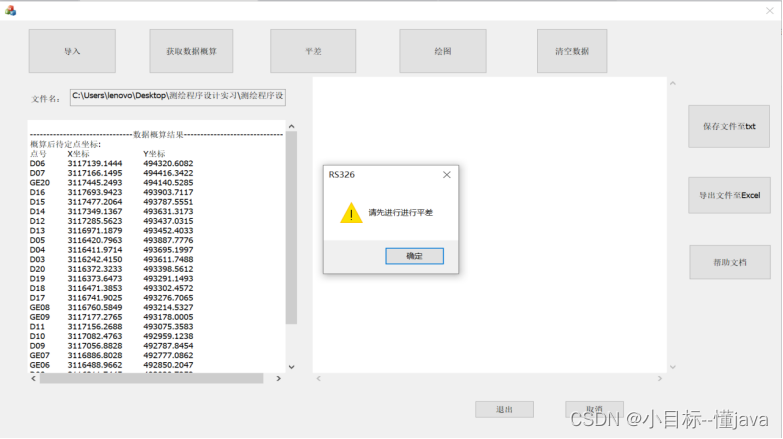
运行结果展示:

TXT:
鲁棒性检验:



4 、主要代码
Dataimport:
.h:
#pragma once
#include "Datapoint.h"
#include "Dataangle.h"
#include"Dataline.h"
#include "Matrix.h"
#include "CAngle.h"
class Dataimport
{
public:
Dataimport();
~Dataimport();
public:
Point* Psum;//点集
int Pcount;//点数
Line* Lsum;//边集
int Lcount;//边数
Angle* Asum;//测站集
int Acount;//测站数
Ang* Ansum;//观测角集
int ancount;//观测角数
int unk;//未知点数
CMatrix dLe;//B矩阵
CMatrix f;//F矩阵
CMatrix p1;//权矩阵
int t = 0;//递归次数
double m0;//单位权中误差
public:
int SplitStringArray(CString str, char c, CStringArray& array);//字符串分割
CString remove(CString str);//移除字符串中\r\n
double dms2d(double k);//度分秒转度
void read(CString&input,CString &input1);//数据读取和存入
void dealangle();//出来数据获取观测角
double p2azi(Point p1,Point p2);//计算方位角
int azimuth(CString p1);//查找点号
int azimuth1(CString p1, CString p2);//查找边号
void dofdeal();//数据概算
void output1(CString& output);//输出数据概算
void Do_adjustment();//平差计算
void output(CString &output);//输出平差结果
void Save(CString output);//输出到TXT
void Save1(CString output);//输出到EXcel
};.cpp:
#include "pch.h"
#include "Dataimport.h"
#include <clocale>
#include "math.h"
//构造和析构函数
Dataimport::Dataimport()
{
}
Dataimport::~Dataimport()
{
if (Psum != NULL) {
delete[] Psum;
Psum = NULL;
}
if (Asum != NULL) {
delete[] Asum;
Asum = NULL;
}
if (Lsum != NULL) {
delete[] Lsum;
Lsum = NULL;
}
if (Ansum != NULL) {
delete[] Ansum;
Ansum = NULL;
}
}
//字符串分割
int Dataimport::SplitStringArray(CString str, char c, CStringArray& array)
{
int start = 0;
int idx = str.Find(c, start);
array.RemoveAll();
while (idx != -1) {
CString stmp = str.Mid(start, idx - start);
array.Add(stmp);
start = idx + 1;
idx = str.Find(c, start);
}
CString stmp = str.Right(str.GetLength() - start);
if (!stmp.IsEmpty())
{
array.Add(stmp);
return array.GetSize();
}
}
//字符串处理去除\r\n
CString Dataimport::remove(CString str)
{
str.Remove('\r');
str.Remove('\n');
return str;
}
//度分秒转度
double Dataimport::dms2d(double k)
{
int a4;
double a2;
double a3;
a4 = int(k);
a2 = int((k - a4) * 100);
a3 = ((k - a4) * 100 - a2) * 100;
return double((a4 + a2 / 60 + a3 / 3600));
}
//数据读取分割存储
void Dataimport::read(CString& input, CString& input1)
{
CFileDialog dlgFile(TRUE, _T("txt"), NULL, OFN_EXPLORER, _T("(文本文件)|*.dat"));
if (dlgFile.DoModal() == IDCANCEL) return;
CString trFileName = dlgFile.GetPathName();
CStdioFile rfile;
if (!rfile.Open(trFileName, CFile::modeRead))AfxMessageBox(_T("文件未找到"));
CString buf = _T("");
CString bufer = _T("");
CString str1 = _T("**********");
int ind = 0;
while (rfile.ReadString(buf))
{
if (ind == 1)
{
bufer += buf + _T("\r\n");
}
if (remove(buf) == str1)
{
ind = 1;
}
}
if (ind==0)
{
AfxMessageBox(_T("输入数据格式不符合"));
return;
}
input1 = trFileName;
input = bufer;
CStringArray array;
SplitStringArray(bufer, '\r', array);
int Pc1 = _tstof(array[0]);
int Pc2 = _tstof(array[Pc1 + 1]);
Pcount = Pc1 + Pc2;
unk = Pc2;
Psum = new Point[Pcount];
for (int i = 0; i < Pc1; i++)
{
CStringArray buf1;
SplitStringArray(array[i + 1], ',', buf1);
CString a=buf1[0];
Psum[i].index = buf1[0];
Psum[i].x = _tstof(buf1[1]);
Psum[i].y = _tstof(buf1[2]);
Psum[i].flag = 0;
Psum[i].flag1 = 0;
}
CStringArray buf1;
SplitStringArray(array[Pc1 + 2], ',', buf1);
int m = 0;
for (int i = Pc1; i < Pcount; i++)
{
Psum[i].index = buf1[m];
Psum[i].x = 0;
Psum[i].y = 0;
Psum[i].flag = 1;
m++;
}
Lcount = _tstof(array[Pc1 + 3]);
Lsum = new Line[Lcount];
for (int i=0; i < Lcount; i++) {
CStringArray buf2;
SplitStringArray(array[Pc1 + 4+i], ',', buf2);
Lsum[i].start = buf2[0];
Lsum[i].end = buf2[1];
Lsum[i].length = _tstof(buf2[2]);
Lsum[i].amangle = 0;
}
Acount = _tstof(array[Pc1 + 4 + Lcount]);
Asum = new Angle[Acount];
int a = -1;
for (int i = 0; i < Acount; i++)
{
CStringArray buf2;
SplitStringArray(array[Pc1 + 5 +Lcount+ i], ',', buf2);
Asum[i].startP = buf2[0];
Asum[i].endP = buf2[1];
Asum[i].angle = _tstof(buf2[2]);
if (Asum[i].angle==0)
{
a++;
}
Asum[i].num = a;
}
}
//数据进一步处理
void Dataimport::dealangle()
{
//计算观测角个数实例化
ancount = 0;
for (int i = 0; i < Acount; i++)
{
if (Asum[i].angle != 0)ancount++;
}
Ansum = new Ang[ancount];
//赋值
int m = 0;
