







基于STM32单片机的太阳能追光系统设计
摘要:
本文设计并实现了一个基于STM32单片机的太阳能追光系统。该系统通过光敏电阻检测四个方向的光线强度,利用LCD1602显示当前光线状态及系统工作模式,能够自动或手动控制直流电机和步进电机以调整太阳能板的角度,确保太阳能板始终对准太阳,从而最大化太阳能的收集效率。
关键词:STM32;太阳能追光;光敏电阻;LCD1602;直流电机;步进电机
一、引言
随着可再生能源的日益重要,太阳能作为一种清洁、可再生的能源受到了广泛关注。然而,太阳能的收集效率受到太阳角度的影响。因此,设计一种能够自动跟踪太阳的追光系统具有重要意义。本文设计了一个基于STM32单片机的太阳能追光系统,通过光敏电阻检测光线强度,利用电机驱动太阳能板转动,实现了太阳能的高效收集。
二、系统总体设计
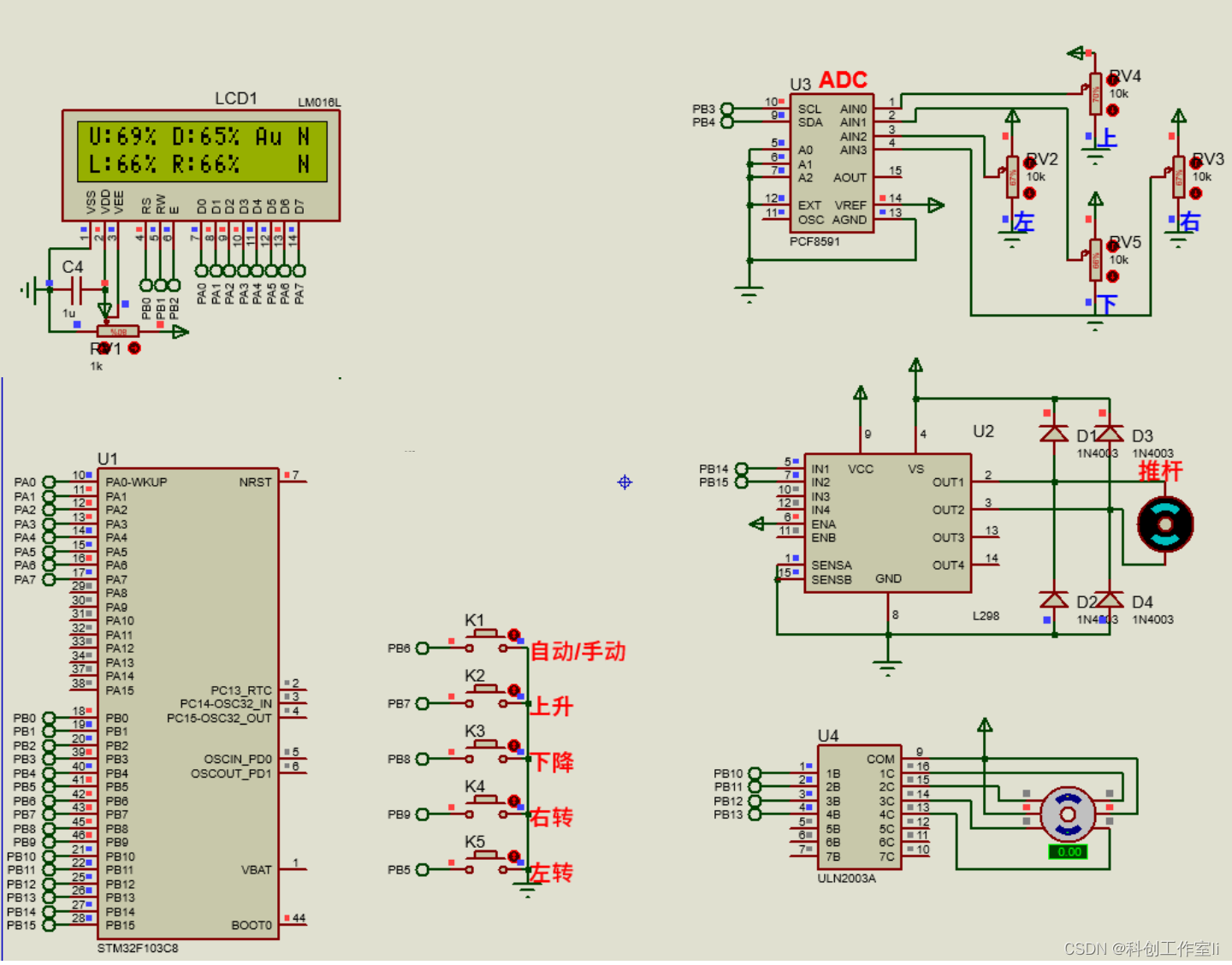
本系统主要由STM32单片机、光敏电阻、LCD1602显示屏、直流电机、步进电机、按键开关等部分组成。STM32单片机作为系统的控制核心,负责读取光敏电阻的值,根据光线强度控制电机的转动,同时控制LCD1602显示相关信息。系统分为自动模式和手动模式,可通过按键开关进行切换。
三、硬件设计
- 光敏电阻模块:使用四个光敏电阻分别检测上、下、左、右四个方向的光线强度,将光信号转换为电信号。
- 电机驱动模块:直流电机用于调整太阳能板的俯仰角,步进电机用于调整太阳能板的方位角。通过PWM信号控制电机的转速和方向。
- LCD1602显示模块:用于显示当前光线强度、工作模式及控制状态等信息。
- 按键开关模块:包括一个模式切换键(K1)和四个方向控制键(K2-K5),用于手动控制太阳能板的转动。
四、软件设计
- 初始化:系统上电后,首先进行初始化操作,包括设置IO口、定时器、中断等。
- 光线检测:通过ADC模块读取光敏电阻的值,计算得到四个方向的光线强度。
- 自动模式:在自动模式下,系统根据光线强度自动调整太阳能板的角度。当上光线值比下光线值高于阈值时,直流电机工作上升;当下光线值比上光线值高于阈值时,直流电机工作下降;当左光线值比右光线值高于阈值时,步进电机工作左转;当右光线值比左光线值高于阈值时,步进电机工作右转。同时,系统通过LCD1602显示当前光线强度和工作状态。
- 手动模式:在手动模式下,用户可通过按键开关对太阳能板进行上下左右方向的控制。系统根据按键输入控制电机的转动,并在LCD1602上显示当前控制状态。
- 夜晚检测:通过光敏电阻检测环境光线强度,当光线强度低于一定阈值时,判断为夜晚,系统停止工作。
五、实验与测试
在实验阶段,对系统进行了多次测试,包括自动模式和手动模式的测试。测试结果表明,系统能够准确地检测光线强度,并根据光线强度自动或手动调整太阳能板的角度,实现了太阳能的高效收集。
六、结论
本文设计了一个基于STM32单片机的太阳能追光系统,通过光敏电阻检测光线强度,利用电机驱动太阳能板转动,实现了太阳能的高效收集。系统具有自动模式和手动模式两种工作模式,可通过按键开关进行切换。实验结果表明,系统性能稳定可靠,具有一定的实用价值。
