






I2C通讯设备之间的常见连接方式
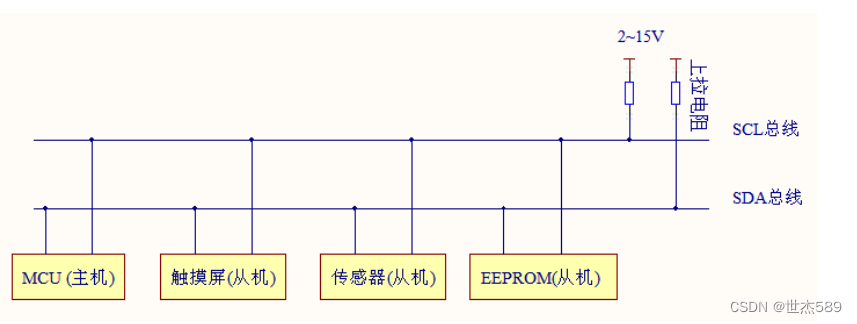
物理层有如下特点:
1.在一个I2C通讯总线中,可连接多个I2C通讯设备,支持多个通讯主机及多个通讯从机。
2.一个I2C总线只使用两条总线线路,一条双向串行数据线(SDA),一条串行时钟线(SCL)。数据线即用来表示数据,时钟线用于数据收发同步。
3.每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问。
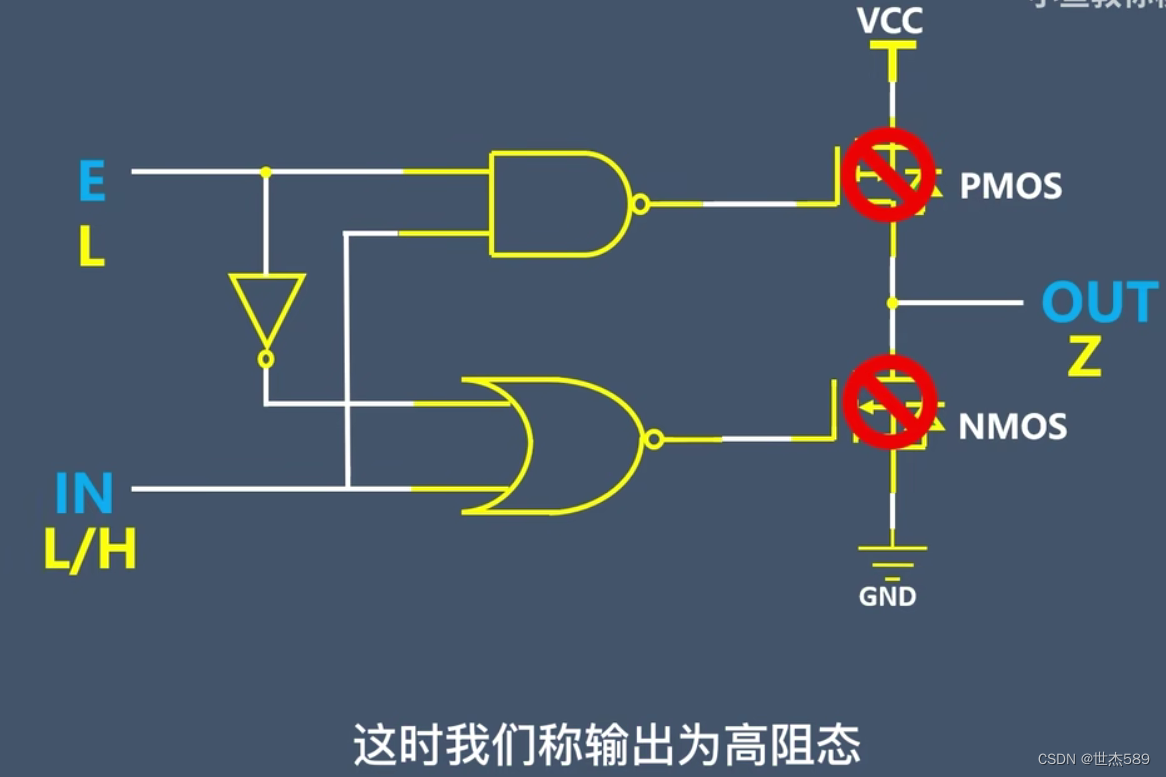
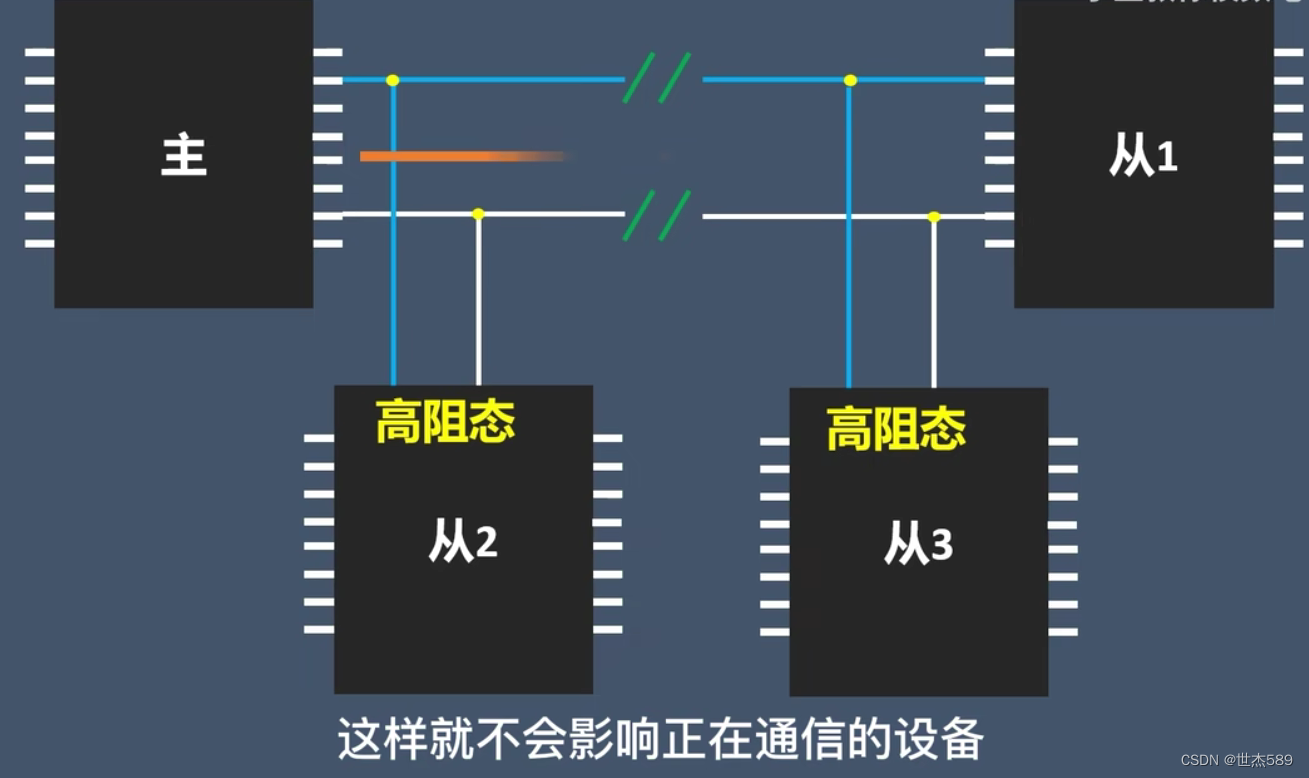
4.总线通过上拉电阻接到电源。当I2C设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
5.多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
6.具有三种传输模式:标准模式传输速率为100kbit/s,快速模式为400kbit/s,高速模式下可达3.4Mbit/s,但目前大多I2C设备尚不支持高速模式。7.连接到相同总线的IC数量受到总线的最大电容400pF限制。
协议层
I2C的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节。
I2C基本读写过程
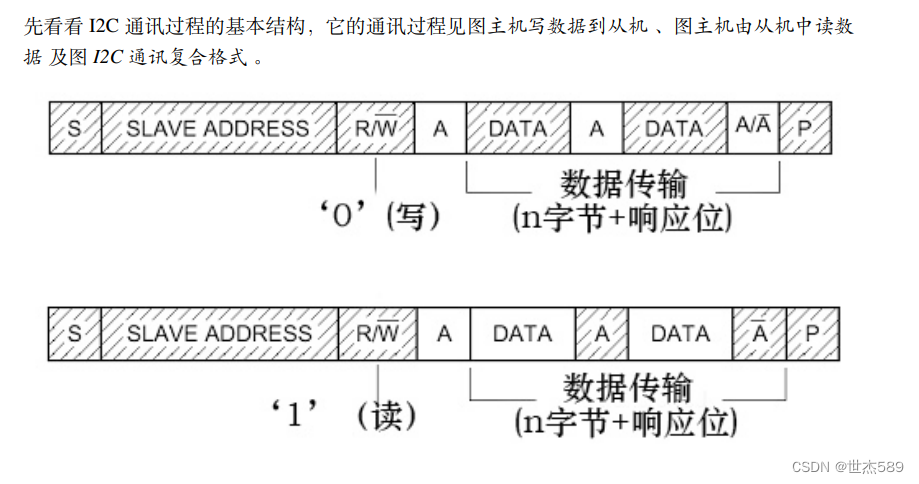