for (int i = 0; i < Acount; i++)
{
if (Asum[i].angle == 0)
{
int s = i;
while (Asum[i+1].angle != 0&&i+1<Acount)
{
Ansum[m].startP = Asum[s].endP;
Ansum[m].mid = Asum[s].startP;
Ansum[m].endP = Asum[i + 1].endP;
Ansum[m].angle = Asum[i + 1].angle;
m++;
i++;
}
}
}
}
void Dataimport::dealangle()
{
//计算观测角个数实例化
ancount = 0;
for (int i = 0; i < Acount; i++)
{
if (Asum[i].angle != 0)ancount++;
}
Ansum = new Ang[ancount];
//赋值
int m = 0;
for (int i = 0; i < Acount; i++)
{
if (Asum[i].angle == 0)
{
int s = i;
while (Asum[i+1].angle != 0&&i+1<Acount)
{
Ansum[m].startP = Asum[s].endP;
Ansum[m].mid = Asum[s].startP;
Ansum[m].endP = Asum[i + 1].endP;
Ansum[m].angle = Asum[i + 1].angle;
m++;
i++;
}
}
}
}
//两点求方位角
double Dataimport::p2azi(Point p1,Point p2)
{
int m = 0;
int n = 0;
//记录两点的下标
int a = 0;
int b = 0;
double d[10];
//查找边起始点是否为已知点
for (int j = 0; j < Pcount; j++)
{
if (remove(p1.index) == remove(Psum[j].index))
{
if (Psum[j].flag == 0)
{
m = 1;
a = j;
break;
}
}
}
//查找边终点是否为已知点
for (int j = 0; j < Pcount; j++)
{
if (remove(p2.index) == remove(Psum[j].index))
{
if (Psum[j].flag == 0)
{
n = 1;
b = j;
break;
}
}
}
//两点已知进行方位角计算
double ang;
if (m == n == 1) {
double dx = Psum[b].x - Psum[a].x;
double dy = Psum[b].y - Psum[a].y;
ang = atan(abs(dy / dx));
if (dx ==0&& dy == 0)return 0;
if (dy > 0 && dx < 0) { ang = acos(-1) - ang; }
if (dy < 0 && dx < 0) { ang = acos(-1) + ang; }
if (dy < 0 && dx > 0) { ang = 2 * acos(-1) - ang; }
}
else
{
ang = 0;
}
return ang;
}
//点号查找点下标
int Dataimport::azimuth(CString p1)
{
int a;
for (int j = 0; j < Pcount; j++)
{
if (remove(p1) == remove(Psum[j].index))
{
a = j;
return a;
}
}
return -1;
}
//两点号查找边下标
int Dataimport::azimuth1(CString p1, CString p2)
{
int d;
for (int j = 0; j < Lcount; j++)
{
if ((remove(p1) == remove(Lsum[j].start)) && (remove(p2) == remove(Lsum[j].end))) {
d = j;
return d;
}
if ((remove(p1) == remove(Lsum[j].end)) && (remove(p2) == remove(Lsum[j].start))) {
d = j;
return d;
}
}
return -1;
}
//数据概算
void Dataimport::dofdeal()
{
int sum = 0;
double d1[28];
double d2[28];
while (sum < Pcount)
{
sum = 0;
for (int i = 0; i < ancount; i++)
{
int m = 0; int n = 0;
int a, b,c,d=-1,e=-1;
a = azimuth(Ansum[i].startP);
b = azimuth(Ansum[i].mid);
c = azimuth(Ansum[i].endP);
d = azimuth1(Ansum[i].startP, Ansum[i].mid);
e = azimuth1(Ansum[i].mid, Ansum[i].endP);
int c1 = Psum[a].flag;
int c2 = Psum[b].flag;
int c3 = Psum[c].flag;
if (c2 == 0) {
if (c1==0&&c3==1)
{
double ang1 = p2azi(Psum[b], Psum[a]);
double length = 0;
length = Lsum[e].length;
if (e == -1) { length = 0; }
if (ang1 != 0 && length != 0)
{
double er = (dms2d(Ansum[i].angle) / 180) * acos(-1);
double ang = ang1 + (dms2d(Ansum[i].angle) / 180) * acos(-1) - 2 * acos(-1);
Psum[c].x = Psum[b].x + length * cos(ang);
Psum[c].y = Psum[b].y + length * sin(ang);
Psum[c].flag = 0;
Lsum[e].amangle = ang;
double ad = cos(ang);
d2[c] = Psum[c].x;
}
}
if (c1 == 1&& c3 ==0)
{
double ang1 = p2azi(Psum[b], Psum[c]);
double length = 0;
length = Lsum[d].length;
if (d == -1) { length = 0; }
if (ang1 != 0 && length != 0)
{
double er = (dms2d(Ansum[i].angle) / 180) * acos(-1);
double ang = ang1 - (dms2d(Ansum[i].angle) / 180) * acos(-1) + 2 * acos(-1);
Psum[a].x = Psum[b].x + length * cos(ang);
Psum[a].y = Psum[b].y + length * sin(ang);
Psum[a].flag = 0;
Lsum[d].amangle = ang;
double ad = cos(ang);
d2[a] = Psum[a].x;
}
}
if (c1 == 1 && c3 == 1)break;
}
}
//统计已知坐标点数
for (int k = 0; k < Pcount; k++)
{
if (Psum[k].flag == 0)sum++;
d1[k] = Psum[k].x;
}
}
}
//数据概算输出
void Dataimport::output1(CString& output)
{
output = _T("");
CString strOut;
strOut.Format(_T("\r\n-------------------------------数据概算结果---------------------------------\r"));
output += strOut;
strOut.Format(_T("\r\n概算后待定点坐标:\r\n"));
output += strOut;
strOut.Format(_T("点号\tX坐标\t\tY坐标\r\n"));
output += strOut;
for (int i = 2; i < Pcount; i++)
{
strOut.Format(_T("%s\t%.4f\t%.4f\r\n"), Psum[i].index, Psum[i].x, Psum[i].y);
output += strOut;
}
}
//平差计算
void Dataimport::Do_adjustment()
{
//平差
t = 0;
double sum = 0;//改正数平均差值
int Ncount = -ancount + Acount;
CMatrix x;//改正数矩阵
x.SetSize(unk * 2 + Ncount, 1);
CMatrix Nbb;
