






一、三相/五相PMSM
电机类型
可模拟三相或五相永磁同步电机,涵盖不同拓扑结构:
三相电机:支持正弦或梯形反电动势(EMF)波形,转子类型根据EMF波形自适应:
正弦EMF → 圆形转子( smooth rotor)
梯形EMF → 凸极转子( salient-pole rotor)
五相电机:固定为正弦EMF波形 + 圆形转子,适用于高功率密度场景。
(三相电机与五相电机对比:
)
(反电动势(EMF)波形与转子结构的关联
正弦EMF:
要求气隙均匀:为了生成标准的正弦波形,转子磁场必须与定子绕组轴线严格对齐,且气隙(定子与转子间的间隙)均匀。
圆形转子(Smooth Rotor):转子表面为光滑圆柱形,永磁体均匀分布在转子表面(如表贴式设计)。这种结构确保气隙磁导恒定,从而产生平滑的正弦EMF。
应用场景:高精度控制(如FOC算法)、伺服系统、电动汽车主驱电机。
梯形EMF:
需要气隙非均匀性:梯形波形包含陡峭的上升/下降沿和较平缓的顶点,需通过凸极转子(Salient-Pole Rotor)的磁路不对称性来实现。
凸极转子(Salient-Pole Rotor):转子具有突出的磁极(如内嵌式永磁体),导致气隙在不同角度下不等,从而在绕组中感应出梯形波EMF。
应用场景:低成本驱动(如风机、水泵)、方波PWM逆变器适配。
)
电气特性配置
