







二分图的定义:每两个相邻的节点不能染相同的颜色,可以用两种颜色染完所有的图,简单来说就是非奇数环图。
匹配:在二分图的子图中,任意两条边不依附于同一个顶点
最大匹配:二分图中所含有的最大匹配数
完美匹配:图中的每个点都是匹配点
匹配点:匹配边上的两点
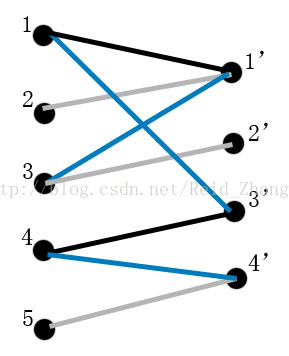
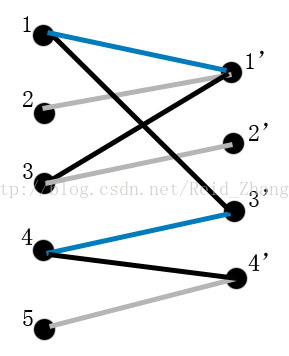
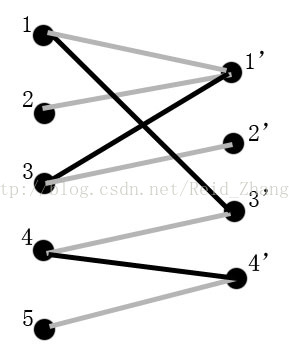
增广路径:若P是图G中一条联通两个未匹配顶点的路径,且属于M的边和不属于M的边在P上交替出现,则称P为相对于M的一条增广路径。

最小点覆盖:选出最小的点数,使得二分图中的任意一条边的其中一个点在这个点的集合中=二分图的最大匹配数。
最大独立集:在二分图中选取最多数目的点,使得点集中任意两点在二分图中都不存在一条边相连,这个点集就是最大独立集= |G|-最小点覆盖=|G|-最大匹配数
最小路径点覆盖:即在DAG图中寻找尽量少的路径,使得每个节点恰好在一条路径上(不同的路径不可能有公共点)。注意:单独的节点也可以作为一条路径。
最小路径重复点覆盖:先求传递闭包,然后再求最小路径点覆盖。(floyd算法求传递闭包形成新图然后匹配即可)
匈牙利匹配:最大匹配数
根据是不是含有增广路径
例题:二分图的最大匹配数
下面是相关代码:
#include <algorithm>
#include <cstdio>
#include <cstring>
#include <iostream>
#include <queue>
using namespace std;
//const int N = 1e6 + 10, INF = 0x3f3f3f3f;
const int N = 510, M = 1e5 + 10;
int n1, n2, m;
int match[N];
int h[N], e[M], ne[M], idx;
bool st[N];
void add(int a, int b){
e[idx] = b, ne[idx] = h[a], h[a] = idx ++ ;
}
bool find(int x){
for(int i = h[x]; i != -1; i = ne[i]){
int j = e[i];
if(!st[j]){
st[j] = true;
if(match[j] == 0 || find(match[j])){
match[j] = x;
return true;
}
}
}
return false;
}
int main() {
cin >> n1 >> n2 >> m;
memset(h, -1, sizeof h);
while(m -- ){
int a, b;
cin >> a >> b;
add(a, b);
}
int res = 0;
for(int i = 1; i <= n1; i ++ ){
memset(st, false, sizeof st);
if(find(i)) res ++ ;
}
cout << res;
return 0;
}
相关例题:
棋盘覆盖















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