CMatrix f1;
/
do
{
//方向观测误差方程
dLe.SetSize(Acount+Lcount, unk*2+Ncount);
f.SetSize(Acount + Lcount, 1);
int p = 206265;
for (int i = 0; i < Acount; i++)
{
int m = 0;
int n = 0;
int a, b,c,d;
a = azimuth(Asum[i].startP);
b = azimuth(Asum[i].endP);
c = azimuth1(Psum[a].index, Psum[b].index);
double length;
if (c==-1) {
length = sqrt((Psum[a].x- Psum[b].x) * (Psum[a].x - Psum[b].x) + (Psum[a].y- Psum[b].y) * (Psum[a].y - Psum[b].y));
}
else
{
length = Lsum[c].length;
}
//查看是否为控制点
if (Psum[a].flag1 == 0){m = 1;}
if (Psum[b].flag1 == 0){n = 1;}
if ((m == 1 && n == 1))
{
dLe(i, unk * 2 + Asum[i].num) = 0;
f(i,0) = 0;
}
if (m == 1 && n == 0)
{
double a1, b1;
double ang = p2azi(Psum[a], Psum[b]);
double ang1=0;
for (int k = 0; k < Acount; k++)
{
if (Asum[i].num == Asum[k].num) {
int po1 = azimuth(Asum[k].startP);
int po2 = azimuth(Asum[k].endP);
ang1= p2azi(Psum[po1],Psum[po2]);
break;
}
}
a1 = p * sin(ang) /length;
b1 =- p * cos(ang) /length;
dLe(i, (b - 2) * 2) = -a1;
dLe(i, (b - 2) * 2+1) = -b1;
dLe(i, unk * 2 + Asum[i].num) = -1;
double ang2 = 0;
ang2 = ang - ang1;
if ((ang - ang1)<0)
{
ang2 = ang2 + 2 * acos(-1);
}
double d_angle = ang2 - (dms2d(Asum[i].angle) / 180) * acos(-1);
double dd = (dms2d(Asum[i].angle) / 180) * acos(-1);
f(i, 0) =d_angle*p;
}
if (m == 0 && n == 1)
{
double a1, b1;
double ang = p2azi(Psum[a], Psum[b]);
double ang1 = 0;
for (int k = 0; k < Acount; k++)
{
if (Asum[i].num == Asum[k].num) {
int po1 = azimuth(Asum[k].startP);
int po2 = azimuth(Asum[k].endP);
ang1 = p2azi(Psum[po1], Psum[po2]);
break;
}
}
a1 = p * sin(ang) / length;
b1 = -p * cos(ang) / length;
dLe(i, (a - 2) * 2) = a1;
dLe(i, (a - 2) * 2 + 1) = b1;
dLe(i, unk * 2 + Asum[i].num) = -1;
double ang2 = 0;
ang2 = ang - ang1;
if ((ang - ang1) < 0)
{
ang2 = ang2 + 2 * acos(-1);
}
double d_angle = ang2 - (dms2d(Asum[i].angle) / 180) * acos(-1);
f(i, 0) = d_angle * p;
}
if (m == 0 && n == 0)
{
double a1, b1;
double ang = p2azi(Psum[a], Psum[b]);
double ang1 = 0;
for (int k = 0; k < Acount; k++)
{
if (Asum[i].num == Asum[k].num) {
int po1 = azimuth(Asum[k].startP);
int po2 = azimuth(Asum[k].endP);
ang1 = p2azi(Psum[po1], Psum[po2]);
break;
}
}
a1 = p * sin(ang) / length;
b1 = -p * cos(ang) / length;
dLe(i, (b - 2) * 2) = -a1;
dLe(i, (b - 2) * 2 + 1) = -b1;
dLe(i, (a - 2) * 2) = a1;
dLe(i, (a - 2) * 2 + 1) = b1;
dLe(i, unk * 2 + Asum[i].num) = -1;
double ang2 = 0;
ang2 = ang - ang1;
if ((ang - ang1) < 0)
{
ang2 = ang2 + 2 * acos(-1);
}
double d_angle = ang2 - (dms2d(Asum[i].angle) / 180) * acos(-1);
f(i, 0) = d_angle * p;
double dc = f(i, 0);
}
}
//边长观测误差
for (int i = Acount; i < Lcount+Acount; i++)
{
int m =0, n = 0;
int a, b;
a = azimuth(Lsum[i-Acount].start);
b = azimuth(Lsum[i-Acount].end);
if (Psum[a].flag1 == 0)
{
m = 1;
}
if (Psum[b].flag1 == 0)
{
n = 1;
}
double a1, b1,s;
double ang = p2azi(Psum[a], Psum[b]);
a1 = sin(ang);
b1 = cos(ang);
s = sqrt((Psum[a].x- Psum[b].x) * (Psum[a].x - Psum[b].x) + (Psum[a].y - Psum[b].y) * (Psum[a].y - Psum[b].y));
//
if (m == 1 && n == 1) {
f( i, 0) = s - Lsum[i-Acount].length;
}
if (m == 0 && n == 0) {
dLe(i, (a - 2) * 2) = -b1;
dLe(i, (a - 2) * 2 + 1) = -a1;
dLe(i, (b - 2) * 2) = b1;
dLe(i, (b - 2) * 2 + 1) = a1;
f(i, 0) = s - Lsum[i - Acount].length;
}
if (m == 1 && n == 0) {
dLe(i, (b - 2) * 2) = b1;
dLe(i, (b - 2) * 2 + 1) = a1;
f( i, 0) = s - Lsum[i - Acount].length;
}
if (m == 0 && n == 1) {
dLe(i, (a - 2) * 2) = -b1;
dLe(i, (a - 2) * 2 + 1) = -a1;
f( i, 0) = s - Lsum[i - Acount].length;
}
}
CString pp1 = dLe.look();
CString pp2 = f.look();
//权矩阵
p1.SetSize(Acount + Lcount, Acount + Lcount);
for (int i = 0; i < Acount; i++)
{
p1(i, i) = 1;
}
for (int i = Acount; i < Acount+Lcount; i++)
{
p1(i, i) = 100000000/Lsum[i-Acount].length;
}
CString pp3 = p1.look();
//
f1 = -1*f;
Nbb= (~dLe * p1 * dLe).Inv();
x=Nbb*(~dLe*p1*f1);
sum = 0;
for (int i = 0; i <(Pcount-2)*2-1; i++)
{
if (abs(x(i,0))<abs(x(i+1,0)))
{
sum =abs( x(i+1, 0));
}
}
for (int k = 2; k < Pcount; k++)
{
Psum[k].x = Psum[k].x+x(2*(k-2), 0);
Psum[k].y = Psum[k].y+x(2*(k-2)+1, 0);
}
double df2[80];
for (int i = 0; i < x.Row(); i++)
{
df2[i] = x(i, 0);
}
