







一、单变量的傅里叶变换(DFT)
1.1DFT及其反变换IDFT

其中
W
N
=
e
−
j
2
π
N
W_{N}=e^{-j\frac{2\pi }{N}}
WN=e−jN2π。
1.2DFT的重要性质
1.2.1奇偶对称性

1.2.2虚实特性

1.2.3复序列性质

1.3采样定理
1.3.1不失真采样条件

1.3.2采样的恢复

可以分析出,DFT点数越多,则用它恢复模拟频谱就会越精确。通过以下两种方法可以增加DFT点数N。
(1)提高采样频率
f
s
f_{s}
fs。
(2)增大序列长度(充0)。
二、两个变量的函数的扩展
2.1二维连续傅里叶变换对
傅里叶变换:
F
(
u
,
v
)
=
∫
−
∝
+
∝
∫
−
∝
+
∝
f
(
t
,
z
)
e
−
j
2
π
(
u
t
+
v
z
)
d
t
d
z
F(u,v)=\int_{-\propto }^{+\propto }\int_{-\propto }^{+\propto }f(t,z)e^{-j2\pi (ut+vz)}dtdz
F(u,v)=∫−∝+∝∫−∝+∝f(t,z)e−j2π(ut+vz)dtdz
傅里叶反变换:
f
(
t
,
z
)
=
∫
−
∝
+
∝
∫
−
∝
+
∝
F
(
u
,
v
)
e
j
2
π
(
u
t
+
v
z
)
d
u
d
v
f(t,z)=\int_{-\propto }^{+\propto }\int_{-\propto }^{+\propto }F(u,v)e^{j2\pi (ut+vz)}dudv
f(t,z)=∫−∝+∝∫−∝+∝F(u,v)ej2π(ut+vz)dudv
2.2二维傅里叶变换的性质
2.2.1平移与旋转
f
(
x
,
y
)
e
j
2
π
(
u
0
x
/
M
=
v
0
y
/
N
)
⇔
F
(
u
−
u
0
,
v
−
v
0
)
f(x,y)e^{j2\pi (u_{0}x/M=v_{0}y/N)}\Leftrightarrow F(u-u_{0},v-v_{0})
f(x,y)ej2π(u0x/M=v0y/N)⇔F(u−u0,v−v0)
f
(
x
−
x
0
,
y
−
y
0
)
⇔
F
(
u
,
v
)
e
−
j
2
π
(
x
0
u
/
M
+
y
0
v
/
N
)
f(x-x_{0},y-y_{0})\Leftrightarrow F(u,v)e^{-j2\pi (x_{0}u/M+y_{0}v/N)}
f(x−x0,y−y0)⇔F(u,v)e−j2π(x0u/M+y0v/N)
2.2.2周期性
F
(
u
,
v
)
=
F
(
u
+
k
1
M
,
v
)
=
F
(
u
,
v
+
k
2
N
)
=
F
(
u
+
k
1
M
,
v
+
k
2
N
)
F(u,v)=F(u+k_{1}M,v)=F(u,v+k_{2}N)=F(u+k_{1}M,v+k_{2}N)
F(u,v)=F(u+k1M,v)=F(u,v+k2N)=F(u+k1M,v+k2N)
f
(
x
,
y
)
=
f
(
x
+
k
1
M
,
y
)
=
f
(
x
,
y
+
k
2
N
)
=
f
(
x
+
k
1
M
,
y
+
k
2
N
)
f(x,y)=f(x+k_{1}M,y)=f(x,y+k_{2}N)=f(x+k_{1}M,y+k_{2}N)
f(x,y)=f(x+k1M,y)=f(x,y+k2N)=f(x+k1M,y+k2N)
2.2.3对称性
偶数部分:
W
e
(
x
,
y
)
=
w
(
x
,
y
)
+
w
(
−
x
,
−
y
)
2
W_{e}(x,y)=\frac{w(x,y)+w(-x,-y)}{2}
We(x,y)=2w(x,y)+w(−x,−y)
奇数部分:
W
o
(
x
,
y
)
=
w
(
x
,
y
)
−
w
(
−
x
,
−
y
)
2
W_{o}(x,y)=\frac{w(x,y)-w(-x,-y)}{2}
Wo(x,y)=2w(x,y)−w(−x,−y)
2.3Python实现傅里叶变换
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('demo.jpg', 0)
rows, cols = img.shape
print(rows, cols)
# 计算DFT效率最佳的尺寸
nrows = cv2.getOptimalDFTSize(rows)
ncols = cv2.getOptimalDFTSize(cols)
print(nrows, ncols)
nimg = np.zeros((nrows, ncols))
nimg[:rows, :cols] = img
img = nimg
# OpenCV计算快速傅里叶变换,输入图像应首先转换为np.float32,然后使用函数cv2.dft()和cv2.idft()。
dft = cv2.dft(np.float32(img), flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
