






卡尔曼滤波器的python小案例实现(欢迎来找错)
对于卡尔曼滤波器,网上有很多参考教程与推导,本项目主要是提供一个具体实现的案例,方便学习与参考
基本原理
预测
x ˇ k = A k x ^ + u k , P ˇ k = A k P ^ k − 1 A k T + R \check{x}_k=A_k\hat{x}+u_k,\check{P}_k=A_k\hat{P}_{k-1}A_{k}^{T}+R xˇk=Akx^+uk,Pˇk=AkP^k−1AkT+R
更新,计算卡尔曼增益
K = P ˇ k C k T ( C k P ˇ k C k T + Q k ) − 1 K=\check{P}_kC_{k}^{T}\left( C_k\check{P}_kC_{k}^{T}+Q_k \right) ^{-1} K=PˇkCkT(CkPˇkCkT+Qk)−1
计算后验分布
x
^
k
=
x
ˇ
k
+
K
(
z
k
−
C
k
x
ˇ
k
)
\hat{x}_k=\check{x}_k+K\left( z_k-C_k\check{x}_k \right)
x^k=xˇk+K(zk−Ckxˇk)
P
^
k
=
(
I
−
K
C
k
)
P
ˇ
k
\hat{P}_k=\left( I-KC_k \right) \check{P}_k
P^k=(I−KCk)Pˇk
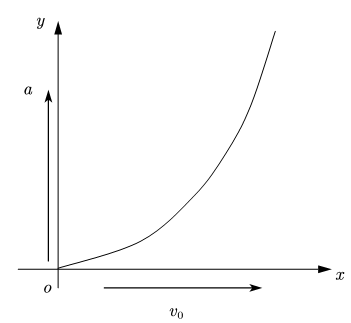
问题背景(原创)
假设现在有一个点在有一个点在坐标(0,,0)处,它水平方向以v0的速度运动,竖直方向会以加速度为a的大小进行匀加速运动。因此这个轨迹实际上可以抽象为一个平抛运动。然后假设这个点上加装了一个陀螺仪,能够实时地测量出这个点的加速度,并且陀螺仪的精度也知道。在陀螺仪的每一个采样间隔时刻,假设能够实时获取卫星的经过解算后的坐标观测数据,精度也知道。如何用卡尔曼滤波进行优化呢?
基本方程(高中物理学过)
{
H
e
n
g
k
=
H
e
n
g
k
−
1
+
v
0
Δ
t
Z
o
n
g
k
=
Z
o
n
g
k
−
1
+
Z
˙
o
n
g
k
−
1
Δ
t
+
1
2
a
k
−
1
′
Δ
t
2
Z
˙
o
n
g
k
=
Z
˙
o
n
g
k
−
1
+
a
k
−
1
′
Δ
t
\left\{ \begin{array}{l} Heng_k=Heng_{k-1}+v_0\varDelta t\\ Zong_k=Zong_{k-1}+\dot{Z}ong_{k-1}\varDelta t+\frac{1}{2}a_{k-1}^{'}\varDelta t^2\\ \dot{Z}ong_k=\dot{Z}ong_{k-1}+a_{k-1}^{'}\varDelta t\\ \end{array} \right.