for (int i = 0; i < x.Row(); i++)
{
x(i, 0) = 0;
}
t++;
} while (sum>0.0000001);
double df3[28];
for (int i = 0; i <Pcount; i++)
{
df3[i] = Psum[i].x;
}
//精度评定
CMatrix vpv = ~f1 * p1 * f1 - ~f1 * p1 * dLe * x;
double vpv1 = vpv(0, 0);
m0 =sqrt( vpv1 / (Acount + Lcount - 2 * unk));
CMatrix Qx = Nbb;
for (int i = 0; i < Pcount-2; i++)
{
//待定点点位误差
Psum[i+2].mx = m0 * sqrt(Qx(2 * i, 2 * i));
Psum[i+2].my = m0 * sqrt(Qx(2 * i + 1, 2 * i + 1));
Psum[i+2].mk = m0 * sqrt(Psum[i+2].mx * Psum[i+2].mx + Psum[i+2].my * Psum[i+2].my);
//误差椭圆参数计算
Psum[i+2].Q = 0.5 * atan(2 * Qx(2 * i, 2 * i + 1) / (Qx(2 * i, 2 * i) - Qx(2 * i + 1, 2 * i + 1)));
Psum[i+2].E = m0 * sqrt(Qx(2 * i, 2 * i) + Qx(2 * i, 2 * i + 1) * tan(Psum[i+2].Q));
Psum[i+2].F = m0 * sqrt(Qx(2 * i, 2 * i) + Qx(2 * i, 2 * i + 1) * tan(Psum[i+2].Q + acos(-1) / 2));
}
}
//平差结果输出
void Dataimport::output(CString &output)
{
CString strOut;
strOut.Format(_T("\r\n-------------------------------------------------平差结果-------------------------------------------------\r"));
output += strOut;
strOut.Format(_T("\r\n平差迭代次数:%d\r"), t);
output += strOut;
strOut.Format(_T("\r\n平差单位权中误差:%.8f\r"), m0);
output += strOut;
strOut.Format(_T("\r\n平差后系数阵B的元素:\r\n"));
output += strOut;
for (int i = 0; i <dLe.Row(); i++)
{
for (int j = 0; j < dLe.Col(); j++)
{
strOut.Format(_T("%-10.4f\t"), dLe(i, j));
output += strOut;
}
strOut.Format(_T("\r\n"));
output += strOut;
}
strOut.Format(_T("\r\n\n平差后常数阵F的元素:\r\n"));
output += strOut;
for (int i = 0; i < f.Row(); i++)
{
for (int j = 0; j < f.Col(); j++)
{
if (i < Acount)
{
strOut.Format(_T("%.6f\t"), f(i, j));
output += strOut;
}
else
{
strOut.Format(_T("%.6f\t"), f(i, j));
output += strOut;
}
}
strOut.Format(_T("\r\n"));
output += strOut;
}
strOut.Format(_T("\r\n\n平差后常数阵P的元素:\r\n"));
output += strOut;
for (int i = 0; i < p1.Row(); i++)
{
strOut.Format(_T("%.6f\t\t"), p1(i, i));
output += strOut;
strOut.Format(_T(""));
output += strOut;
}
strOut.Format(_T("\r\n平差后待定点坐标:\r\n"));
output += strOut;
strOut.Format(_T("点号\tX坐标\t\tY坐标\r\n"));
output += strOut;
for (int i = 2; i < Pcount; i++)
{
strOut.Format(_T("%s\t%.4f\t%.4f\r\n"), Psum[i].index, Psum[i].x, Psum[i].y);
output += strOut;
}
strOut.Format(_T("\r\n待定点点位误差及误差椭圆参数:\r\n"));
output += strOut;
strOut.Format(_T("点号\tmx\t\tmy\t\tmk\t\t长半径方位角Q\t\t长半径E\t\t短半径F\r\n"));
output += strOut;
for (int i = 2; i < Pcount; i++)
{
strOut.Format(_T("%s\t%.10f\t%.10f\t%.10f\t%.10f\t\t%.10f\t%.10f\r\n"), Psum[i].index, Psum[i].mx, Psum[i].my, Psum[i].mk, Psum[i].Q, Psum[i].E, Psum[i].F);
output += strOut;
}
}
//文件保存txt
void Dataimport::Save(CString output)
{
if (output == _T("")) { AfxMessageBox(_T("请先输入数据!")); }
else {
CFileDialog dlg(false, NULL, NULL, OFN_HIDEREADONLY | OFN_OVERWRITEPROMPT, _T("Txt Files(*.txt)|*.txt|All Files(*.*)|*.*|"), AfxGetMainWnd());
CString strPath;
if (dlg.DoModal() == IDCANCEL) return;
else
{
strPath = dlg.GetPathName();
if (strPath.Find(_T(".txt")) < 0)
{
if (strPath.Find(_T(".dat")) < 0)
{
strPath += _T(".txt");//默认储存为txt模式
}
}
}
TRY
{
CString cs;
CStdioFile file(strPath, CFile::shareExclusive | CFile::modeWrite | CFile::modeCreate);
setlocale(LC_CTYPE, ("chs")); //设置中文输出
file.WriteString(output);
file.Close();
CString temp;
temp.Format(_T("%s%s"), _T("已导出至"),strPath);
AfxMessageBox(temp);
}
CATCH_ALL(e)
{
e->ReportError();
return;
}
END_CATCH_ALL
}
}
//文件保存Excel
void Dataimport::Save1(CString output)
{
if (output == _T("")) { AfxMessageBox(_T("请先输入数据!")); }
else {
CString strPath;
CFileDialog dlg(false, NULL, NULL, OFN_HIDEREADONLY | OFN_OVERWRITEPROMPT, _T("Excel Files(*.xls)|*.xls|All Files(*.*)|*.*|"), AfxGetMainWnd());
if (dlg.DoModal() == IDCANCEL) return;
else
{
strPath = dlg.GetPathName();
if (strPath.Find(_T(".xls")) < 0)
{
strPath += _T(".xls");
}
}
TRY
{
CString cs;
CStdioFile file(strPath, CFile::shareExclusive | CFile::modeWrite | CFile::modeCreate);
setlocale(LC_CTYPE, ("chs")); //设置中文输出
file.WriteString(output);
file.Close();
CString temp;
temp.Format(_T("%s%s"), _T("已导出至"),strPath);
AfxMessageBox(temp);
}
CATCH_ALL(e)
{
e->ReportError();
return;
}
END_CATCH_ALL
}
}RS326Dlg类:
.h:
........