定子绕组连接:星形(Y型)接法,中性点内置,支持三相平衡运行及零序电流分析。
反电动势(EMF)生成:基于永磁体励磁,波形可配置为标准正弦或梯形(如方波PWM逆变器适配)。
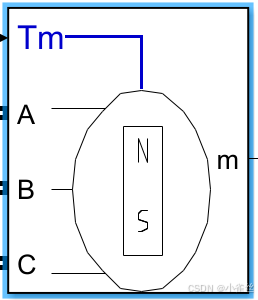
机械接口
机械输入:扭矩指令 T_m(单位通常为 N·m 或 kW),用于模拟负载或驱动扭矩。
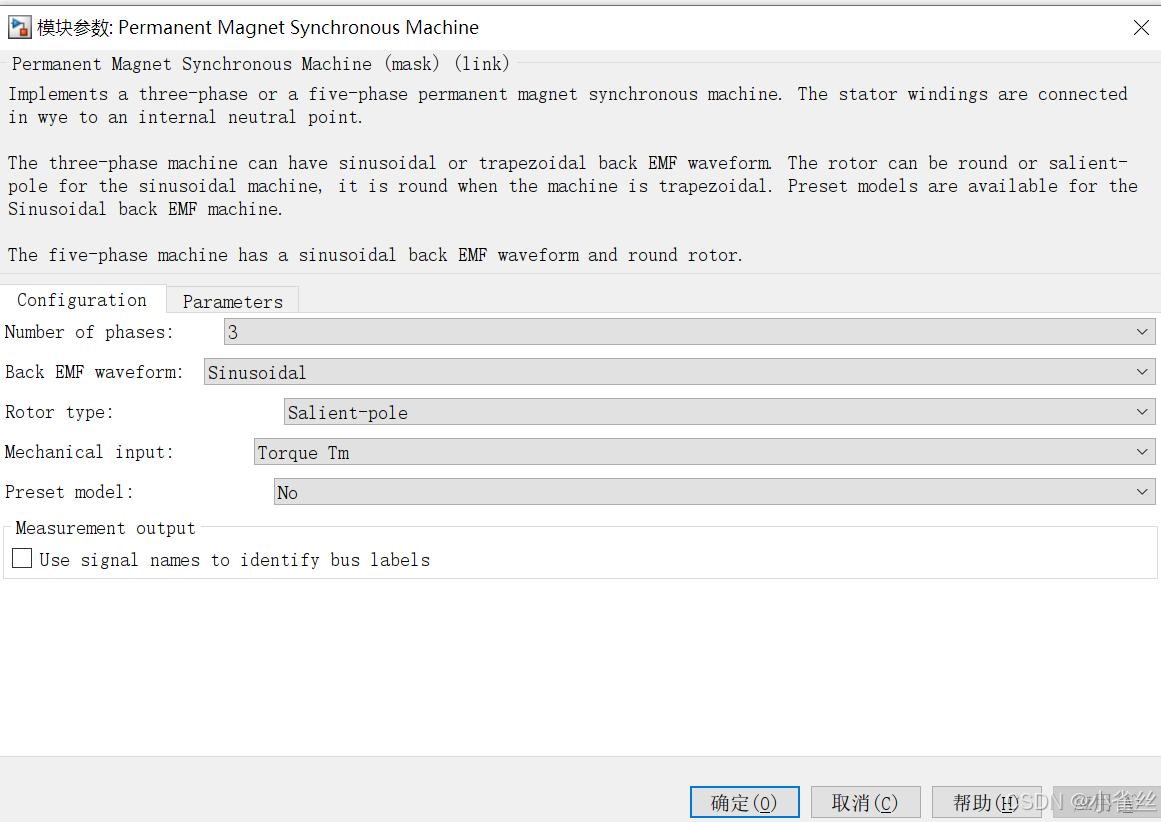
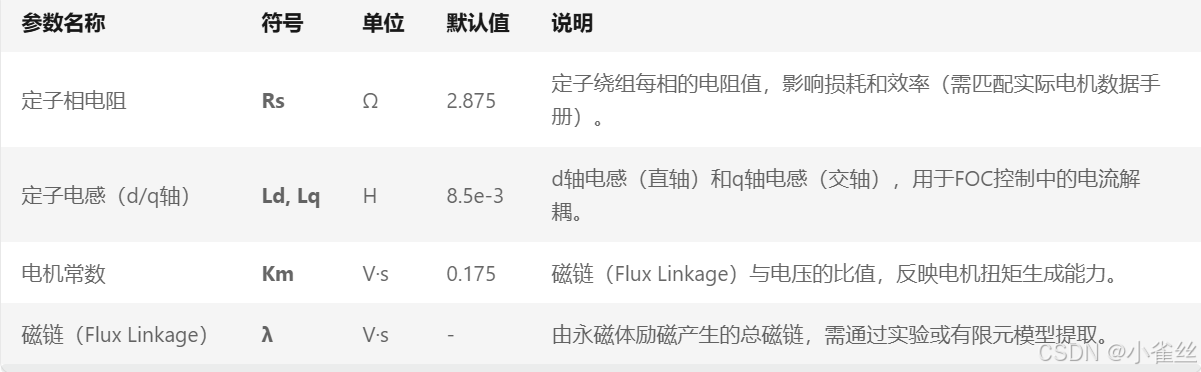
参数介绍:
相数(Number of phases) :选择电机相数(3相或5相)。五相电机需更高频逆变器,但转矩波动更小。 五相电机仅支持正弦EMF。
反电动势波形(EMF waveform) :选择正弦(Sinusoidal)或梯形(Trapezoidal)。 Sinusoidal 梯形波需匹配凸极转子,正弦波需圆形转子。
**转子类型(Rotor type)** : 圆形(Round)或凸极(Salient-pole)。Salient-pole(凸极)
需与EMF波形兼容:正弦EMF→圆形转子;梯形EMF→凸极转子。
**预设模型(Preset model)** :选择预定义模型(如"标准三相表贴式"),自动填充参数。 无 加速仿真配置,适用于典型工况。
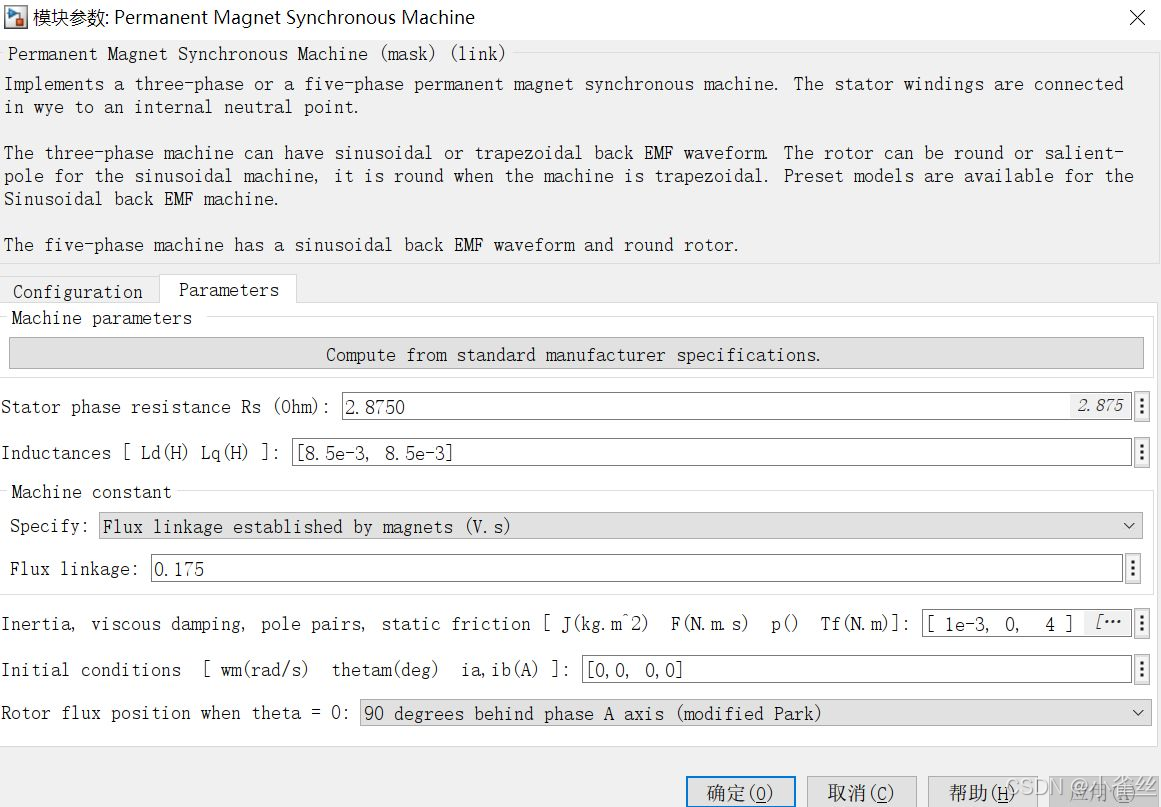
