






文章目录
改造先前的红黑树
前面我们模拟实现了红黑树。而前面我们知道红黑树的就是STL容器里面的set和map容器的底层数据结构。 但是有一个很致命的问题:set容器是K的结构,map是K,V的结构
但是我们先前写好的红黑树的节点数据是一个pair类型!这样一来,map是可以直接使用了。但是set不能使用了,难道我们要实现两颗红黑树吗?
我们不妨来看一看源代码里面是怎么处理的。
参考SGI版本的STL源码
首先我们来看STL里面的红黑树的定义:
//红黑树定义在stl_tree.h
//树的节点的定义,这里用了一个泛型参数
template <class Value>
struct __rb_tree_node
{
typedef __rb_tree_node<Value>* link_type;
Value value_field;
};
//再来看看红黑树的定义(简化了)
template <class Key, class Value, class KeyOfValue>
class rb_tree {
protected:;
typedef __rb_tree_node<Value> rb_tree_node;
可以看到,库里的红黑树并不是把数据类型写死成pair,而是把把数据声明成了一个泛型!也就意味着,下层红黑树并不决定真正存储节点的类型,而是由上层决定。
模拟实现set容器
接下来,我们就来模拟实现set容器,首先我们知道set容器是key模型,但是它是怎么做到和map共用一棵红黑树的呢?同样我们来看看源代码。
参考set的源码
经过简化后,我们能够看到set实现key模型代码的关键所在
template <class Key>
class set {
public:
// typedefs:
typedef Key key_type;
typedef Key value_type;
private:
typedef rb_tree<Key, Key, identity<value_type>> rep_type;
rep_type t; // red-black tree representing set
从模板的定义我们不难可以看到,set就是把key同时作为参数传递给下一层的红黑树。那么这里的第三个参数又是什么意思呢?
首先,回想一下。我们这里的数据是泛型,那么意味着我们传递的数据可能是任意类型:string,int,double甚至可能是Teacher等等的不明确的类型!而底层的红黑树需要根据数据进行有序插入。
而转换数据就是一个重要的事情:identity<value_type>完成的就是这个任务
模拟实现set
接下来我们就来根据库里的代码迅速搭一个框架出来:
namespace chy{
template<typename K>
struct KeyofSet
{
const K operator()(const K key)
{
return key;
}
};
//set的容器的结构
template<typename K>
class set
{
public:
//插入算法->调用_tree的insert
bool insert(const K& key)
{
return _tree.insert(key);
}
private:
RBTree<K,K,KeyofSet<K>> _tree;
};
}
这就是set容器的整个大框架。而set的迭代器我们将会在实现了红黑树的迭代器以后再封装出来。map也是如此。
模拟实现map容器
前面我们实现了set容器,下面我们就来实现一下map容器,和set一样,我们先来看看库里面的map的定义。
参考map的源代码
经过简化以后,map的整个大框架如下
template <class Key, class Val>
class map {
public:
// typedefs:
typedef Key key_type;
typedef Val data_type;
typedef Val mapped_type;
typedef pair<const Key, Val> value_type;
private:
//map的红黑树结构
typedef rb_tree<Key,pair<const Key, Val> , select1st<value_type>> rep_type;
rep_type t; // red-black tree representing map
不难可以看出,map的第二个参数就是一个pair,因此就实现了set和map复用一棵红黑树。不得不佩服前辈们的智慧。
模拟实现map
接下来我们也来封装一下map容器
namespace chy{
//实现转换的仿函数
template<typename K,typename V>
struct KeyofMap
{
const K operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
template<typename K,typename V>
class map
{
public:
bool insert(const K& key)
{
return _tree.insert(key);
}
private:
RBTree<K, pair<K, V>, KeyofMap<K,V>> _tree;
};
}
到这里,set和map容器的简单雏形就出来了。但是我们还有迭代器和map的operator[]还没有实现,而这些都基于底层结构红黑树。下面我们就来给红黑树添加迭代器。
为红黑树封装迭代器
和实现list的迭代器类似,红黑树的迭代器也是一个自定义类型,大致的结构如下:
template<typename T, typename Ref, typename Ptr>
struct RBTreeIterator
{
typedef RBTreeNode<T> Node;
//给迭代器重命名,否则太长了
typedef RBTreeNode<T,Ref,Ptr> Self;
//封装节点的指针
Node* _node;
explicit RBTreeNode(Node* node)
:_node(node)
{}
//重载*
Ref operator*()
{
return _node->_val;
}
//重载->()
Ptr operator->()
{
return &_node->_val;
}
bool operator==(const Self& s) const
{
return _node == s._node;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
//实现++和--才是这里的重头戏!