public:
CString input;
afx_msg void OnBnClickedButton1();
afx_msg void OnBnClickedButton2();
afx_msg void OnBnClickedButton3();
afx_msg void OnBnClickedButton4();
CString output;
CDlgpaint cdlg;
CString input3;
afx_msg void OnBnClickedButton5();
afx_msg void OnBnClickedButton6();
afx_msg void OnBnClickedButton7();
afx_msg void OnBnClickedButton8();......
.cpp:
......
Dataimport im;
int a = 0;
void CRS326Dlg::OnBnClickedButton1()
{
UpdateData(true);
im.dLe.SetSize(1, 1);
im.dLe(0, 0) = 0;
im.f.SetSize(1, 1);
im.f(0, 0) = 0;
im.p1.SetSize(1, 1);
im.p1(0, 0) = 0;
im.read(input,input3);
im.dealangle();
a = 1;
output = _T("");
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton2()
{
UpdateData(true);
if (a>0)
{
im.dofdeal();
im.output1(input);
a = 2;
output = _T("");
im.t = 0;
}
else
{
AfxMessageBox(_T("请读入数据"));
}
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton3()
{
UpdateData(true);
if (a==2)
{
im.Do_adjustment();
im.output(output);
a = 3;
im.t = 0;
}
else if(a==0)
{
AfxMessageBox(_T("请读入数据"));
}
else
{
AfxMessageBox(_T("请先进行数据概算"));
}
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton4()
{
UpdateData(true);
if (a==3)
{
cdlg.set(im.Psum, im.Asum, im.Pcount, im.Acount);
cdlg.DoModal();
}
else if(a==0)
{
AfxMessageBox(_T("请读入数据"));
}
else if(a==1)
{
AfxMessageBox(_T("请先进行进行数据概算"));
}
else
{
AfxMessageBox(_T("请先进行进行平差"));
}
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton5()
{
UpdateData(true);
if (a>2)
{
im.Save(output);
}
else
{
AfxMessageBox(_T("请先进行平差"));
}
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton6()
{
UpdateData(true);
input= _T("");
output = _T("");
input3= _T("");
a = 0;
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton7()
{
UpdateData(true);
if (a > 2)
{
im.Save1(output);
}
else
{
AfxMessageBox(_T("请先进行平差"));
}
UpdateData(false);
}
void CRS326Dlg::OnBnClickedButton8()
{
UpdateData(true);
ShellExecute(NULL, _T("open"), _T("C:\\Users\\lenovo\\Desktop\\帮助文档.docx"), NULL, NULL, SW_SHOW);//弹出使用说明
UpdateData(false);
}CDlgpaint类:
.h:
......
public:
Point* PO;//点数组
Angle* Ap;//测站数组
int count;
int count1;
protected:
virtual void DoDataExchange(CDataExchange* pDX); // DDX/DDV 支持
DECLARE_MESSAGE_MAP()
public:
void set(Point* Psum, Angle* Asum,int Pcount,int Acount);//值传递
CStatic Picture;
afx_msg void OnPaint();//窗口刷新函数.....
.cpp:
......
void CDlgpaint::set(Point* Psum, Angle* Asum, int Pcount, int Acount)
{
count = Pcount;
count1 = Acount;
PO = new Point[count];
Ap = new Angle[count1];
for (int i = 0; i < Pcount; i++)
{
PO[i].index = Psum[i].index;
PO[i].x = Psum[i].x;
PO[i].y = Psum[i].y;
PO[i].Q = Psum[i].Q;
PO[i].E = Psum[i].E;
PO[i].F = Psum[i].F;
PO[i].flag1 = Psum[i].flag1;
}
for (int i = 0; i < Acount; i++)
{
Ap[i].startP = Asum[i].startP;
Ap[i].endP = Asum[i].endP;
}
}
BEGIN_MESSAGE_MAP(CDlgpaint, CDialogEx)
ON_WM_PAINT()
END_MESSAGE_MAP()
// CDlgpaint 消息处理程序
PaintUI UI;
int t = 0;
void CDlgpaint::OnPaint()
{
CPaintDC dc(this); // device context for painting
// TODO: 在此处添加消息处理程序代码
// 不为绘图消息调用 CDialogEx::OnPaint()
CWnd* Pwin = GetDlgItem(IDC_STATIC);
CRect rect;
Pwin->GetClientRect(rect);
CDC* pDC = Pwin->GetDC();
UI.dofdeal(PO,Ap,count,count1);
UI.XY2po(rect);
UI.DrawUI(pDC, rect);
t++;
}PaintUI类:
.h:
#pragma once
#include "CDlgpaint.h"
#include "Datapoint.h"
#include "Dataangle.h"
struct UIpoint //点结构体
{
CString ID;
double x;
double y;
double Q;
double E;
double F;
int flag;
};
struct UIline//边结构体
{
CString start;
CString end;
};
class PaintUI
{
public:
PaintUI();
~PaintUI();
private:
UIpoint* P;//点数组
int count;//点数
UIline* L;//边数组
int count1;//边数
double width;//画布长度
double heigth;//画布宽度
double scale;//比例尺
//实地原点坐标
int Ox;
int Oy;
//栅格网单位长度和实地对于长度
double len;
double len1;
//栅格网长宽对应边数
int wdcount;
int heicount;
//误差椭圆比例尺
int dscale;
int dxw = 0;
int dyw = 0;
public:
CString remove(CString str);//字符串处理
int foundP(CString p1);//点号查找点对应下标
double change(double z);//坐标改正
void dofdeal(Point*Psum,Angle*Asum,int Pcount,int Acount);//值传递
void XY2po(CRect rect);//预处理,包括比例尺计算,坐标赋值
void DrawUI(CDC* pDC, CRect rect);//绘制图像
};.cpp:
#include "pch.h"
#include "PaintUI.h"
PaintUI::PaintUI()
{
}
PaintUI::~PaintUI()
{
if (P != NULL) {
delete[]P;
}
if (L!=NULL)
{
delete[]L;
}
}
CString PaintUI::remove(CString str)
{
str.Remove('\r');
str.Remove('\n');
return str;
}
int PaintUI::foundP(CString p1)
{