magnitude_spectrum = 20 * np.log(cv2.magnitude(dft_shift[:, :, 0], dft_shift[:, :, 1]))
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(magnitude_spectrum, cmap='gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()
rows, cols = img.shape
crow, ccol = rows // 2, cols // 2
# 首先创建一个mask,中心正方形为1,其他均为0
mask = np.zeros((rows, cols, 2), np.uint8)
mask[crow - 30:crow + 30, ccol - 30:ccol + 30] = 1
# 应用掩码Mask和求IDTF
fshift = dft_shift * mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:, :, 0], img_back[:, :, 1])
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(img_back, cmap='gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()
三、 频率域滤波基础
3.1频率域的滤波
和F的相乘在逐元素的基础上定义,即H的 第一个元素乘以F的第一个元素,H的第二个元素乘以F的第二个元素。一般,F的元素为复数,H的元素为实数。H为零相移滤波器,因为滤波器不改变变换的相位,F中实部和虚部的乘数(H)可以抵消相角 ϕ ( u , v ) = a r c t a n I ( u , v ) R ( u , v ) \phi (u,v)=arctan\frac{I(u,v)}{R(u,v)} ϕ(u,v)=arctanR(u,v)I(u,v)。
3.2频率域的滤波步骤
(1)用
(
−
1
)
x
+
y
(-1)^{x+y}
(−1)x+y乘以输入图像进行中心变换
f
(
x
,
y
)
(
−
1
)
x
+
y
⇔
F
(
u
−
M
/
2
,
v
−
N
/
2
)
f(x,y)(-1)^{^{x+y}}\Leftrightarrow F(u-M/2,v-N/2)
f(x,y)(−1)x+y⇔F(u−M/2,v−N/2);
(2)计算(1)中的DFT F(u,v);
(3)用滤波器函数H(u,v)乘以F(u,v);
(4)计算(3)中结果的IDFT;
(5)得到4中结果的实部;
(6)用
(
−
1
)
x
+
y
(-1)^{x+y}
(−1)x+y乘以(5)中的结果,取消输入图像的乘数。
3.3空间和频率域滤波间的对应
空间域和频率域滤波间的纽带是卷积定理。
h
(
x
,
y
)
⇔
H
(
u
,
v
)
h(x,y)\Leftrightarrow H(u,v)
h(x,y)⇔H(u,v),
h
(
x
,
y
)
h(x,y)
h(x,y)是一个空间滤波器,
H
(
u
,
v
)
H(u,v)
H(u,v)称为的脉冲响应。
公式表明,空间域和频率域中的滤波器组成了傅 里叶变换对。给出在频率域的滤波器,可以通过反傅里叶变换得到 在空间域对应的滤波器,反之亦然。滤波在频率域中更为直观,但在空间域一般使用更小 的滤波器模板。可以在频率域指定滤波器,做反变换,然后在空间域 使用结果滤波器作为在空间域构建小滤波器模板的指导。对应关系如下图所示。
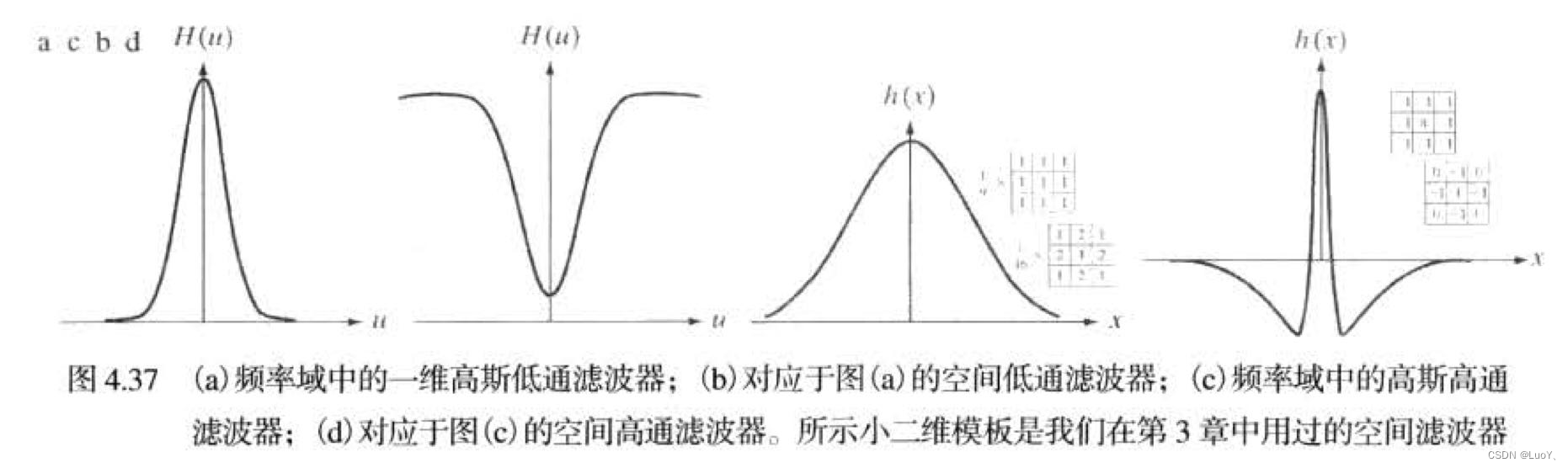
结论:
(1)低通滤波器: 当H(u)有很宽的轮廓时(大的
σ
\sigma
σ值),h(x)有 很窄的轮廓,反之亦然。当接近无限时, H(u)趋于常量函数,而h(x)趋于冲激函数。两个低通滤波器的相似之处在于两个域中的 值均为正。所以,在空间域使用带正系数的模板可以实现低通滤波。频率域低通滤波器越窄,滤除的低频成分就越多,使得图像就越模糊;在空间域,这意味着低通滤波器就越宽,模板就越大。
(2)高通滤波器:空间域滤波器有正值和负值,一旦值变为负数,就再也不会变为正数。为什么频率域中的内容在空间域要使用小空间模板。频率域可以凭直观指定滤波器,空间域滤波效果取决于空间模板的大小。
四、使用频率域滤波器平滑图像
4.1理想低通滤波器
截断傅里叶变换中的所有高频成分,这些高 频成分处于指定距离之外
H
(
u
,
v
)
=
{
1
D
(
u
,
v
)
≤
D
0
0
D
(
u
,
v
)
>
D
0
H(u,v)=\left\{\begin{matrix} 1 & D(u,v)\leq D_{0}& \\ 0& D(u,v)> D_{0} & \end{matrix}\right.