参数介绍:

转子磁通位置
参数:Rotor flux position when theta =: 90 degrees behind phase A axis (modified Park)
含义:在改进的Park变换坐标系中,转子磁通的初始角度(相对于相A轴滞后90°)。
作用:用于定义转子磁场的空间位置,是FOC算法中角度估计的基础。
典型值:0°(对齐定子d轴)或90°(对齐q轴),需与实际控制器的初始位置一致。
二.通用桥式电路
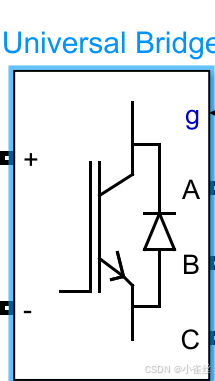
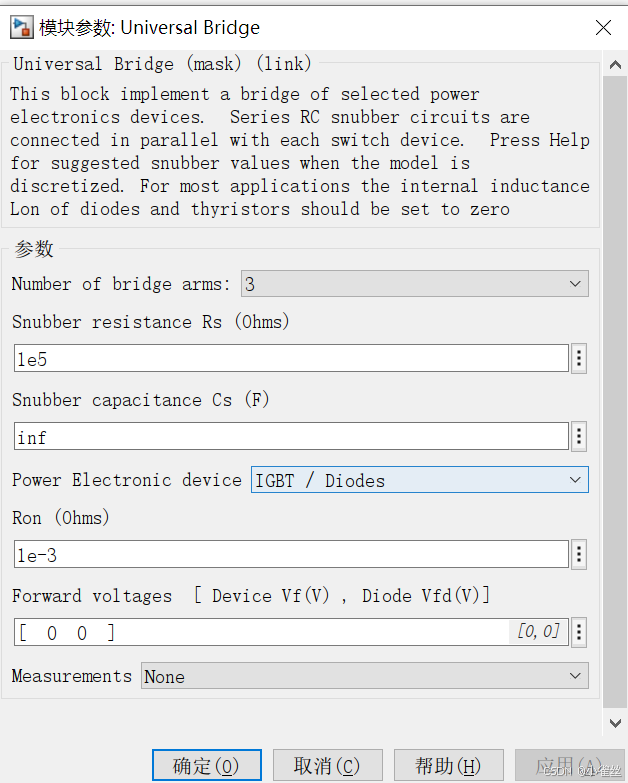
**桥臂数量(Arms)**
桥式电路的“臂数”决定电路的结构和功能。
3相桥:通常由6个开关器件(如IGBT或二极管)组成,模块可能将其抽象为半桥或简化结构,用户仅需配置臂数,内部自动处理拓扑。
常见场景:
3相逆变桥:驱动交流电机(如电动汽车)。
H桥:直流电机调速或升降压电路。
配置建议
用户输入3表示三相桥,实际对应6个开关(模块内部隐藏细节)。
注意:桥臂数越多,电路复杂度越高,需匹配更高性能的逆变器。
缓冲电阻(Snubber Resistance, Rs)