⎩
⎨
⎧Hengk=Hengk−1+v0ΔtZongk=Zongk−1+Z˙ongk−1Δt+21ak−1′Δt2Z˙ongk=Z˙ongk−1+ak−1′Δt
Z
˙
o
n
g
k
表示
k
时刻
y
方向的速度
\dot{Z}ong_k\text{表示}k\text{时刻}y\text{方向的速度}
Z˙ongk表示k时刻y方向的速度
a
k
−
1
′
表示加速度观测值
a_{k-1}^{'}\text{表示加速度观测值}
ak−1′表示加速度观测值
表示成矩阵形式
[ H e n g k Z o n g k Z ˙ o n g k ] = [ 1 0 0 0 1 Δ t 0 0 1 ] [ H e n g k − 1 Z o n g k − 1 Z ˙ o n g k − 1 ] + [ v 0 Δ t 1 2 a k − 1 ′ Δ t 2 a k − 1 ′ Δ t ] \left[ \begin{array}{c} Heng_k\\ Zong_k\\ \dot{Z}ong_k\\ \end{array} \right] =\left[ \begin{matrix} 1& 0& 0\\ 0& 1& \varDelta t\\ 0& 0& 1\\ \end{matrix} \right] \left[ \begin{array}{c} Heng_{k-1}\\ Zong_{k-1}\\ \dot{Z}ong_{k-1}\\ \end{array} \right] +\left[ \begin{array}{c} v_0\varDelta t\\ \frac{1}{2}a_{k-1}^{'}\varDelta t^2\\ a_{k-1}^{'}\varDelta t\\ \end{array} \right] HengkZongkZ˙ongk = 1000100Δt1 Hengk−1Zongk−1Z˙ongk−1 + v0Δt21ak−1′Δt2ak−1′Δt
进一步推导
[
H
e
n
g
k
Z
o
n
g
k
Z
˙
o
n
g
k
]
⏟
x
k
=
[
1
0
0
0
1
Δ
t
0
0
1
]
⏟
A
k
[
H
e
n
g
k
−
1
Z
o
n
g
k
−
1
Z
˙
o
n
g
k
−
1
]
⏟
x
k
−
1
+
[
v
0
Δ
t
1
2
a
k
−
1
Δ
t
2
a
k
−
1
Δ
t
]
⏟
u
k
+
[
0
1
2
w
k
Δ
t
2
w
k
Δ
t
]
⏟
w
k
\underset{x_k}{\underbrace{\left[ \begin{array}{c} Heng_k\\ Zong_k\\ \dot{Z}ong_k\\ \end{array} \right] }}=\underset{A_k}{\underbrace{\left[ \begin{matrix} 1& 0& 0\\ 0& 1& \varDelta t\\ 0& 0& 1\\ \end{matrix} \right] }}\underset{x_{k-1}}{\underbrace{\left[ \begin{array}{c} Heng_{k-1}\\ Zong_{k-1}\\ \dot{Z}ong_{k-1}\\ \end{array} \right] }}+\underset{u_k}{\underbrace{\left[ \begin{array}{c} v_0\varDelta t\\ \frac{1}{2}a_{k-1}\varDelta t^2\\ a_{k-1}\varDelta t\\ \end{array} \right] }}+\underset{w_k}{\underbrace{\left[ \begin{array}{c} 0\\ \frac{1}{2}w_k\varDelta t^2\\ w_k\varDelta t\\ \end{array} \right] }}
xk
HengkZongkZ˙ongk
=Ak
1000100Δt1
xk−1
Hengk−1Zongk−1Z˙ongk−1
+uk
v0Δt21ak−1Δt2ak−1Δt
+wk
021wkΔt2wkΔt
其中:
a
k
−
1
′
=
a
k
−
1
+
w
k
,
也就是真实值加误差噪声。
\text{其中:}a_{k-1}^{'}=a_{k-1}+w_k,\text{也就是真实值加误差噪声。}
其中:ak−1′=ak−1+wk,也就是真实值加误差噪声。
观测方程
[ x y ] ⏟ z k = [ 1 0 0 0 1 0 ] ⏟ C k [ H e n g k Z o n g k Z ˙ o n g k ] ⏟ x k + [ v k x v k y ] ⏟ v k \underset{z_k}{\underbrace{\left[ \begin{array}{c} x\\ y\\ \end{array} \right] }}=\underset{C_k}{\underbrace{\left[ \begin{matrix} 1& 0& 0\\ 0& 1& 0\\ \end{matrix} \right] }}\underset{x_k}{\underbrace{\left[ \begin{array}{c} Heng_k\\ Zong_k\\ \dot{Z}ong_k\\ \end{array} \right] }}+\underset{v_k}{\underbrace{\left[ \begin{array}{c} v_{k}^{x}\\ v_{k}^{y}\\ \end{array} \right] }} zk [xy]=Ck [100100]xk HengkZongkZ˙ongk +vk [vkxvky]