Self& operator++()
{ //如何实现++
return *this;
}
Self& operator++(int)
{
Self tmp(*this);
++(*this);
return tmp;
}
Self& operator--()
{
//--如何实现
return *this;
}
Self& operator--(int)
{
Self tmp(*this);
--(*this);
return tmp;
}
};
由于底层的结构是树型结构,所以相对而言++和–是比较繁琐的一个步骤,接下来我们通过图片来分析++应该如何实现。
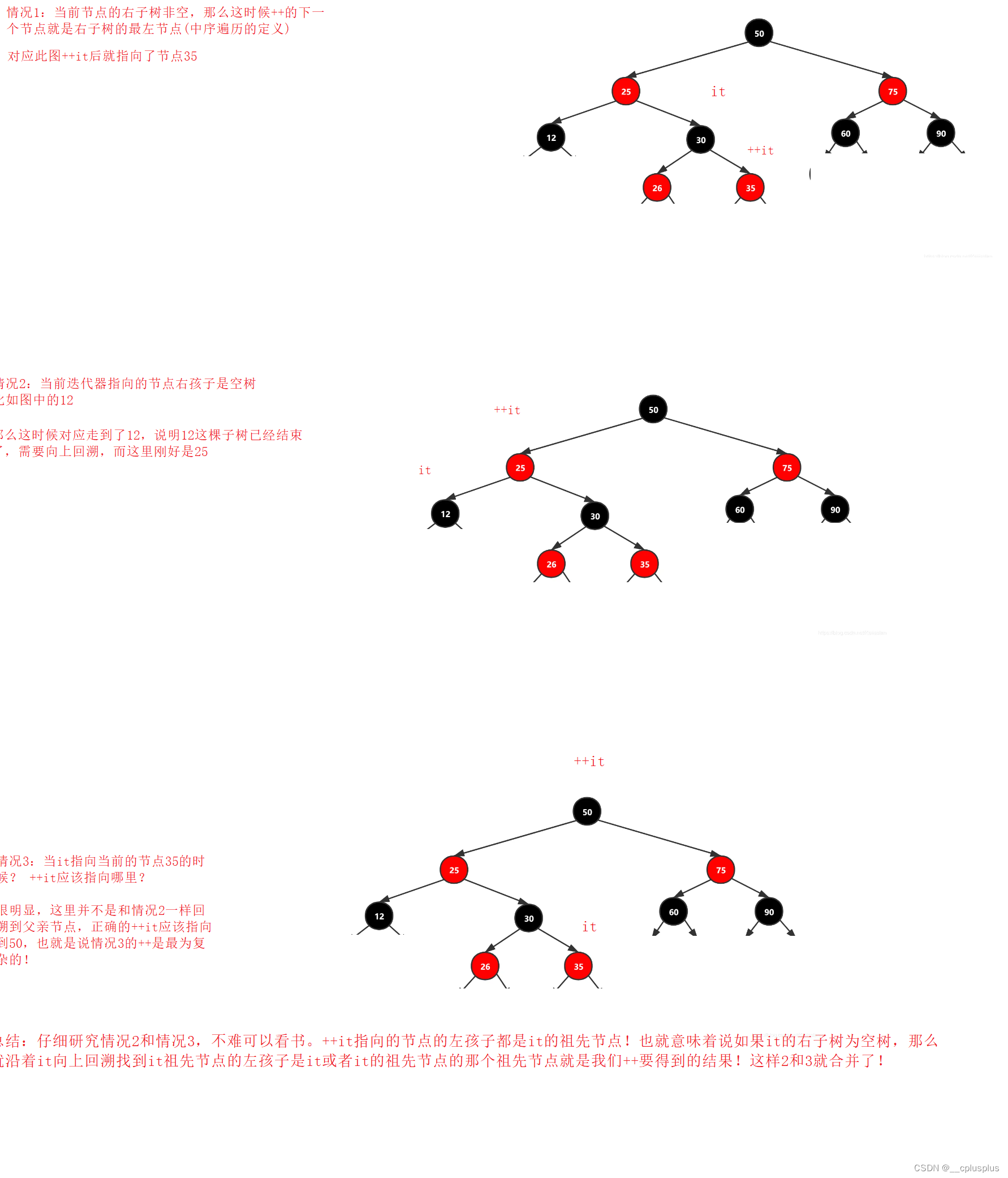
所以基于上面的分析,我们就可以写出如下的代码
Self& operator++()
{
//右子树非空,++寻找右子树的最左节点
if (_node->_right)
{
Node* minRight = _node->_right;
while (minRight && minRight->_left)
{
minRight = minRight->_left;
}
_node = minRight;
}
//右子树为空,向上回溯到it的祖先节点是it祖先左孩子的祖先节点
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
而对于–的操作就是和++对称的,这里直接给出代码
Self& operator--()
{
//如果左孩子非空,找左孩子的最右节点
if (_node->_left)
{
Node* maxLeft = _node->_left;
while (maxLeft && maxLeft->_right)
{
maxLeft = maxLeft->_right;
}
_node = maxLeft;
}
//左子树为空,那么需要向上回溯到it祖先节点是it祖先节点的右孩子的那个祖先节点
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && parent->_left == cur)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
顺带提供后置的版本
//这里的int是给编译器传的,以便于识别调用对应的版本
Self& operator++(int)
{
Self tmp(*this);
++(*this);
return tmp;
}
Self& operator--(int)
{
Self tmp(*this);
--(*this);
return tmp;
}
接下来我们在来给红黑树添加start()和finish() (为了不和后面set和map的begin()和end()起冲突,所以这里用这两个命名)
class RBTree
{
typedef RBTreeNode<T> Node;
public:
//套迭代器
typedef RBTreeIterator<T, T&, T*> iterator;
typedef RBTreeIterator<T, const T&, const T*> const_iterator;
RBTree()
:_root(nullptr)
{}
//start是整棵树里面最小的节点
iterator start()
{
Node* minLeft = _root;
while (minLeft && minLeft->_left)
{
minLeft = minLeft->_left;
}
return iterator(minLeft);
}
iterator finish()
{
return iterator(nullptr);
}
const_iterator start() const
{
Node* minLeft = _root;
while (minLeft && minLeft->_left)
{
minLeft = minLeft->_left;
}
return const_iterator(minLeft);
}