int a;
for (int j = 0; j < count; j++)
{
if (p1 == P[j].ID)
{
a = j;
return a;
}
}
return -1;
}
void PaintUI::dofdeal(Point* Psum, Angle* Asum, int Pcount,int Acount)
{
P = new UIpoint[Pcount];
count = Pcount;
for (int i = 0; i < Pcount; i++)
{
P[i].ID = remove(Psum[i].index);
P[i].x = Psum[i].y;
P[i].y = Psum[i].x;
P[i].Q = Psum[i].Q;
P[i].F = Psum[i].E;
P[i].E = Psum[i].F;
P[i].flag = Psum[i].flag1;
}
L = new UIline[Acount];
count1 = Acount;
for (int i = 0; i < Acount; i++)
{
L[i].start = remove(Asum[i].startP);
L[i].end = remove(Asum[i].endP);
}
}
double PaintUI::change(double z)
{
double a = 0;
a = -z + heigth;
return a;
}
//
void PaintUI::XY2po(CRect rect)
{
//计算比例尺
width = rect.Width();
heigth = rect.Height();
double minx=P[0].x, maxx= P[0].x, miny= P[0].y, maxy=P[0].y;
double dx, dy;
for (int i = 0; i <count; i++)
{
if (P[i].x<minx)
{
minx = P[i].x;
}
if (P[i].x > maxx)
{
maxx = P[i].x;
}
if (P[i].y < miny)
{
miny = P[i].y;
}
if (P[i].y > maxy)
{
maxy = P[i].y;
}
}
dx = maxx - minx;
dy = maxy - miny;
double rx = dx / (heigth * 0.9);
double ry = dy / (width * 0.9);
scale = rx < ry ? ry : rx;
//计算坐标原点实地坐标及栅格大小
Ox = ((int)(minx / 50)) * 50;
Oy = ((int)(miny / 50)) * 50;
double max = dx < dy ? dy : dx;
int nlen = max/ 4;
int dlen = nlen % 100;
if(dlen<50)
{
len = ((int)(nlen / 100)) * 100;
}
else
{
len = ((int)(nlen / 100)) * 100+100;
}
len1 = len;
len = len / scale;
wdcount = (width / len);
heicount = (heigth / len);
for (int i = 0; i < count; i++)
{
P[i].x = (P[i].x - Ox) / scale;
P[i].y = (P[i].y - Oy) / scale;
P[i].y = change(P[i].y);
P[i].x = P[i].x + len;
}
//居中计算
double minx1 = P[0].x, maxx1 = P[0].x, miny1 = P[0].y, maxy1 = P[0].y;
double dx1, dy1;
for (int i = 0; i < count; i++)
{
if (P[i].x < minx1)
{
minx1 = P[i].x;
}
if (P[i].x > maxx1)
{
maxx1 = P[i].x;
}
if (P[i].y < miny1)
{
miny1 = P[i].y;
}
if (P[i].y > maxy1)
{
maxy1 = P[i].y;
}
}
dx1 = (maxx1 + minx1)/2;
dy1 = (maxy1 + miny1)/2;
int xw = width / 2;
int yw = heigth / 2;
dxw = xw - dx1;
dyw = yw - dy1;
for (int i = 0; i < count; i++)
{
P[i].x += dxw;
P[i].y += dyw;
}
dxw = dxw * scale;
dyw = dyw * scale;
}
void PaintUI::DrawUI(CDC* pDC, CRect rect)
{
CPen pen5(PS_SOLID, 2, RGB(255, 0, 0));
CPen* oldpen5 = pDC->SelectObject(&pen5);
dscale = 3000;
for (int i = 2; i < count; i++)
{
double dsx, dsy, dex, dey;
dsx = (P[i].F * sin(P[i].Q)) * dscale + P[i].x;
dsy = (-P[i].F * cos(P[i].Q)) * dscale + P[i].y;
dex = (-P[i].F * sin(P[i].Q)) * dscale + P[i].x;
dey = (P[i].F * cos(P[i].Q)) * dscale + P[i].y;
pDC->MoveTo(dsx, dsy);
pDC->LineTo(dex, dey);
dsx = (-P[i].E * cos(P[i].Q)) * dscale + P[i].x;
dsy = (-P[i].E * sin(P[i].Q)) * dscale + P[i].y;
dex = (P[i].E * cos(P[i].Q)) * dscale + P[i].x;
dey = (P[i].E * sin(P[i].Q)) * dscale + P[i].y;
pDC->MoveTo(dsx, dsy);
pDC->LineTo(dex, dey);
double ex, fy;
ex = P[i].E;
fy = 0;
pDC->MoveTo(dsx, dsy);
for (int j = 6; j <= 360; j += 6)
{
ex = (dscale * P[i].E) * cos((j * acos(-1)) / 180);
fy = (dscale * P[i].F) * sin((j * acos(-1)) / 180);
dex = ex * cos(P[i].Q) - fy * sin(P[i].Q) + P[i].x;
dey = fy * cos(P[i].Q) + ex * sin(P[i].Q) + P[i].y;
pDC->LineTo(dex, dey);
}
}
pDC->SelectObject(oldpen5);
CPen pen(PS_SOLID, 2, RGB(30, 160, 220));
CPen* oldpen = pDC->SelectObject(&pen);
for (int i = 0; i < count1; i++)
{
int a = foundP(L[i].start);
int b = foundP(L[i].end);
pDC->MoveTo(P[a].x, P[a].y);
pDC->LineTo(P[b].x, P[b].y);
}
CPen pen1(PS_SOLID, 2, RGB(223, 113, 0));
CPen* oldpen1 = pDC->SelectObject(&pen1);
for (int i = 0; i < wdcount; i++)
{
int x = (heigth) / 40+1;
for (int j = 0; j < x; j++)
{
pDC->MoveTo(len * (i + 1), 40 * j);
pDC->LineTo(len * (i + 1), 40 * j+25);
}
}
for (int i = 0; i < heicount; i++)
{
int x = (width) / 40 + 1;
for (int j = 0; j < x; j++)
{
pDC->MoveTo(40 * j, change(len * (i + 1)));
pDC->LineTo(40 * j + 25, change(len * (i + 1)));
}
}
CPen pen2(PS_SOLID, 2, RGB(0, 0, 0));
CPen* oldpen2 = pDC->SelectObject(&pen2);
pDC->MoveTo(0,rect.bottom);
pDC->LineTo(0, rect.top);
pDC->MoveTo(0, rect.bottom);
pDC->LineTo(rect.right, rect.bottom);
pDC->MoveTo(0, rect.top);
pDC->LineTo(8, rect.top+10);
pDC->MoveTo(rect.right, rect.bottom);
pDC->LineTo(rect.right-10, rect.bottom-8);
pDC->TextOutW(8, rect.top + 13, _T("X"));
pDC->TextOutW(rect.right - 20, rect.bottom - 20, _T("Y"));
pDC->TextOutW(3, rect.bottom-20, _T("O"));
