






好的,以下是包含 Isaac Gym、VisFly、NavRL、MuJoCo 和 Gazebo 五个工具/平台的对比表。我将根据无人机仿真、路径规划、强化学习等任务的特点进行对比,帮助你选择最适合的工具。
无人机仿真工具对比
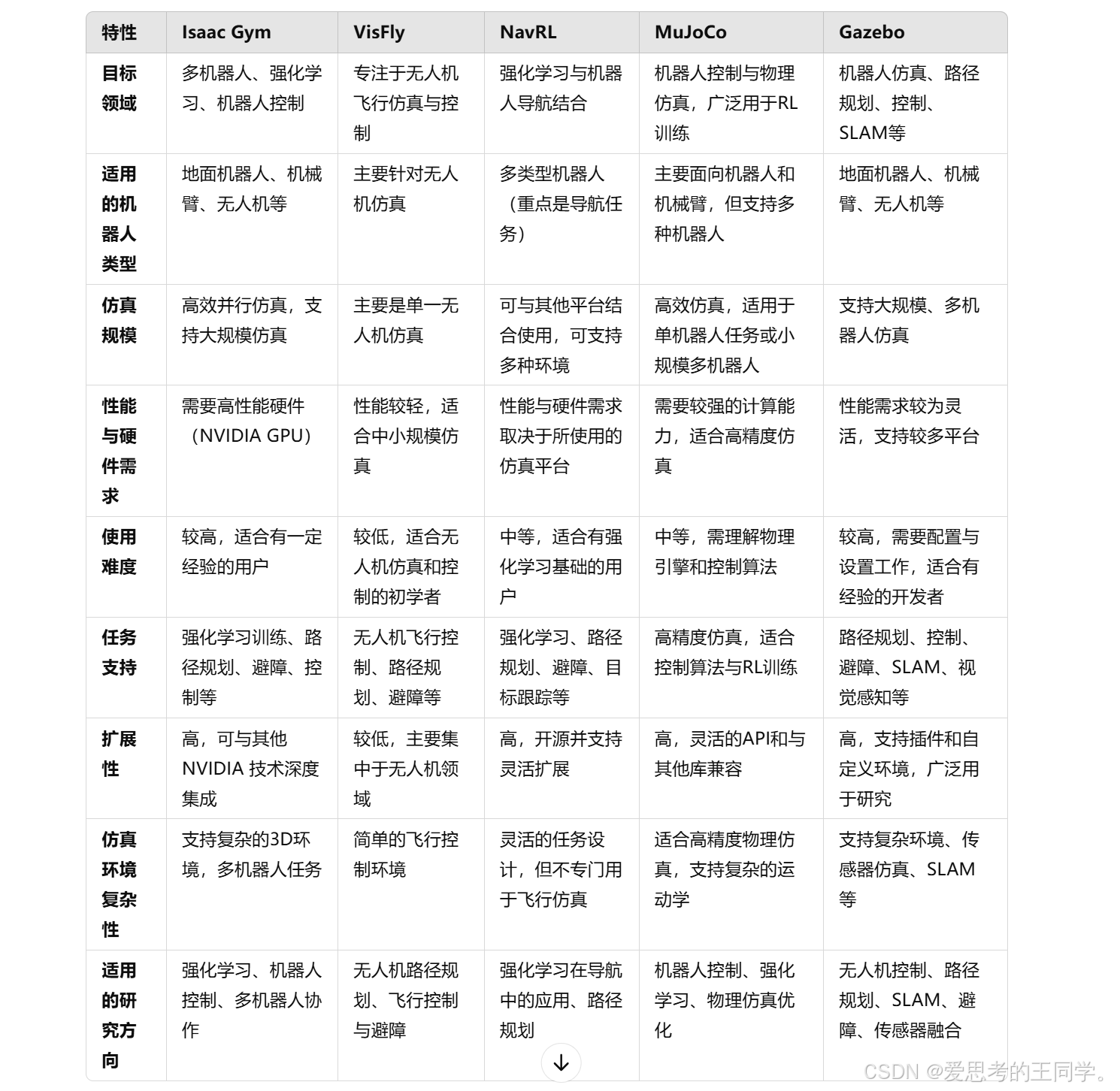
| 特性 | Isaac Gym | VisFly | NavRL | MuJoCo | Gazebo |
|---|---|---|---|---|---|
| 目标领域 | 多机器人、强化学习、机器人控制 | 专注于无人机飞行仿真与控制 | 强化学习与机器人导航结合 | 机器人控制与物理仿真,广泛用于RL训练 | 机器人仿真、路径规划、控制、SLAM等 |
| 适用的机器人类型 | 地面机器人、机械臂、无人机等 | 主要针对无人机仿真 | 多类型机器人(重点是导航任务) | 主要面向机器人和机械臂,但支持多种机器人 | 地面机器人、机械臂、无人机等 |
| 仿真规模 | 高效并行仿真,支持大规模仿真 | 主要是单一无人机仿真 | 可与其他平台结合使用,可支持多种环境 | 高效仿真,适用于单机器人任务或小规模多机器人 | 支持大规模、多机器人仿真 |
| 性能与硬件需求 | 需要高性能硬件(NVIDIA GPU) | 性能较轻,适合中小规模仿真 | 性能与硬件需求取决于所使用的仿真平台 | 需要较强的计算能力,适合高精度仿真 | 性能需求较为灵活,支持较多平台 |
| 使用难度 | 较高,适合有一定经验的用户 | 较低,适合无人机仿真和控制的初学者 | 中等,适合有强化学习基础的用户 | 中等,需理解物理引擎和控制算法 | 较高,需要配置与设置工作,适合有经验的开发者 |
| 任务支持 | 强化学习训练、路径规划、避障、控制等 | 无人机飞行控制、路径规划、避障等 | 强化学习、路径规划、避障、目标跟踪等 | 高精度仿真,适合控制算法与RL训练 | 路径规划、控制、避障、SLAM、视觉感知等 |
| 扩展性 | 高,可与其他 NVIDIA 技术深度集成 | 较低,主要集中于无人机领域 | 高,开源并支持灵活扩展 | 高,灵活的API和与其他库兼容 | 高,支持插件和自定义环境,广泛用于研究 |
| 仿真环境复杂性 | 支持复杂的3D环境,多机器人任务 | 简单的飞行控制环境 | 灵活的任务设计,但不专门用于飞行仿真 | 适合高精度物理仿真,支持复杂的运动学 | 支持复杂环境、传感器仿真、SLAM等 |
| 适用的研究方向 | 强化学习、机器人控制、多机器人协作 | 无人机路径规划、飞行控制与避障 | 强化学习在导航中的应用、路径规划 | 机器人控制、强化学习、物理仿真优化 | 无人机控制、路径规划、SLAM、避障、传感器融合 |
总结:
-
Isaac Gym:
- 优点:适合进行 强化学习 和 多机器人仿真,支持高并发任务,特别适用于大规模、多机器人任务的训练。具有高效的物理引擎(基于 NVIDIA PhysX)和大规模并行训练能力。