H(u,v)={10D(u,v)≤D0D(u,v)>D0
频率矩形的中心在(u,v)=(M/2,N/2),从点(u,v)到中心的距离如下:
D
(
u
,
v
)
=
[
(
u
−
P
/
2
)
2
+
(
v
−
Q
/
2
)
2
]
1
/
2
D(u,v)=[(u-P/2)^{2}+(v-Q/2)^{2}]^{1/2}
D(u,v)=[(u−P/2)2+(v−Q/2)2]1/2
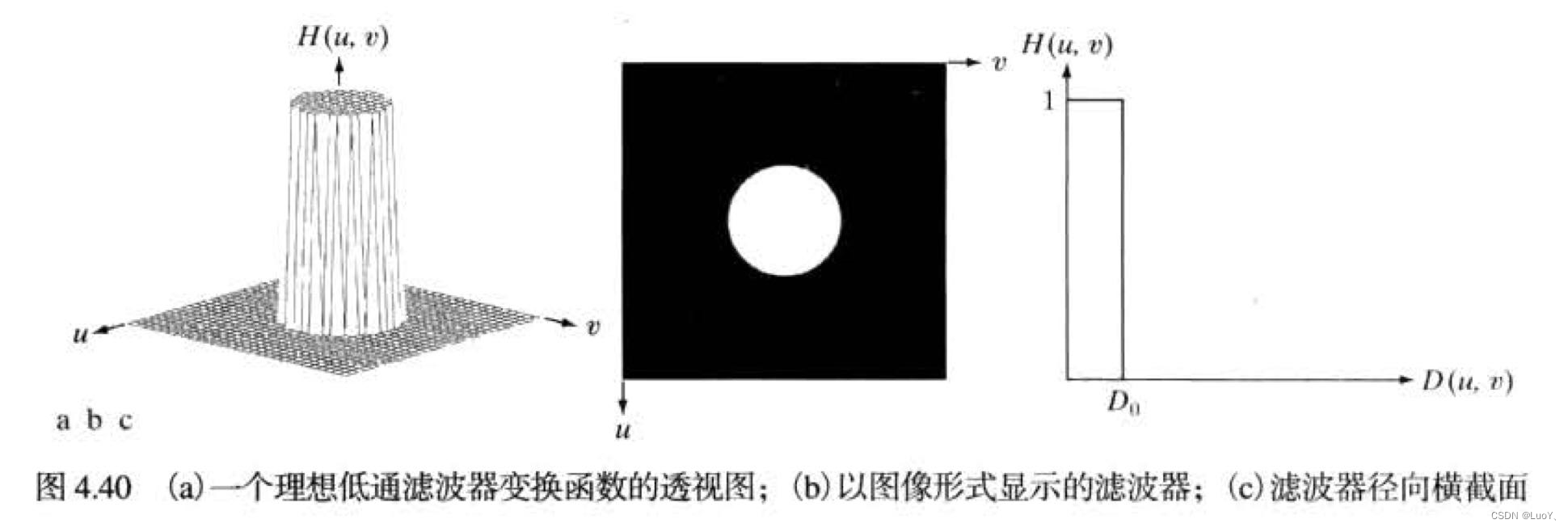
上图说明在半径为的圆内,所有频率没有衰减地通过滤波器,而在此半径的圆之外的所有频率完全被衰减掉。
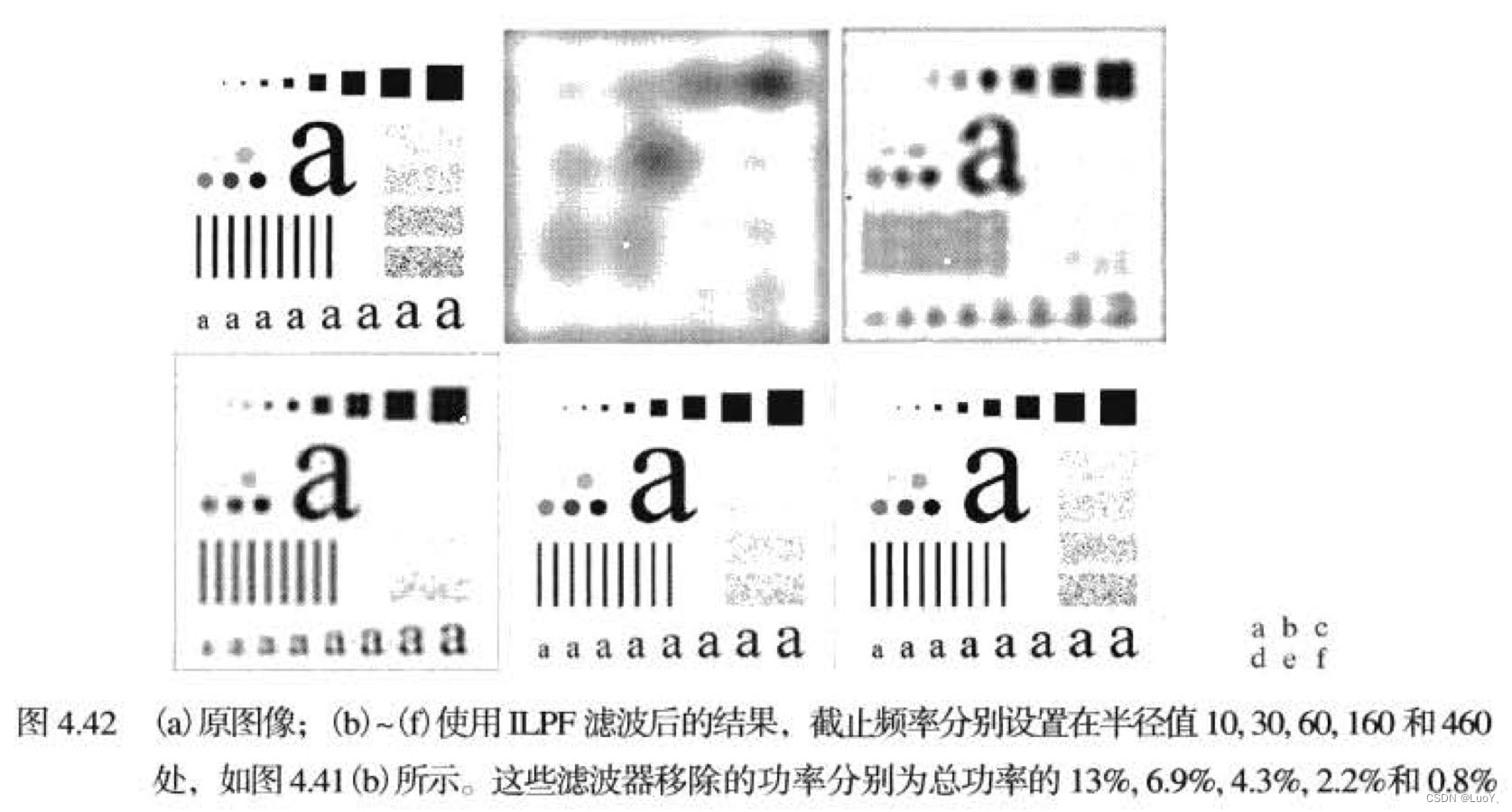
理想低通滤波器距离——具有振铃现象,如下图所示。
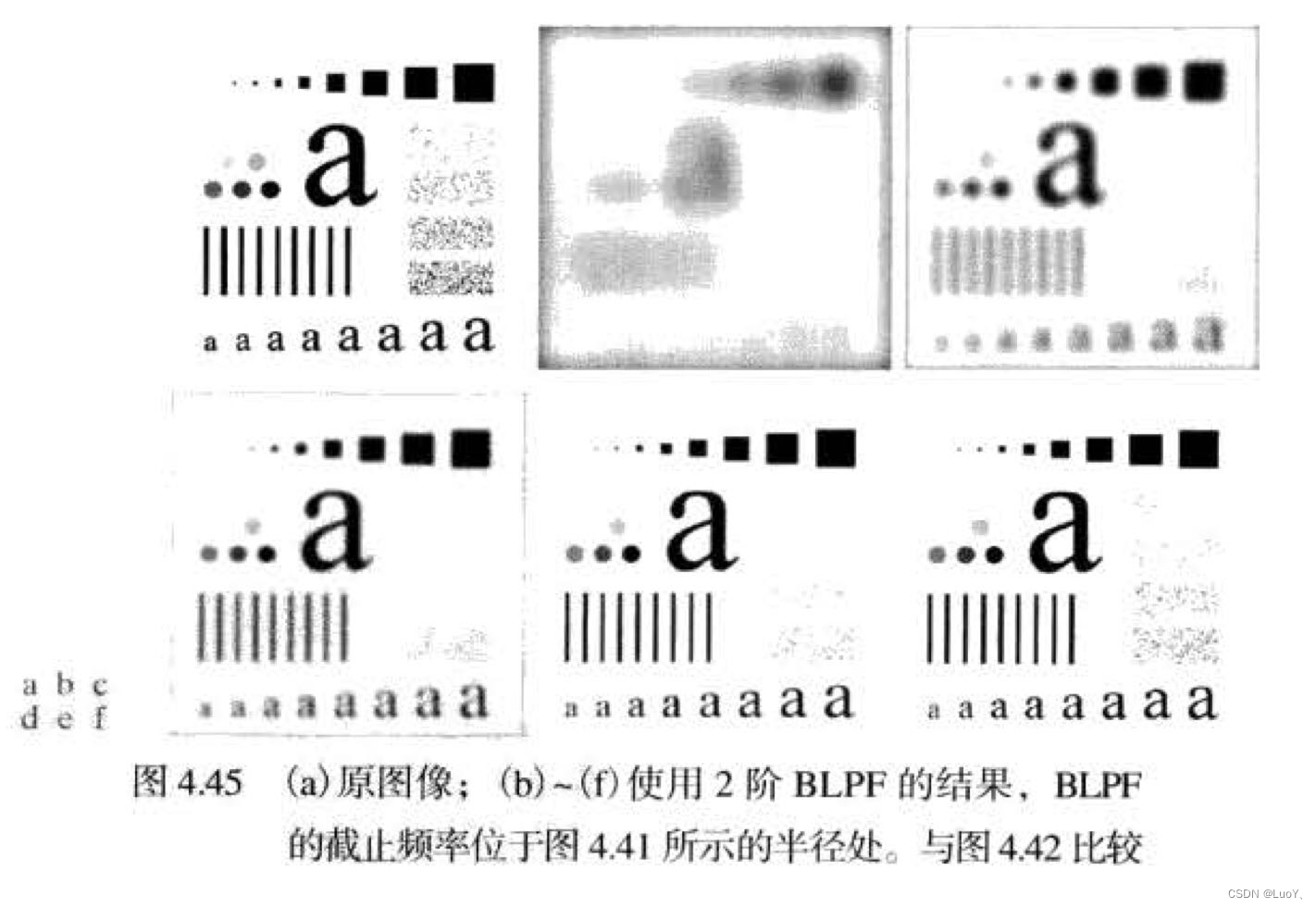
4.2布特沃斯低通滤波器
n级巴特沃斯低通滤波器(BLPF)定义如下:
H
(
u
,
v
)
=
1
1
+
[
D
(
u
,
v
)
/
D