吸收电压尖峰:当开关器件(如IGBT)关断时,感性负载会产生高压尖峰,Rs与电容Cs组成RC网络吸收能量。
抑制振荡:防止关断瞬间因寄生电容与电感形成的LC回路引发高频振荡。
缓冲电容(Snubber Capacitance, Cs)
与电阻Rs串联,形成RC吸收网络,共同吸收尖峰能量。
禁用缓冲:设为inf(无穷大)表示关闭Snubber(需谨慎操作)。
电力电子器件(Power Electronic Device)
选择开关器件类型,决定电路特性:
IGBT:适用于高电压、大电流场景(如电动汽车主驱)。
二极管:用于整流或续流(如UPS电源)。
MOSFET:低电压、高速场景(如DC-DC转换)。
导通电阻(Ron)
表征器件导通时的电阻,直接影响导通损耗(P_loss = I^2 * Ron)。
低Ron:减少损耗,但可能降低开关速度(如IGBT的Ron≈0.1mΩ)。
高Ron:开关速度快,但损耗增大(如MOSFET的Ron≈10mΩ)。
正向电压(Forward Voltages)
二极管:正向导通电压(如硅管0.7V,快恢复管0.1V)。
IGBT:饱和压降(Vce(sat),如0.5V)。
三.PI模块
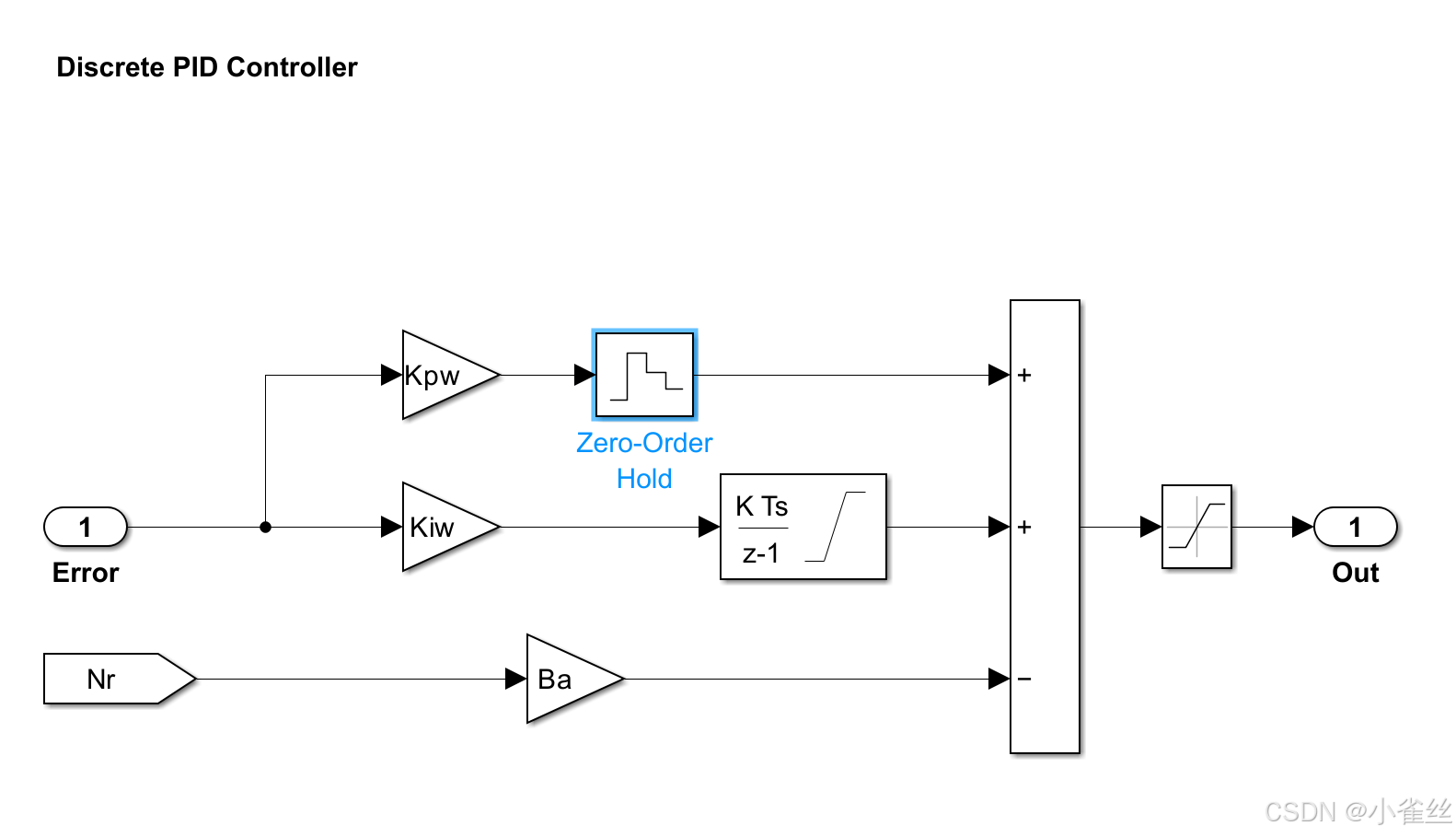
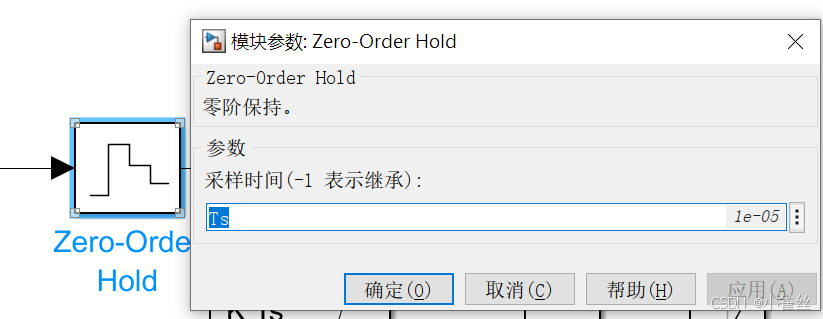
