







 本文详细描述了如何在Piccolo小引擎中利用SceneQuery实现物理碰撞检测,包括角色遇到墙壁时的位移调整,通过计算水平投影来确定滑动距离。作者给出了move函数的代码示例,展示了如何处理垂直和水平方向的碰撞以及位移修正。
本文详细描述了如何在Piccolo小引擎中利用SceneQuery实现物理碰撞检测,包括角色遇到墙壁时的位移调整,通过计算水平投影来确定滑动距离。作者给出了move函数的代码示例,展示了如何处理垂直和水平方向的碰撞以及位移修正。
目录
前言
物理系统的作用是模拟和处理物体之间的物理行为和交互,物理系统在引擎中扮演着模拟和处理物体之间物理行为的角色,使游戏或应用程序更加真实、逼真和互动。它可以为物体提供真实的运动、碰撞和力学效果,增强用户体验并丰富游戏世界的交互性。
一、实现物理碰撞检测
在Piccolo小引擎代码中找到Piccolo/engine/source/runtime/function/controller/character_controller.cpp,找到move函数修改代码,利用SceneQuery实现具有相对真实物理表现的character controller:如可跳至平台上,跳起后空中碰到墙壁可以落回地面,前进碰到墙壁可以自动调整位移方向等。
对于前进碰到墙壁可以自动调整位移方向我的理解是:
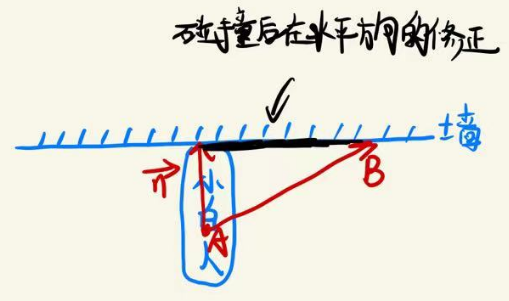
小机器人在遇到墙体的时候,假定它斜着走(一直往前走,故意撞墙),那么应该会有向左或者向右滑动的趋势,那么会滑动多少距离呢?答案就是位移向量AB在水平方向的一个投影大小(黑色部分),因为最终答案返回的是一个向量,所以用投影大小去乘x方向的一个单位向量即可,那投影如何计算呢,我们就需要用到额外一个向量(AB向量与法向量的差,在代码中命名为thirdv向量),此时有了thirdv,有
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