起始信号产生后,所有从机就开始等待主机紧接下来广播的从机地址信号(SLAVE_ADDRESS)。在I2C总线上,每个设备的地址都是唯一的,当主机广播的地址与某个设备地址相同时,这个设备就被选中了,没被选中的设备将会忽略之后的数据信号。
根据I2C协议,这个从机地址可以是7位或10位。在地址位之后,是传输方向的选择位,该位为0时,表示后面的数据传输方向是由主机传输至从机,即主机向从机写数据。该位为1时,则相反,即主机由从机读数据。
从机接收到匹配的地址后,主机或从机会返回一个应答(ACK)或非应答(NACK)信号,只有接收到应答信号后,主机才能继续发送或接收数据。
写数据
若配置的方向传输位为“写数据”方向,即第一幅图的情况,广播完地址,接收到应答信号后,主机开始正式向从机传输数据(DATA),数据包的大小为8位,主机每发送完一个字节数据,都要等待从机的应答信号(ACK),重复这个过程,可以向从机传输N个数据,这个N没有大小限制。当数据传输结束时,主机向从机发送一个停止传输信号(P),表示不再传输数据。
读数据
若配置的方向传输位为“读数据”方向,即第二幅图的情况,广播完地址,接收到应答信号后,从机开始向主机返回数据(DATA),数据包大小也为8位,从机每发送完一个数据,都会等待主机的应答信号(ACK),重复这个过程,可以返回N个数据,这个N也没有大小限制。当主机希望停止接收数据时,就向从机返回一个非应答信号(NACK),则从机自动停止数据传输。
I2C时序结构
特点:
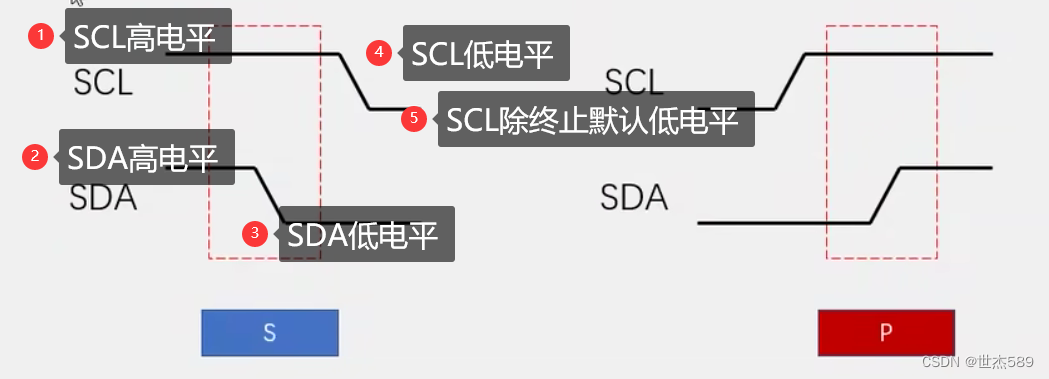
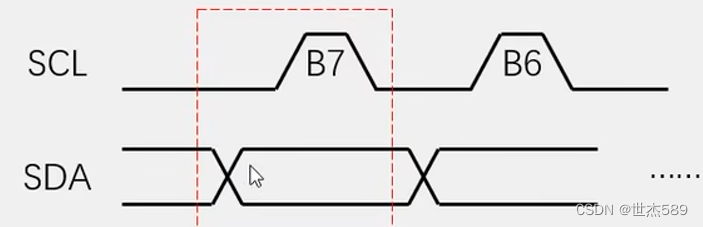