这个模块叫做 零阶保持器(Zero-Order Hold),是 Simulink 中用来控制信号采样和保持的工具。
想象你在用相机拍照:
每隔 1秒 拍一张照片(这就是「采样周期」)。
零阶保持器的作用是:在两次拍照的 1秒间隔内,始终显示上一张照片的画面,不让画面突然变化。
如果你拍的是一张包含多个物体的照片(比如一个三维坐标 (x,y,z)),那么这三个数值在 1秒内 都会一起保持不变。
应用场景
离散化连续信号
在数字控制系统中,传感器可能是连续采样的(如每毫秒一次),但控制器只需要每秒处理一次。用零阶保持器把中间值「冻住」,避免控制器被高频数据轰炸。
多速率系统协调
当不同模块的采样率不匹配时,用零阶保持器隔离它们,防止信号频率冲突。
简化向量/矩阵处理
如果需要对一组相关信号(如温度、压力、位置)同步采样,直接用零阶保持器打包处理,不用单独设置每个信号。
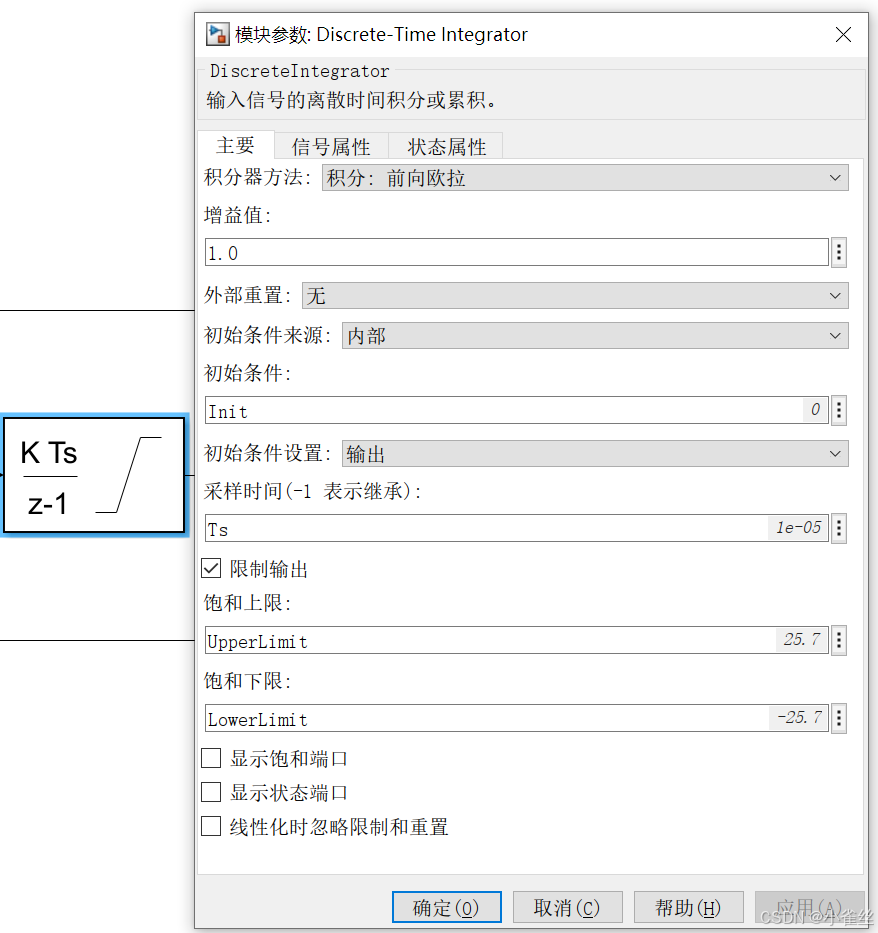
离散时间积分器:将离散信号累加处理
限幅模块:
**(1) 防止执行机构过载**
执行器的物理限制:
例如,电机驱动器的输出电压范围是 0~10V,若PID计算出的输出为 12V,直接驱动会导致电机绕组烧毁或逆变器损坏。
图中体现:
限幅模块将输出约束在 [−Limit, +Limit] 范围内(如 −10V ≤ Out ≤ +10V)。