0
]
2
n
H(u,v)=\frac{1}{1+[D(u,v)/D_{0}]^{2n}}
H(u,v)=1+[D(u,v)/D0]2n1
D
0
D_{_{0}}
D0为截至频率距原点的距离,D(u,v)是点(u,v)距原点的距离。不同于ILPF,BLPF变换函数在通带与被滤除的频率之间没有明显的截断.当D(u,v)=D0时,H(u,v)=0.5(最大值是1,当 D(u,v)=0)
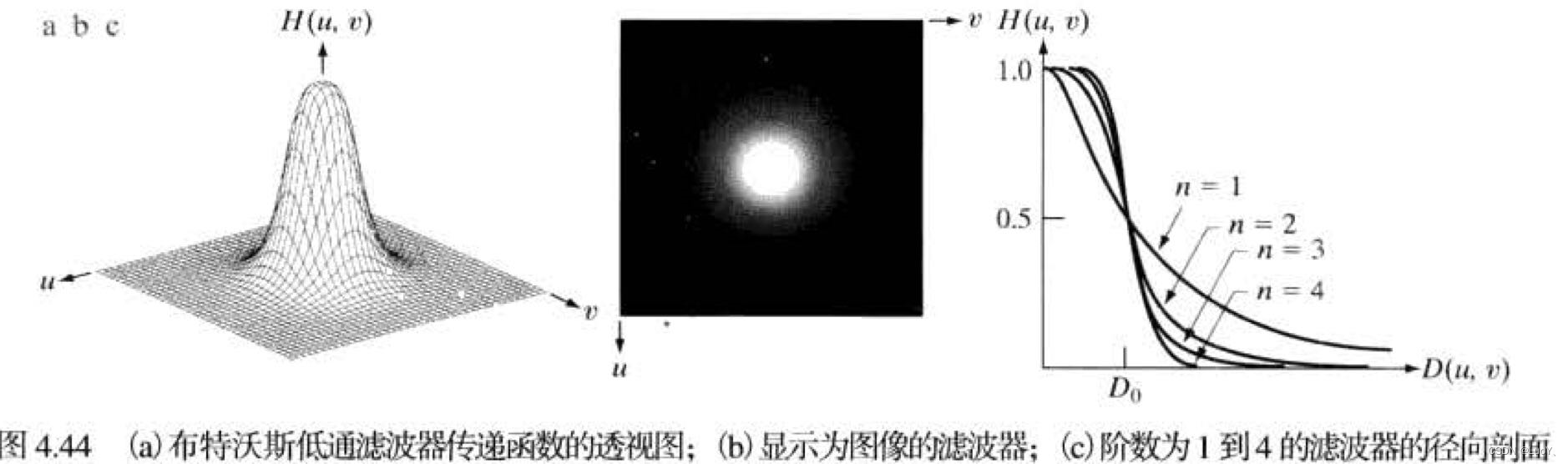
进行平滑以改进图像质量。通常,BLPF的平滑效果好于ILPF(振铃现象)。
布特沃斯低通滤波器n=2时的结果如下图。
4.3高斯低通滤波器
二维高斯低通滤波器(GLPF)定义如下:
H
(
u
,
v
)
=
e
−
D
2
(
u
,
v
)
/
2
σ
2
H(u,v)=e^{-D^{2}(u,v)/2\sigma^{2}}
H(u,v)=e−D2(u,v)/2σ2,D(u,v)是点(u,v)距原点的距离,使
σ
=
D
0
\sigma=D_{_{0}}