求解
有关卡尔曼滤波的基本方程定义结束,接下来进行求解
import numpy as np
import matplotlib.pylab as plt
# 定义参数
# 水平初速度
v0=0.5
# 竖直加速度
a=10
start = 0 # 起始值
stop = 50 # 结束值(不包含在数组中)
# 采样间隔
delta_t=1
# 竖直加速度的误差
w_mean = 0 # 均值
w_std = 9 # 标准差
w_size = int((stop-start)/delta_t) # 数组大小
w_noise = np.random.normal(w_mean, w_std, w_size)
# 构造GPS观测数据与加速度观测数据
a_obs=a+w_noise
# print(a_obs)
# 构造GPS观测值的误差
v_mean = 0 # 均值
v_std = 16 # 标准差
v_size = int((stop-start)/delta_t) # 数组大小
v_noise = np.random.normal(v_mean, v_std, v_size)
x_yes=[]
x=[]
y=[]
i = 0
while i < 125:
x_yes.append(i)
x.append(i + v_noise[int(i/2.5)])
y.append((a / (2 * v0 * v0)) * i * i + v_noise[int(i/2.5)])
i += 2.5
print(np.array(x))
# print(np.array(y))
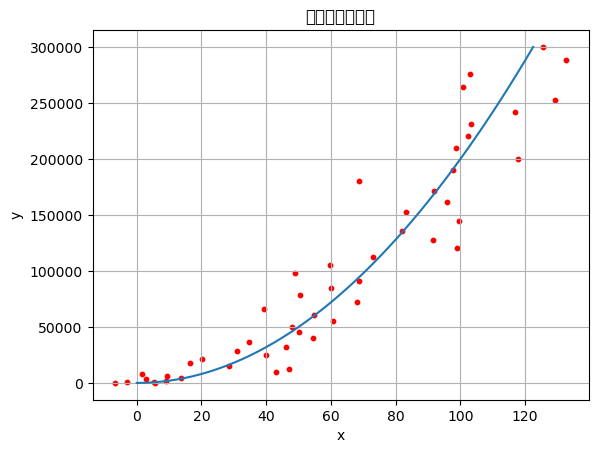
# 可视化GPS观测值
def f(v0,a,x):
return a / (2 * v0 * v0) * x * x
x_yes=np.array(x_yes)
y_yes=f(v0,a,x_yes)
plot_x=np.array(x)
plot_y=np.array(y)
plt.plot(x_yes, y_yes)
plt.scatter(np.array(x), np.array(y), color='red', s=10,label='Scatter Points')
plt.xlabel('x')
plt.ylabel('y')
plt.title('正确地函数图像')
plt.grid(True)
plt.show()
[ 5.69337282 -6.70358291 5.20005629 -3.1642016 8.96649194
2.94264948 13.54474922 9.46044031 1.76099155 43.01931628
47.01966072 28.63073915 16.40411915 20.11577761 39.86480856
30.82327806 45.97475314 34.66940635 54.58517651 50.00387652
47.91892513 60.73385031 54.91413202 39.44019536 68.19252353
50.53582145 59.89798001 68.57587787 48.83605511 59.76311512
73.09772855 98.94462715 91.60769251 82.04872022 99.62003629
83.34378037 95.74242137 91.96367793 68.64679766 97.84523285
117.93497059 98.53576392 102.31034303 103.28824097 116.82364354
129.11815046 100.81599905 102.9071149 132.63592741 125.57352857]
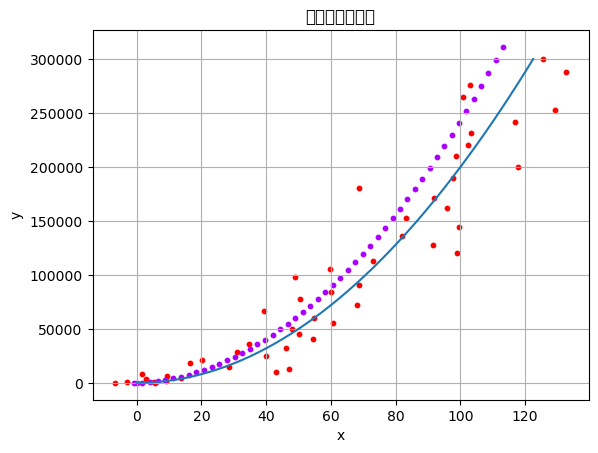
# 接下来用卡尔曼滤波对位置进行优化
# 初始状态值
x0=[0,0,10]
x0=np.array(x0)
# 初始概率分布
P0=[1,1,1]
P0=np.diag(P0)
# 运动
uk=[v0*delta_t,0.5*a*delta_t*delta_t,a*delta_t]
uk=np.array(uk)
# 运动噪声
R=[0,(0.5*w_std*delta_t*delta_t)**2,(w_std*delta_t)**2]
R=np.array(R)
# 观测噪声
Q=[v_std**2,v_std**2]
Q=np.array(Q)
# 状态转移矩阵
A=np.eye(3)
A[1,2]=delta_t
# 观测矩阵
C=np.zeros((2,3))
C[0,0]=1
C[1,1]=1
# 状态优化后存在这儿
x_youhua=[]
y_youhua=[]
xk=x0
Pk=P0
x_youhua.append(xk[0])
y_youhua.append(xk[1])
for i in range(len(x)):
# 预测
xk_=A@np.transpose(xk)+np.transpose(uk)
Pk_=A@Pk@np.transpose(A)+np.transpose(R)
# 更新,计算卡尔曼增益
K=Pk_@np.transpose(C)@np.linalg.inv(C@Pk_@np.transpose(C)+Q)
# 计算后验
zk=[x[i],y[i]]
zk=np.array(zk)