//系统数据显示
void sys_data_show(void)
{
while(1)
{
//光线显示
lcd1602_show_nums(2,0,sys_ctrl.light[0],2,0);//上
lcd1602_show_nums(8,0,sys_ctrl.light[1],2,0);//下
lcd1602_show_nums(2,1,sys_ctrl.light[2],2,0);//左
lcd1602_show_nums(8,1,sys_ctrl.light[3],2,0);//右
break;
}
}
//系统功能控制
void sys_fun_ctrl(void)
{
//手动模式下
if(sys_ctrl.auto_flag==1)
{
switch(sys_ctrl.udrun)
{
case 0: _dc_motor_stop();break;//停止
//左比右亮,左转
if(sys_ctrl.light[2]>sys_ctrl.light[3]+LIGHT_VALUE)
{
sys_ctrl.lrrun=1;
step_motor_28BYJ48_send_pulse(8,0,STEPMOTOR_MAXSPEED,1,1);
}
//右比左亮,右转
else if(sys_ctrl.light[3]>sys_ctrl.light[2]+LIGHT_VALUE)
{
sys_ctrl.lrrun=2;
step_motor_28BYJ48_send_pulse(8,1,STEPMOTOR_MAXSPEED,1,1);
}
else
{
sys_ctrl.lrrun=0;
}
}
//如果是夜晚,系统不工作
else if(sys_ctrl.light[0]<LIGHT_N_MIN && sys_ctrl.light[1]<LIGHT_N_MIN &&
sys_ctrl.light[2]<LIGHT_N_MIN && sys_ctrl.light[3]<LIGHT_N_MIN)
{
sys_ctrl.udrun=0;
sys_ctrl.lrrun=0;
_dc_motor_stop();
}
}
}
//应用控制系统
void appdemo_show(void)
{
sys_parm_init();//系统参数初始化
KEY_Init();
pcf8591_init();
dc_motor_init();
step_motor_gpio_init();
lcd1602_init();//LCD1602初始化
sys_open_show();//系统初始界面显示
while(1)
{
sys_data_get();//系统数据获取
sys_data_show();//系统数据显示
sys_data_set();//系统数据设置
sys_fun_ctrl();//系统功能控制
}
}


















 1364
1364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











