






- 第一章三相永磁同步电机的数学模型与仿真
- 1、三相PMSM的转子结构
- 忽略电机铁芯的饱和;
- 不计电机中的涡流和磁滞损耗;
- 电机中的电流为对称的三相正弦波电流
- 在以上的假设下
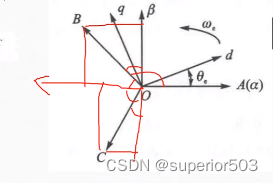
- 1.2三相PMSM的坐标变换
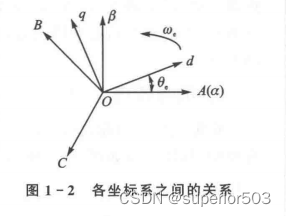
- 为了简化PMSM的数学模型,采用的坐标变换通常包括:
- 静止坐标变换(Clark 变换)——alpha、beta坐标轴(静止坐标系)
- 同步旋转坐标变换(Park 变换)——d、q坐标轴(旋转坐标系)
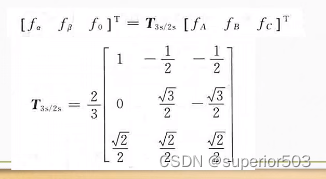
- 变换矩阵前的系数为 2 /3 是根据幅值不变作为约束条件得到的
- 1.21、Clark变换
- 三相自然坐标系ABC变换到静止坐标系alpha、beta中称为Clark变换
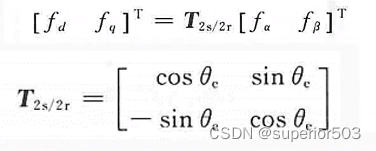
1.2.2 Park变换
将静止坐标系变换到同步旋转坐标系d-q的坐标变换称为Park变换
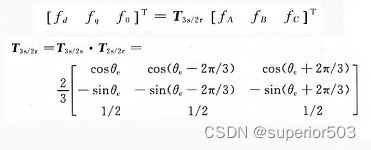
将自然坐标系 ABC 变换到同步旋转坐标系 d-q:
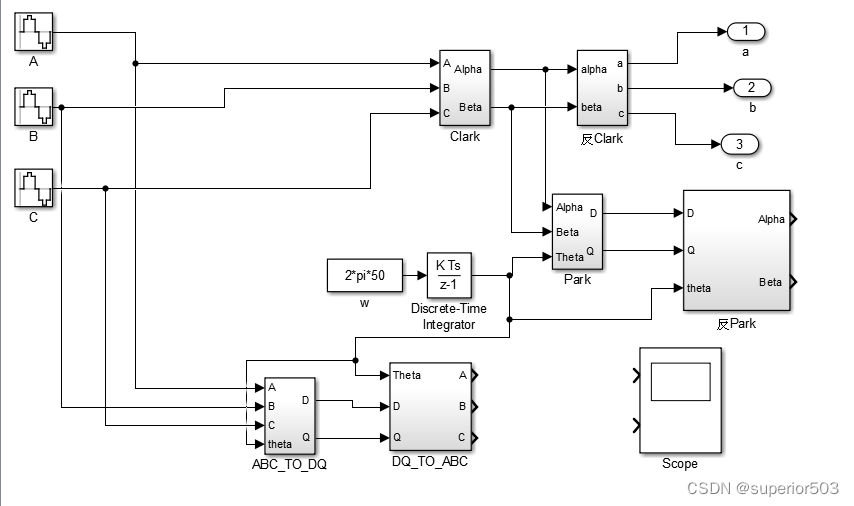
MATLAB——坐标变换仿真框图
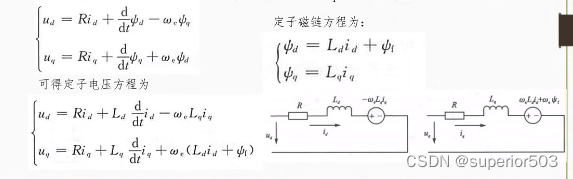
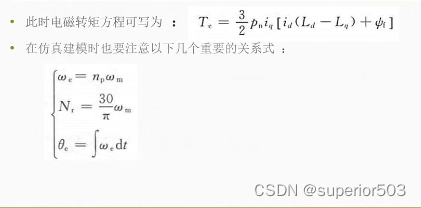
1.3同步旋转坐标系下的数学模型
为了方便后期控制器的设计,通常选择同步坐标系 d-q下的数学模型
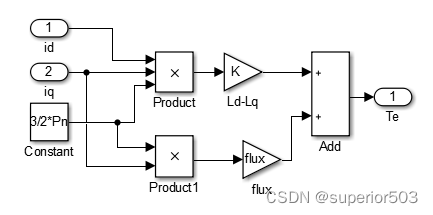
电磁转矩计算

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