数据传输,SCL高电平不许动SDA
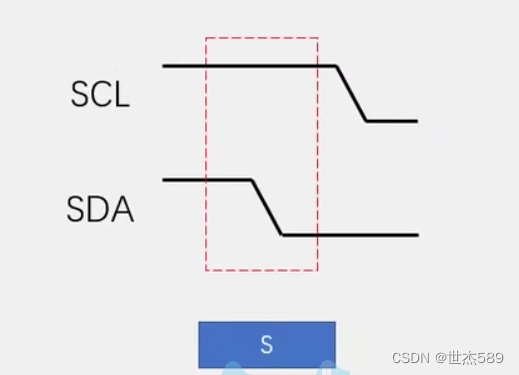
起始终止 SCL高电平必须动SDA
除了终止SCL是高电平,所有单元都会保证SCL以低电平结束
起始条件:SCL高电平期间,SDA从高电平切换到低电平
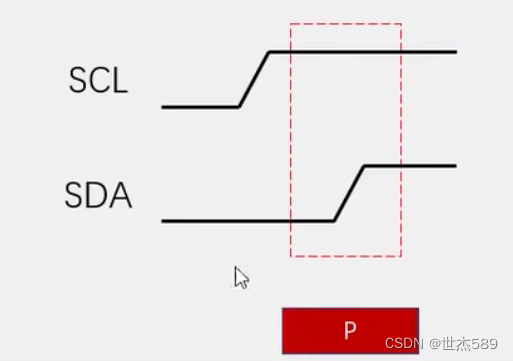
终止条件:SCL高电平期间,SDA从低电平切换到高电平
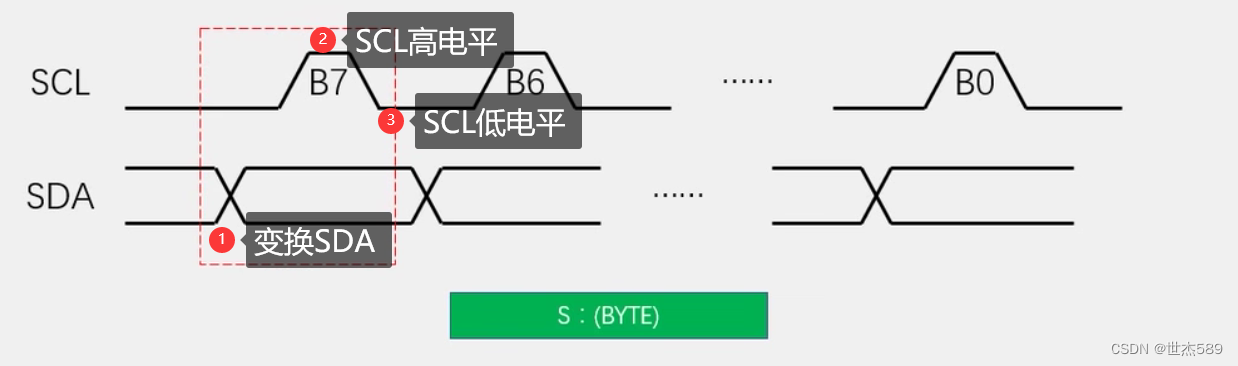
发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上,然后拉高SCL,从机在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节
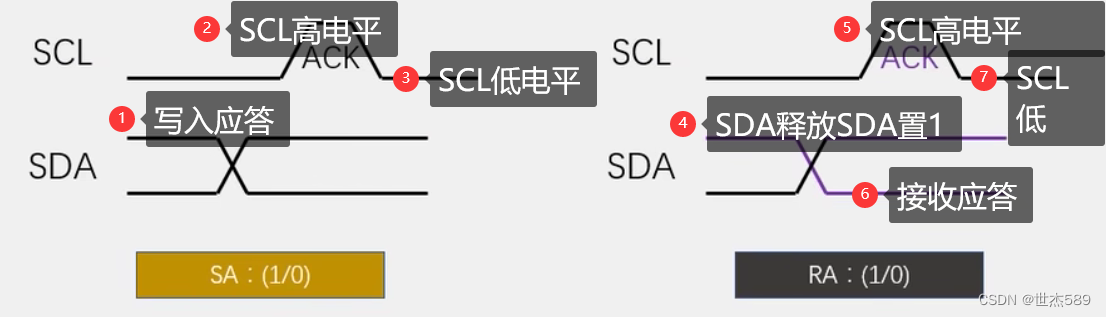
发送应答:在接受完一个字节后,主机下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
接收应答:在发送完一个字节以后,主机在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
I2C数据帧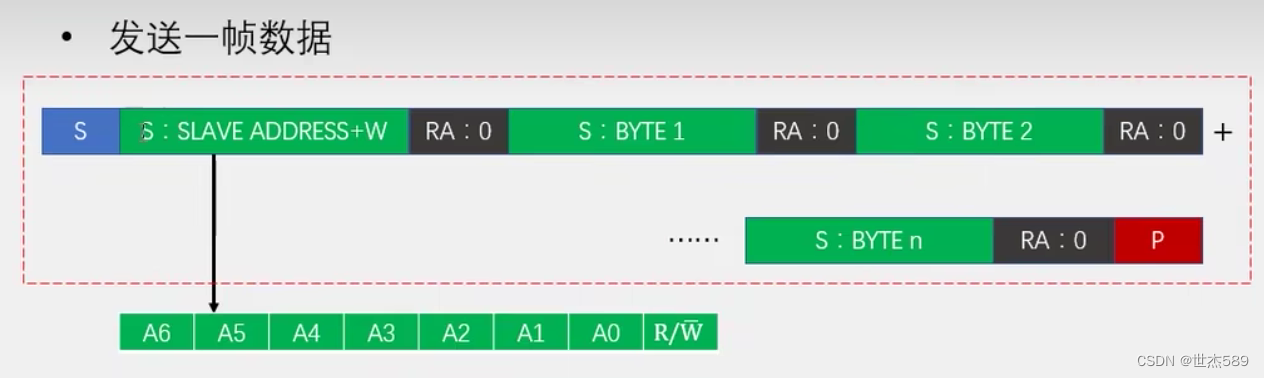
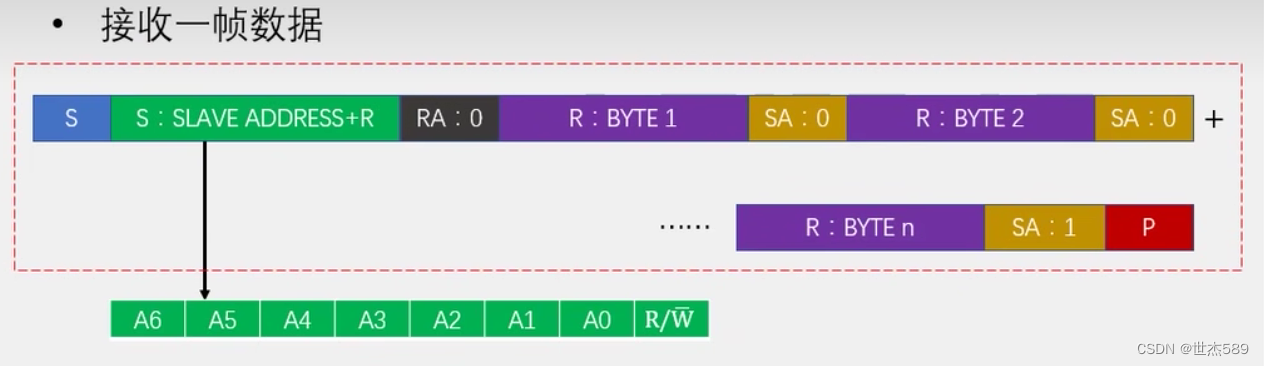
AT24C02数据帧


AT24C02的固定地址为1010,可配置地址本开发板上为000,所以SLAVE ADDRESS+W为0xA0,