CPen pen3(PS_SOLID, 2, RGB(255, 0, 0));
CPen* oldpen3 = pDC->SelectObject(&pen3);
CFont font;//创建字体
font.CreateFontW(
20, // nHeight
0, // nWidth
0, // nEscapement
0, // nOrientation*
FW_NORMAL, // nWeight
FALSE, // bItalic
FALSE, // bUnderline
0, // cStrikeOut
ANSI_CHARSET, // nCharSet
OUT_DEFAULT_PRECIS, // nOutPrecision
CLIP_DEFAULT_PRECIS, // nClipPrecision
DEFAULT_QUALITY, // nQuality
DEFAULT_PITCH | FF_SWISS, // nPitchAndFamily
_T("宋体")); // lpszFacename*/)
CFont* pOldFont = pDC->SelectObject(&font);
for (int i = 0; i < count; i++)
{
pDC->TextOutW(P[i].x+3, P[i].y-2,P[i].ID);
}
for (int i = 0; i < wdcount+1; i++)
{
CString str;
str.Format(_T("%d"), (int)(Ox+len1*i-len1-dxw));
pDC->TextOutW(len*i, rect.bottom + 3, str);
}
for (int i = 0; i < heicount+1; i++)
{
CString str;
str.Format(_T("%d"), (int)(Oy + len1 * i-dyw));
pDC->TextOutW(-50, rect.bottom - len*i, str);
}
CPen pen4(PS_SOLID, 2, RGB(0, 255, 64));
CPen* oldpen4 = pDC->SelectObject(&pen4);
for (int i = 0; i < count; i++)
{
if (P[i].flag == 0) {
pDC->MoveTo(P[i].x, P[i].y+10);
pDC->LineTo(P[i].x+7, P[i].y-4);
pDC->LineTo(P[i].x - 7, P[i].y - 4);
pDC->LineTo(P[i].x, P[i].y + 10);
}
else
{
CBrush fillb;
fillb.CreateSolidBrush(RGB(255, 0, 0));
pDC->SelectObject(&fillb);
pDC->Ellipse(P[i].x-4,P[i].y-4, P[i].x+4, P[i].y+4);
fillb.DeleteObject();
}
}
}工具类:
Datapoint.h:
#pragma once
enum class Type
{
Know,
UnKnow
};
struct Point
{
CString index;//点号
double x;
double y;
int flag=1;//是否为已知点
int flag1=1;//是否为控制点
double mx=0, my=0, mk=0;//点位误差
double Q=0 ,E=0 , F=0;//误差椭圆参数
};Dataline.h:
#pragma once
#include <afxstr.h>
struct Line
{
CString start;//边的起始点
CString end;//边的终点
double length;//边长
double amangle;//方位角度值
};Dataangle.h:
#pragma once
struct Angle
{
CString startP;//测站起始点号
CString endP;//测站重点号
double angle;//角度值
int num;//找准测站号
};
struct Ang
{
CString startP;//角度起始点号
CString mid;//角度中点号
CString endP;//角度终点号
double angle;//角度值
};Matrix矩阵类:
.h:
#pragma once
class CMatrix
{
public:
CMatrix(int row = 3, int col = 3);
// copy constructor
CMatrix(const CMatrix& m);
~CMatrix(void);
private:
double** dMatData;//保存矩阵元素数据的二维数组
int iRow;//矩阵的行
int iCol;//矩阵的列
public:
int Row() const { return iRow; }//返回行
int Col() const { return iCol; }//返回列
void SetSize(int row, int col);//调整数组的大小,原有数据不变(未测试)
double& operator () (int row, int col);//获取矩阵元素
double operator () (int row, int col) const;//重载获取矩阵元素函数,只有const对象能访问
CMatrix& operator = (const CMatrix& m);
//注意:友元函数并不是类自己的成员函数
friend CMatrix operator + (const CMatrix& m1, const CMatrix& m2);
friend CMatrix operator - (const CMatrix& m1, const CMatrix& m2);
friend CMatrix operator * (const CMatrix& m1, const CMatrix& m2);
friend CMatrix operator * (const double& num, const CMatrix& m1);
friend CMatrix operator * (const CMatrix& m1, const double& num);
friend CMatrix operator ~ (const CMatrix& m);//矩阵转置
CMatrix Inv();//矩阵求逆
void Unit();//生成单位矩阵
CString look();
};.cpp:
#include "pch.h"
#include "Matrix.h"
#include "math.h"
CMatrix::CMatrix(int row, int col)
{
iRow = row;
iCol = col;
dMatData = new double* [row];
for (int i = 0; i < row; i++)
{
dMatData[i] = new double[col];
for (int j = 0; j < col; j++)
{
dMatData[i][j] = 0;
}
}
}
// copy constructor,
//拷贝构造函数的作用:
//(1)以类对象作为函数参数传值调用时;
//(2)函数返回值为类对象;
//(3)用一个已定义的对象去初始化一个新对象时;
CMatrix::CMatrix(const CMatrix& m)
{
iRow = m.Row();
iCol = m.Col();
dMatData = new double* [iRow];
for (int i = 0; i < iRow; i++)
{
dMatData[i] = new double[iCol];
// for(int j=0;j<iCol;j++)
{
memcpy(dMatData[i], m.dMatData[i], sizeof(double) * iCol);
}
}
}
CMatrix::~CMatrix(void)
{
for (int i = 0; i < iRow; i++)
{
delete[] dMatData[i];
}
delete[] dMatData;
}
//返回数组元素(引用返回)
double& CMatrix::operator () (int row, int col)
{
if (row >= iRow || col >= iCol)
{
throw("CMatrix::operator(): Index out of range!");
}
return dMatData[row][col];
}
返回数组元素(重载)
double CMatrix::operator () (int row, int col) const
{
if (row >= iRow || col >= iCol)
{
throw("CMatrix::operator(): Index out of range!");
}
return dMatData[row][col];
}
//重载预算符+
CMatrix operator + (const CMatrix& m1, const CMatrix& m2)
{
if ((m1.Col() != m2.Col()) || (m1.Row() != m2.Row()))
{
throw("CMatrix::operator+: The two matrix have different size!");
}
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) + m2(i, j);
}
}
return matTmp;
}
//重载赋值运算符=,当左右两边矩阵的大小不相等时,