const_iterator finish() const
{
return const_iterator(nullptr);
}
到这里,红黑树的迭代器基本已经封装完成了。接下来我们封装set和map的迭代器
//封装set
namespace chy {
template<typename K>
struct KeyofSet
{
const K operator()(const K key)
{
return key;
}
};
template<typename K>
class set
{
public:
/*这里使用typename修饰,是因为编译器按需实例化的时候,可能内嵌的类型没有实例化,找出来也可能是虚拟类型,使用typename修饰告诉编译器等待内嵌类型实例化以后再进去寻找
*/
typedef typename RBTree<K, K, KeyofSet<K>>::const_iterator iterator;
typedef typename RBTree<K, K, KeyofSet<K>>::const_iterator const_iterator;
iterator begin() const
{
return _tree.start();
}
iterator end() const
{
return _tree.finish();
}
private:
RBTree<K, K, KeyofSet<K>> _tree;
map的封装如下:
namespace chy
{
template<typename K,typename V>
struct KeyofMap
{
const K operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
template<typename K,typename V>
class map
{
public:
typedef typename RBTree<K, pair<K, V>, KeyofMap<K,V>>::iterator iterator;
typedef typename RBTree<K, pair<K, V>, KeyofMap<K,V>>::const_iterator const_iterator;
iterator begin()
{
return _tree.start();
}
iterator end()
{
return _tree.finish();
}
const_iterator begin() const
{
return _tree.start();
}
const_iterator end() const
{
return _tree.finish();
}
private:
RBTree<K, pair<K, V>, KeyofMap<K,V>> _tree;
但是我们目前的map仍然有不足的地方,我们还没有实现对应的opreator[],而由于operator[]底层调用的是insert,所以我们还需要修改insert。
实现map的operator[]
为了实现operator[],我们需要对应修改insert的代码:
pair<iterator,bool> insert(const T& val)
{
if (!_root)
{
_root = new Node(val);
_root->_col = BLACK;
return make_pair(iterator(_root),true);
}
Node* parent = nullptr;
Node* cur = _root;
//使用仿函数转换数据对象
KeyOfT kot;
while (cur)
{ //左子树
if (kot(cur->_val) > kot(val))
{
parent = cur;
cur = cur->_left;
}
//右子树
else if (kot(cur->_val) < kot(val))
{
parent = cur;
cur = cur->_right;
}
//停止重复插入
else
{
return make_pair(iterator(cur),false);