σ=D0。
H
(
u
,
v
)
=
e
−
D
2
(
u
,
v
)
/
2
D
0
2
H(u,v)=e^{-D^{2}(u,v)/2D_{0}^{2}}
H(u,v)=e−D2(u,v)/2D02,当D(u,v)=时,滤波器下降到它最大值的0.607处。
使用高斯低通滤波器平滑图像结果如下图所示:
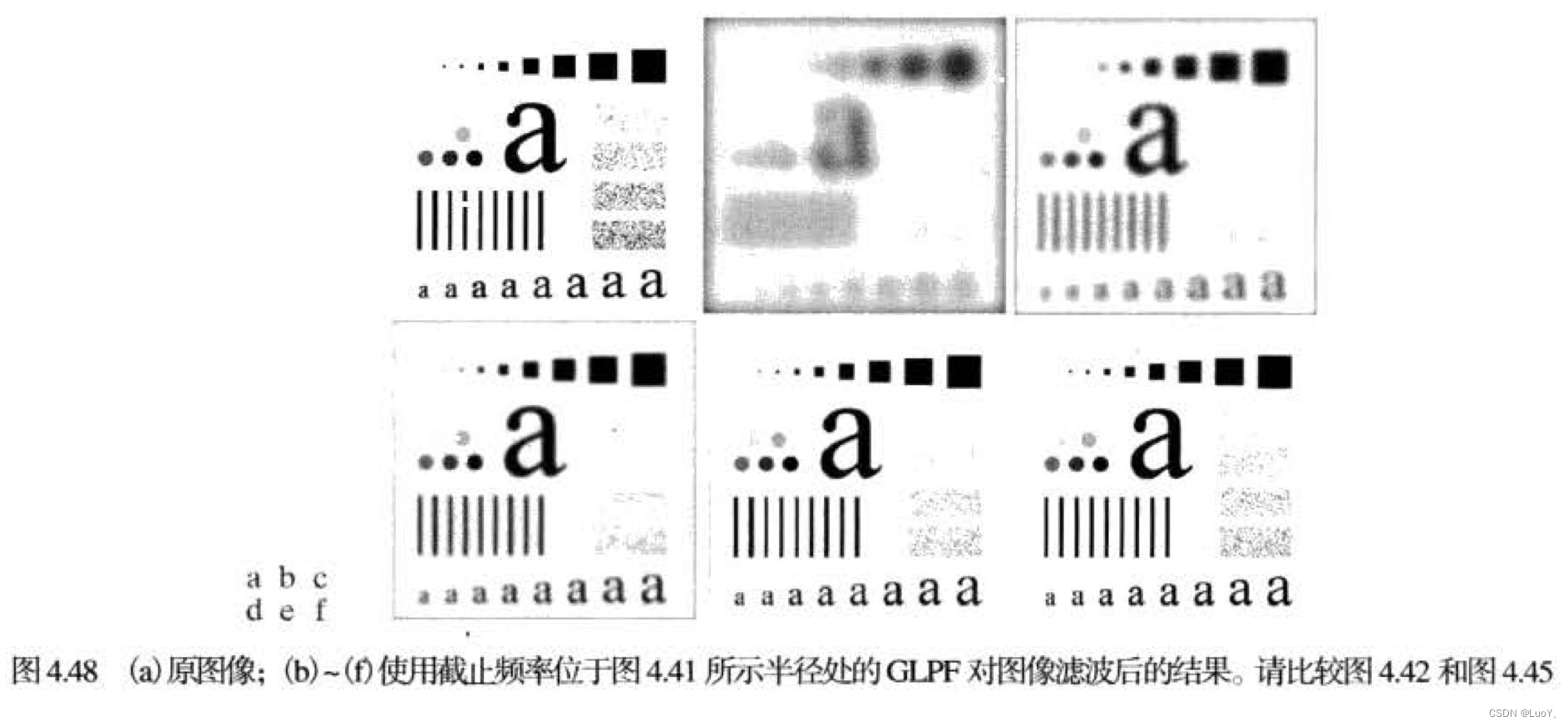
结论:GLPF不能达到有相同截止频率的二阶 BLPF的平滑效果,GLPF没有振铃。如果需要严格控制低频和高频之间截至频率的过渡,选用BLPF,代价是可能 产生振铃。
五、使用频率域滤波器锐化图像
5.1理想高通滤波器
截断傅里叶变换中的所有低频成分,这些低 频成分处于指定距离
D
0
D_{0}
D0之内,
H
(
u
,
v
)
=
{
0
D
(
u
,
v
)
≤
D
0
1
D
(
u
,
v
)
>
D
0
H(u,v)=\left\{\begin{matrix} 0 & D(u,v)\leq D_{0}& \\ 1& D(u,v)> D_{0} & \end{matrix}\right.