//以右边的大小为基准,调整左边矩阵的大小
CMatrix& CMatrix::operator = (const CMatrix& m)
{
//revised in 2011-4-1, by Daiwujiao
// if(iRow!=m.Row()||iCol!=m.Col())
//{
// throw( "CMatrix::operator=: The two matrix have different size!");
//}
if (iRow != m.Row() || iCol != m.Col())
{
SetSize(m.Row(), m.Col());
}
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
dMatData[i][j] = m(i, j);
}
}
return *this;
}
//调整矩阵大小,原有值不变
void CMatrix::SetSize(int row, int col)
{
if (row == iRow && col == iCol)
{
return;
}
double** rsData = new double* [row];
for (int i = 0; i < row; i++)
{
rsData[i] = new double[col];
for (int j = 0; j < col; j++)
{
rsData[i][j] = 0;
}
}
int minRow = (iRow > row) ? row : iRow;
int minCol = (iCol > col) ? col : iCol;
int colSize = minCol * sizeof(double);
for (int i = 0; i < minRow; i++)
{
memcpy(rsData[i], dMatData[i], colSize);
}
for (int i = 0; i < minRow; i++)
{
delete[] dMatData[i];
}
delete[] dMatData;
dMatData = rsData;
iRow = row;
iCol = col;
return;
}
//重载预算符-
CMatrix operator - (const CMatrix& m1, const CMatrix& m2)
{
if ((m1.Col() != m2.Col()) || (m1.Row() != m2.Row()))
{
throw("CMatrix::operator-: The two matrix have different size!");
}
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) - m2(i, j);
}
}
return matTmp;
}
//重载预算符*,两个矩阵相乘,m1的列要等于m2的行
CMatrix operator * (const CMatrix& m1, const CMatrix& m2)
{
if ((m1.Col() != m2.Row()))
{
throw("CMatrix::operator*: The col of matrix m1 doesn't equ to row of m2 !");
}
CMatrix matTmp(m1.Row(), m2.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m2.Col(); j++)
{
for (int k = 0; k < m2.Row(); k++)
{
matTmp(i, j) += m1(i, k) * m2(k, j);
}
}
}
return matTmp;
}
//重载预算符*,矩阵右乘一个数
CMatrix operator * (const CMatrix& m1, const double& num)
{
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) * num;
}
}
return matTmp;
}
//重载预算符*,矩阵左乘一个数
CMatrix operator * (const double& num, const CMatrix& m1)
{
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) * num;
}
}
return matTmp;
}
//矩阵转置
CMatrix operator ~ (const CMatrix& m)
{
CMatrix matTmp(m.Col(), m.Row());
for (int i = 0; i < m.Row(); i++)
for (int j = 0; j < m.Col(); j++)
{
matTmp(j, i) = m(i, j);
}
return matTmp;
}
//矩阵求逆
//采用选全主元法
CMatrix CMatrix::Inv()
{
if (iRow != iCol)
{
throw("待求逆的矩阵行列不相等!");
}
int i, j, k, vv;
CMatrix InvMat(iRow, iRow);
//复制矩阵
InvMat = *this;
int* MainRow = new int[iRow];
int* MainCol = new int[iRow];//用于记录主元素的行和列
double dMainCell;//主元元素的值
double dTemp;//临时变量
for (k = 0; k < iRow; k++)
{
dMainCell = 0;
//选全主元
for (i = k; i < iRow; i++)
{
for (j = k; j < iRow; j++)
{
dTemp = fabs(InvMat(i, j));
if (dTemp > dMainCell)
{
dMainCell = dTemp;
MainRow[k] = i;
MainCol[k] = j;
}
}
}
if (fabs(dMainCell) < 0.0000000000001)//矩阵秩亏,不能求逆
{
throw("矩阵秩亏");
}
if (MainRow[k] != k)//交换行
{
for (j = 0; j < iRow; j++)
{
vv = MainRow[k];
dTemp = InvMat(k, j);
InvMat(k, j) = InvMat(vv, j);
InvMat(vv, j) = dTemp;
}
}
if (MainCol[k] != k)//交换列
{
for (i = 0; i < iRow; i++)
{
vv = MainCol[k];
dTemp = InvMat(i, k);
InvMat(i, k) = InvMat(i, vv);
InvMat(i, vv) = dTemp;
}
}
InvMat(k, k) = 1.0 / InvMat(k, k);//计算乘数
for (j = 0; j < iRow; j++) //计算主行
{
if (j != k)
{
InvMat(k, j) = InvMat(k, j) * InvMat(k, k);
}
}
for (i = 0; i < iRow; i++)//消元
{
if (i != k)
{
for (j = 0; j < iRow; j++)
{
if (j != k)
{
InvMat(i, j) -= InvMat(i, k) * InvMat(k, j);
}
}
}
}
for (i = 0; i < iRow; i++)//计算主列
{
if (i != k)
{
InvMat(i, k) = -InvMat(i, k) * InvMat(k, k);
}
}
}
for (k = iRow - 1; k >= 0; k--)
{
if (MainCol[k] != k)// 交换行
{
for (j = 0; j < iRow; j++)
{
vv = MainCol[k];
dTemp = InvMat(k, j);
InvMat(k, j) = InvMat(vv, j);
InvMat(vv, j) = dTemp;
}
}
if (MainRow[k] != k)//交换列
{
for (i = 0; i < iRow; i++)
{
vv = MainRow[k];
dTemp = InvMat(i, k);
InvMat(i, k) = InvMat(i, vv);
InvMat(i, vv) = dTemp;
}
}
}
delete[] MainRow;
delete[] MainCol;
return InvMat;
}
//单位化矩阵
void CMatrix::Unit()
{
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
dMatData[i][j] = (i == j) ? 1 : 0;
}
}
}
CString CMatrix::look()
{
CString result1, result2;
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
result1.Format(_T("%lf "), dMatData[i][j]);
result2 = result2 + result1;
if (j == iCol - 1)
{
result1.Format(_T("\r\n"));
result2 = result2 + result1;
}
}
}
return result2;
}















 2232
2232











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