}
}
//插入节点默认是红色
cur = new Node(val);
//因为旋转会变化,所以提前记录
Node* newnode = cur;
if (kot(parent->_val) > kot(val))
parent->_left = cur;
else
parent->_right = cur;
cur->_col = RED;
cur->_parent = parent;
//如果父亲存在且为红色,违反规则三,需要处理
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent;
if (parent == grandfather->_left)
{
Node* uncle = grandfather->_right;
//情况1:叔叔存在且为红色
//处理方式:叔叔和父亲变黑,祖父变红,继续向上调整
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
//叔叔不存在||叔叔存在且是黑色
else
{
//如果父亲是祖父的左且cur也是父亲的左要右单旋
if (cur == parent->_left)
{
RotateR(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
//如果cur是父亲的右,就要双旋
/* g
* p
* c
*/
else
{
RotateL(parent);
RotateR(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
//父亲是祖父的右
else
{
Node* uncle = grandfather->_left;
//情况1:叔叔存在且为红色
//处理方式:叔叔和父亲变黑,祖父变红,继续向上调整
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
//叔叔不存在||叔叔存在且是黑色
else
{
//如果父亲是祖父的右且cur也是祖父的右要左单旋转
if (cur == parent->_right)
{
RotateL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
RotateR(parent);
RotateL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
}
//根节点要保持黑色
_root->_col = BLACK;
return make_pair(iterator(newnode),true);
}
改造set和map的insert
air<iterator,bool> insert(const K& key)
{
pair<typename RBTree<K, K, KeyofSet<K>>::iterator, bool> ret = _tree.insert(key);
return pair<iterator,bool>(iterator(ret.first._node), ret.second);
}
pair<iterator,bool> insert(const pair<K,V>& kv)
{
return _tree.insert(kv);
}
最后就是封装operator[]
//不存在就插入,存在就返回对应的V的引用
V& operator[](const K& key)
{
pair<iterator, bool> ret = _tree.insert(make_pair(key, V()));
return ret.first->second;
}
以上就是整篇文章的内容。模拟实现这两个容器是为了更好体会容器的底层结构。而不是造更好的轮子,对底层结构有更深的理解,才能更好使用容器。 如有不足之处还望指出。希望大家共同进步。















 1133
1133











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