H(u,v)={01D(u,v)≤D0D(u,v)>D0
频率矩形的中心在(u,v)=(M/2,N/2),从点 (u,v)到中心(原点)的距离如下:
D
(
u
,
v
)
=
[
(
u
−
M
/
2
)
2
+
(
v
−
N
/
2
)
2
]
1
/
2
D(u,v)=[(u-M/2)^{2}+(v-N/2)^{2}]^{1/2}
D(u,v)=[(u−M/2)2+(v−N/2)2]1/2
使用IHPF对图像滤波后的结果如下图:
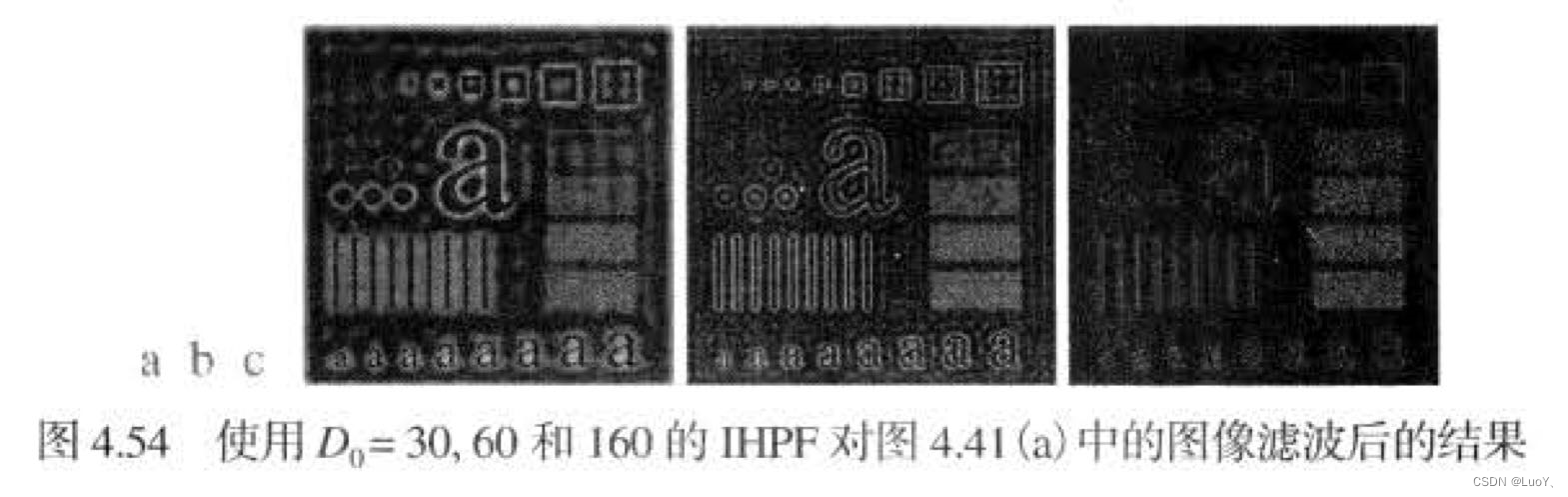
结论:图a和图b的振铃问题十分明显。
5.2布特沃斯高通滤波器
n阶且截至频率距原点的距离为
D
0
D_{0}
D0的巴特沃 思高通滤波器(BHPF)定义为:
H
(
u
,
v
)
=
1
1
+
[
D
0
/
D
(
u
,
v
)
]
2
n
H(u,v)=\frac{1}{1+[D_{0}/D(u,v)]^{2n}}