**(2) 抑制积分项饱和**
积分控制的副作用:
在长期稳态误差下,积分项会持续累加(如 ∑Error 不断增大),导致输出信号无限增长。
限幅可阻止积分项溢出,避免控制量超出执行器能力范围。
示例:
若目标温度为 100℃,但传感器反馈始终为 50℃,积分项会不断增加 Kiw×(100−50),最终输出可能超过加热器最大功率。
**(3) 避免系统振荡**
高增益下的不稳定:
若 Kpw(比例增益)或 K Ts(微分增益)设置过高,输出信号可能剧烈振荡。
限幅可限制振荡幅度,防止系统发散(如电机转速疯狂波动)。
类比:
小汽车油门踏板若无限制,踩到底会导致发动机爆缸;限幅相当于“自动挡”的最大油门限制。
**(4) 应对外部扰动**
干扰导致输出突变:
如突加负载或传感器噪声,可能导致PID输出瞬间过大。
限幅可吸收冲击,确保输出平滑过渡(如阀门开度从 50% 突然跳变到 150% 会被限制在 100%)。
2. 限幅的实现方式
**(1) 硬件限幅**
执行器内置保护:
电机驱动器通常自带硬件限幅(如通过二极管钳位或MOSFET开关限制电压)。
图中隐含设计:
限幅模块可能集成在 Out 端(如标注 ±10V),确保输出不超过物理边界。
**(2) 软件限幅**
数字PID中的饱和处理