- 缺点:需要 高性能硬件(如 NVIDIA GPU),配置较复杂,学习曲线陡峭,可能不适合非常简单的应用。
-
VisFly:
- 优点:专注于 无人机仿真,提供飞行控制、路径规划、避障等任务的快速实现。界面友好,易于上手,非常适合无人机控制和规划的初学者。
- 缺点:功能较为单一,主要面向 无人机,不适合复杂的多机器人协作和大规模仿真。
-
NavRL:
- 优点:适合进行 强化学习 任务,尤其是在 导航任务 中的应用。支持灵活的环境设置,并能与其他仿真平台(如 Gazebo、Isaac Gym)结合。
- 缺点:虽然支持多类型机器人,但更侧重于 导航和路径规划,不如其他平台(如 Gazebo)那样支持广泛的机器人任务。
-
MuJoCo:
- 优点:提供 高精度物理仿真,适合进行精细的控制任务和强化学习训练。对于 机器人控制 和复杂的物理仿真任务非常有用。
- 缺点:虽然支持无人机仿真,但主要用于 单机器人 的精确控制任务,对 大规模多机器人仿真 支持较弱。
-
Gazebo:
- 优点:非常成熟的 机器人仿真平台,广泛应用于 路径规划、SLAM、避障、控制算法 的研究。支持多种 机器人类型,包括无人机,且有丰富的 插件 和 传感器模拟。支持 ROS 集成,非常适合用于开发与测试机器人的多种算法。
- 缺点:配置和使用较为复杂,性能可能不如 Isaac Gym 在并行训练时的效率,仿真速度相对较慢。
适合人群:
- Isaac Gym:适合需要大规模并行仿真、强化学习训练和多机器人协作的开发者,尤其是对无人机有复杂控制或多任务需求的研究者。
- VisFly:适合无人机路径规划、飞行控制和避障的入门级开发者,想要快速上手并测试算法。
- NavRL:适合需要强化学习来优化机器人导航任务的开发者,尤其是有一定 强化学习 和 路径规划 基础的人。
- MuJoCo:适合那些需要高精度物理仿真和机器人控制的开发者,特别是在强化学习和控制算法上有较高要求的用户。
- Gazebo:适合那些需要 综合仿真环境(包括 SLAM、传感器、路径规划等)的开发者,尤其是想结合 ROS 开发的机器人应用。
总结:
- 如果你主要 专注于无人机的飞行控制、路径规划和避障,VisFly 是一个快速上手的选择。
- 如果你需要 大规模仿真 和强化学习训练,尤其是多机器人任务,Isaac Gym 会是一个强大的工具。
- 如果你需要进行高精度的 物理仿真,并且侧重于控制算法,MuJoCo 会是非常合适的选择。
- Gazebo 是一个非常成熟且多功能的仿真平台,适合多种应用,特别是与 ROS 配合使用时。
希望这个对比表能够帮助你根据自己的需求做出选择!如果你有其他问题,随时告诉我!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