SLAVE ADDRESS +R 为0xA1
GPIO初始化,SDA,SCL都置1
void MyI2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_OD;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_7);
}
写SDA,SCL的函数,写完等待10us
void MyI2C_W_SCL(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB,GPIO_Pin_6,(BitAction)BitValue); //非0即1,写0x80也是1
wait_us(10);
}
void MyI2C_W_SDA(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB,GPIO_Pin_7,(BitAction)BitValue);
wait_us(10);
}读SDA
uint8_t MyI2C_R_SDA(void)
{
uint8_t BitValue;
BitValue=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7);
wait_us(10);
return BitValue;
}
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);
MyI2C_W_SCL(0);
}
除了终止条件,SCL是高电平,所有单元都会保证SCL以低电平结束
void MyI2C_Start(void)
{
MyI2C_W_SDA(0);
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
}
发送先发最高位,应该是反转一下一下为1us一周期则为2us,1/2us=500khz

void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for(i=0;i<8;i++)
{
MyI2C_W_SDA(Byte&(0x80>>1));
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
}
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t data=0x00,i;
for(i=0;i<8;i++)
{
MyI2C_W_SCL(1);
if(MyI2C_R_SDA()==1){Byte|=(0x80>>i);}
MyI2C_W_SCL(0);
}
}
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1); //主机释放SDA
MyI2C_W_SCL(1);
AckBit=MyI2C_R_SDA();
MyI2C_W_SCL(0);
return AckBit;
}
读取EEPROM
void AT24C02_WriteByte(uint8_t Address,uint8_t data)
{
MyI2C_Start();
MyI2C_SendByte(AT24C02_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(Address);
MyI2C_ReceiveAck();
MyI2C_SendByte(data);
MyI2C_ReceiveAck();
My_I2C_Stop();
}
uint8_t AT24C02_ReadByte(uint8_t Address)
{
uint8_t data;
MyI2C_Start();
MyI2C_SendByte(AT24C02_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(Address);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(AT24C02_ADDRESS|0x01);
MyI2C_ReceiveAck();
data=MyI2C_ReceiveByte();
MyI2C_SendAck(1);
My_I2C_Stop();
return data;
}
int main(void)
{
OLED_Init();
MyI2C_Init();
uint8_t data;
AT24C02_WriteByte(2,66);
wait_us(5);
data =AT24C02_ReadByte(2);
OLED_ShowNum(1,1,data,3);
while(1)
{
}
}















 694
694











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