四.三相电压电流测量模块
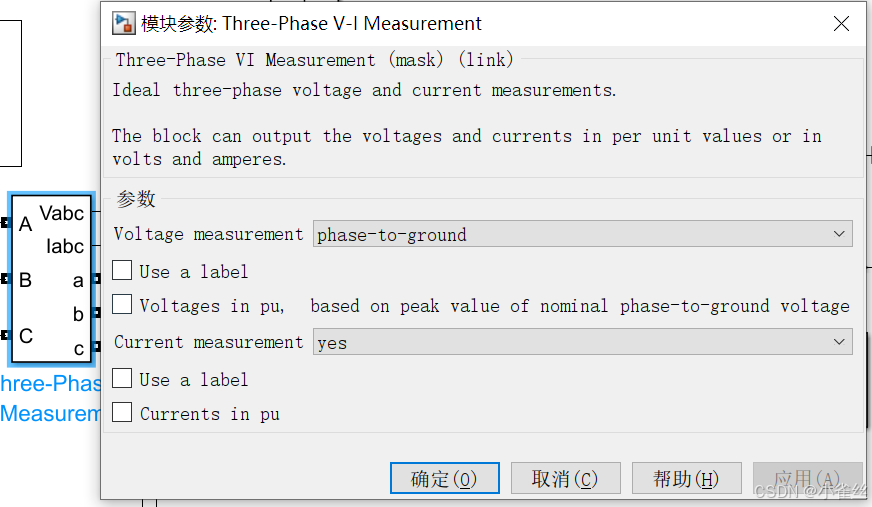
模块核心功能
该模块用于 理想三相电压和电流的精确测量,支持以下特性:
双单位输出:
标幺值(pu):基于标称相地电压峰值的归一化单位(便于系统级分析)。
实际物理量(V/A):直接输出电压(伏特)和电流(安培)的绝对值。
灵活的信号标记:
可为电压/电流信号添加自定义标签(如U_a, I_b),兼容MATLAB/Simulink等仿真平台。
理想化设计:
不考虑测量误差(如阻抗、温度漂移),专注于信号建模与分析。
参数介绍
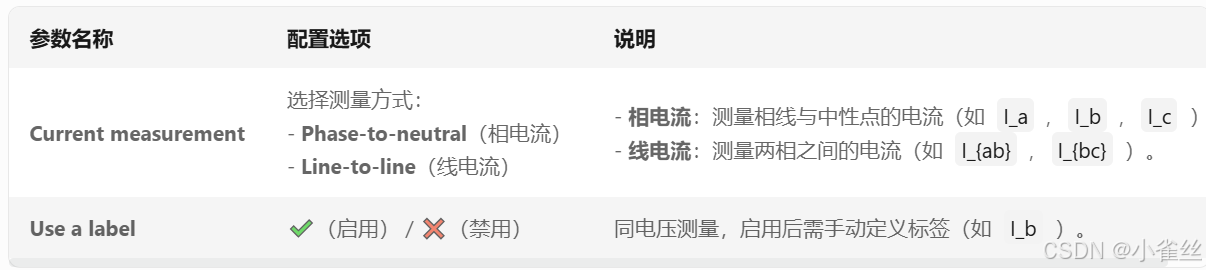
该模块通过 灵活的测量模式 和 双单位输出,满足电力系统分析、电机控制、电网监测等场景的需求。用户需重点关注:
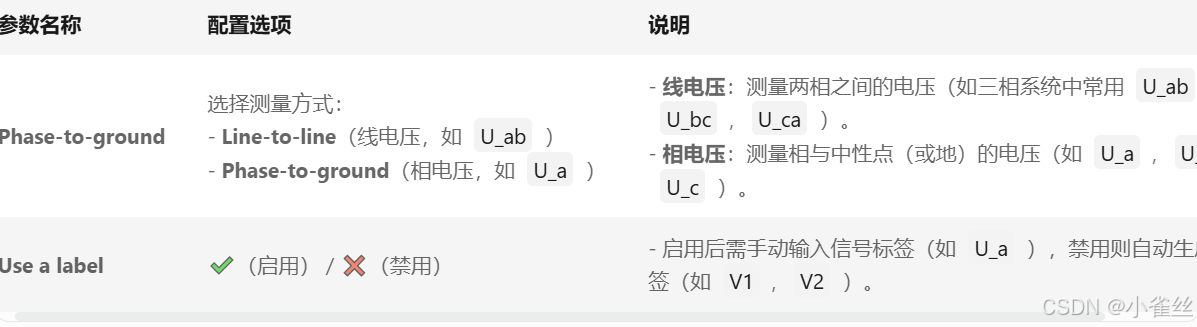
测量方式选择:根据实际需求选择相电压(Phase-to-ground)或线电压(Line-to-line)。
标幺值标定:正确设置标称峰值以确保单位一致性。
信号标签管理:启用标签提升仿真结果的可读性和复用性。


















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