xk=xk_+K@(np.transpose(zk)-C@xk_)
x_youhua.append(xk[0]/100)
y_youhua.append(xk[1])
# 概率更新
Pk=(np.eye(3)-K@C)@Pk_
print(x_youhua)
print(y_youhua)
plt.plot(x_yes, y_yes)
plt.scatter(np.array(x), np.array(y), color='red', s=10,label='Scatter Points')
plt.scatter(np.array(x_youhua), np.array(y_youhua), color='#aa00ff', s=10,label='Scatter Points')
plt.xlabel('x')
plt.ylabel('y')
plt.title('正确地函数图像')
plt.grid(True)
plt.show()
[0, -0.8977579557697737, 1.6366917806739805, 4.0683872184309156, 6.471353440096884, 8.848372211339216, 11.243391061201583, 13.622318979303191, 16.004463980666014, 18.38009272996062, 20.754373672088995, 23.124839128637976, 25.492014548445674, 27.85566216195411, 30.21615534091654, 32.573677300614335, 34.927860264959584, 37.27904673078576, 39.62688464129918, 41.971820001546774, 44.31352585939875, 46.65205000286674, 48.98761157880422, 51.319965679035604, 53.648992531164694, 55.9753144938602, 58.29830493412377, 60.618348370732605, 62.93544754264797, 65.24922560564583, 67.5601153192075, 69.86816137069368, 72.17354593455498, 74.47582818848407, 76.77499057889487, 79.07141409977498, 81.36465103840312, 83.65510253915193, 85.94256118532503, 88.22677530520652, 90.50846610229773, 92.78752111979469, 95.06341998162775, 97.33648660313979, 99.60669487306275, 101.87422445866503, 104.13906951115028, 106.4006985292198, 108.65952981102059, 110.9159427170216, 113.16945743229525]
[0, -89.77579557697733, 286.16917806739826, 901.8387218430917, 1764.6353440096887, 2874.837221133921, 4236.839106120158, 5847.231897930319, 7707.946398066602, 9818.009272996063, 12177.9373672089, 14787.483912863798, 17646.701454844566, 20755.56621619541, 24114.115534091656, 27722.36773006143, 31580.28602649596, 35687.90467307858, 40045.18846412991, 44652.18200015468, 49508.85258593987, 54615.205000286674, 59971.26115788042, 65576.99656790355, 71432.39925311647, 77537.53144938602, 83892.33049341237, 90496.83483707326, 97351.0447542648, 104454.92256056458, 111808.51153192075, 119411.81613706937, 127264.8545934555, 135367.5828188484, 143719.99905788948, 152322.14140997748, 161173.9651038403, 170275.51025391518, 179626.7561185325, 189227.67753052065, 199078.34661022975, 209178.75211197947, 219528.8419981628, 230128.64866031398, 240978.1694873063, 252077.4224458665, 263426.40695111506, 275025.069852922, 286873.45298110205, 298971.59427170217, 311319.4457432295]
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