H(u,v)=1+[D0/D(u,v)]2n1
二阶布特沃斯高通滤波器对图像滤波的结果如下图所示:
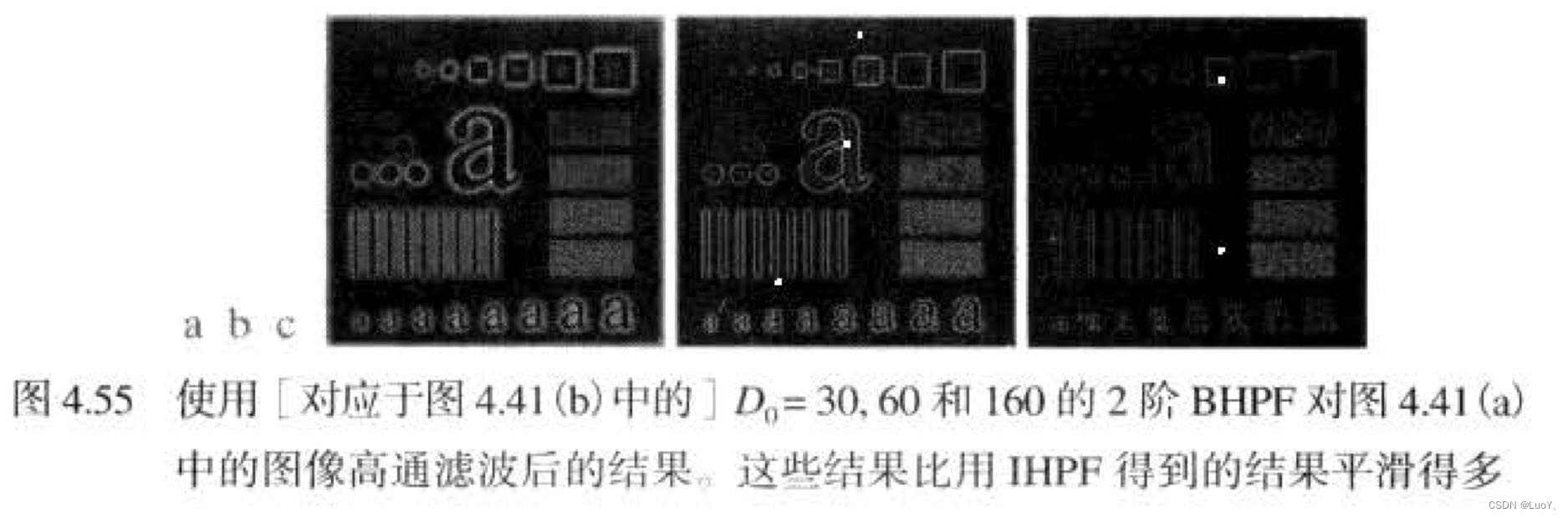
结论:BHPF的结果比IHPF的结果平滑得多。
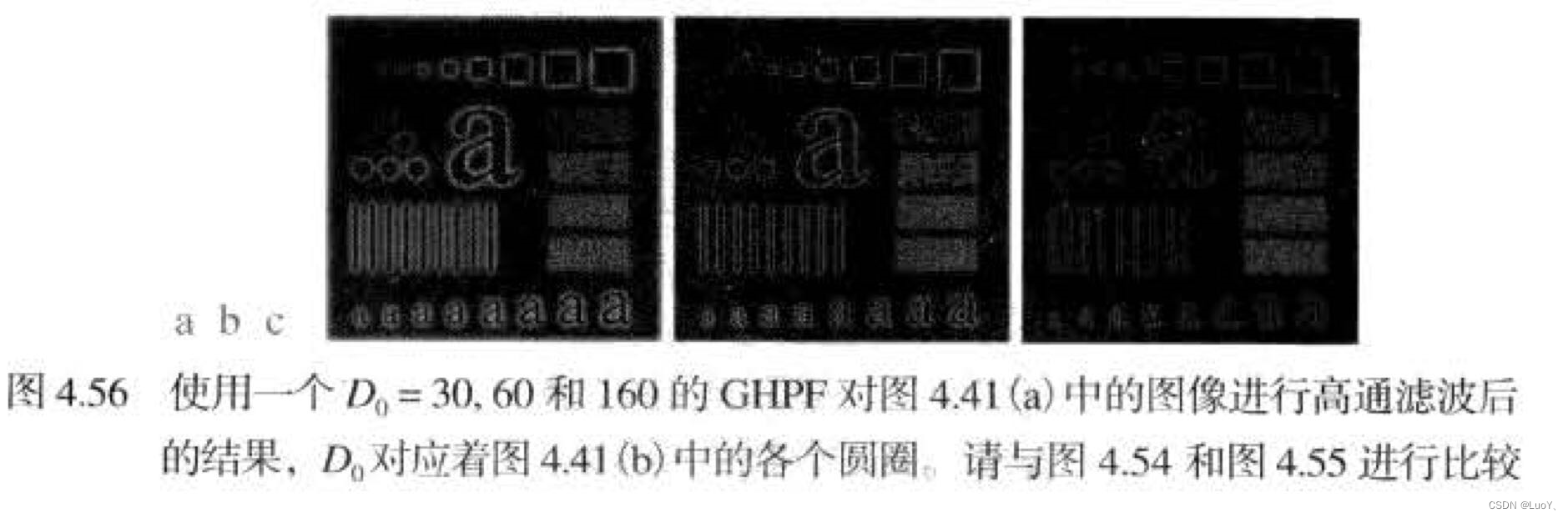
5.3高斯高通滤波器
截频距原点为
D
0
D_{0}
D0的高斯高通滤波器(GHPF)定义为:
H
(
u
,
v
)
=
1
−
e
−
D
2
(
u
,
v
)
/
2
D
0
2
H(u,v)=1-e^{-D^{2}(u,v)/2D_{0}^{2}}
H(u,v)=1−e−D2(u,v)/2D02
D
(
u
,
v
)
=
[
(
u
−
M
/
2
)
2
+
(
v
−
N
/
2
)
2
]
1
/
2
D(u,v)=[(u-M/2)^{2}+(v-N/2)^{2}]^{1/2}
D(u,v)=[(u−M/2)2+(v−N/2)2]1/2
高斯高通滤波器对图像滤波的结果如下图所示:
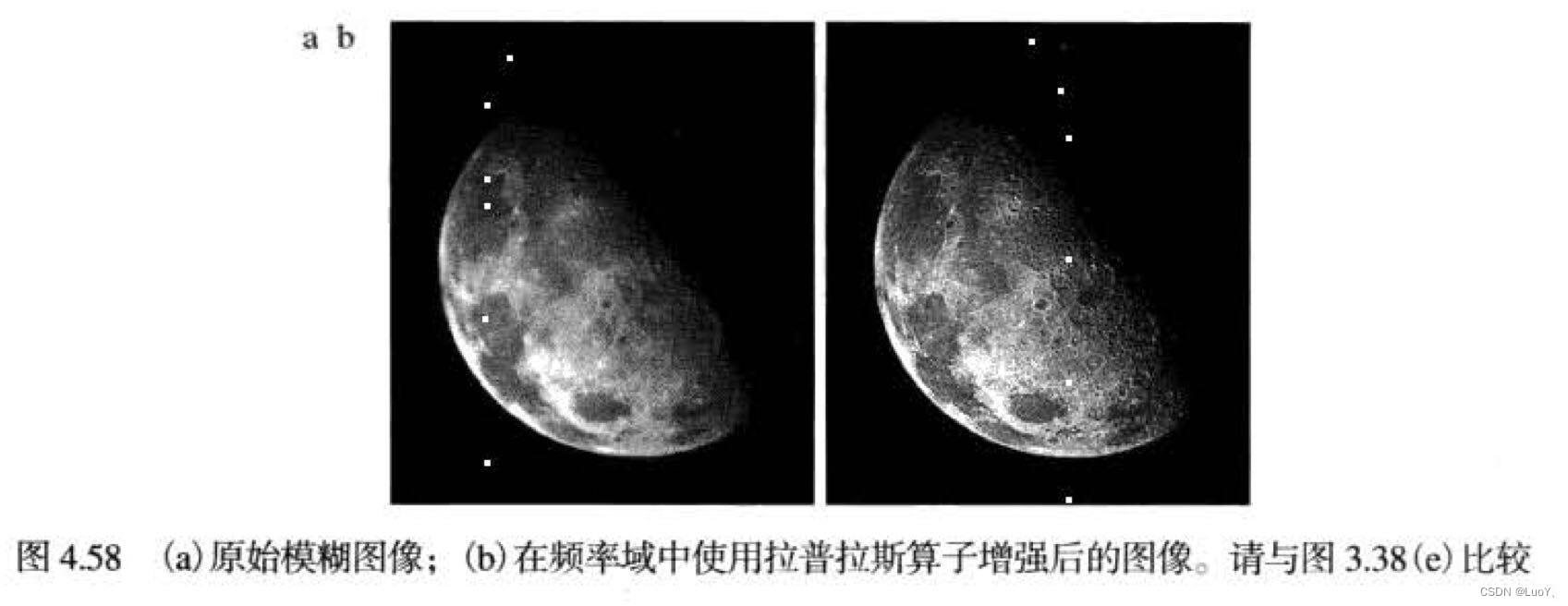
5.4频率域的拉普拉斯算子
原点从(0,0)移到(M/2,N/2),所以,滤波函数平移为
H
(
u
,
v
)
=
−
[
(
u
−
M
/
2
)
2
+
(
v
−
N
/
2
)
2
]
H(u,v)=-[(u-M/2)^{2}+(v-N/2)^{2}]
H(u,v)=−[(u−M/2)2+(v−N/2)2],空间域拉普拉斯算子过滤后的图像可由计算 H(u,v)F(u,v)的反傅里叶变换得到
▽
2
f
(
x
,
y
)
=
ℑ
−
1
{
−
[
(
u
−
M
/
2
)
2
+
(
v
−
N
/
2
)
2
]
F
(
u
,
v
)
}
\triangledown ^{2}f(x,y)=\Im ^{-1}\left \{ -[(u-M/2)^{2}+(v-N/2)^{2}]F(u,v) \right \}
▽2f(x,y)=ℑ−1{−[(u−M/2)2+(v−N/2)2]F(u,v)}。
使用拉普拉斯算子在频率域锐化图像的结果如下图所示:
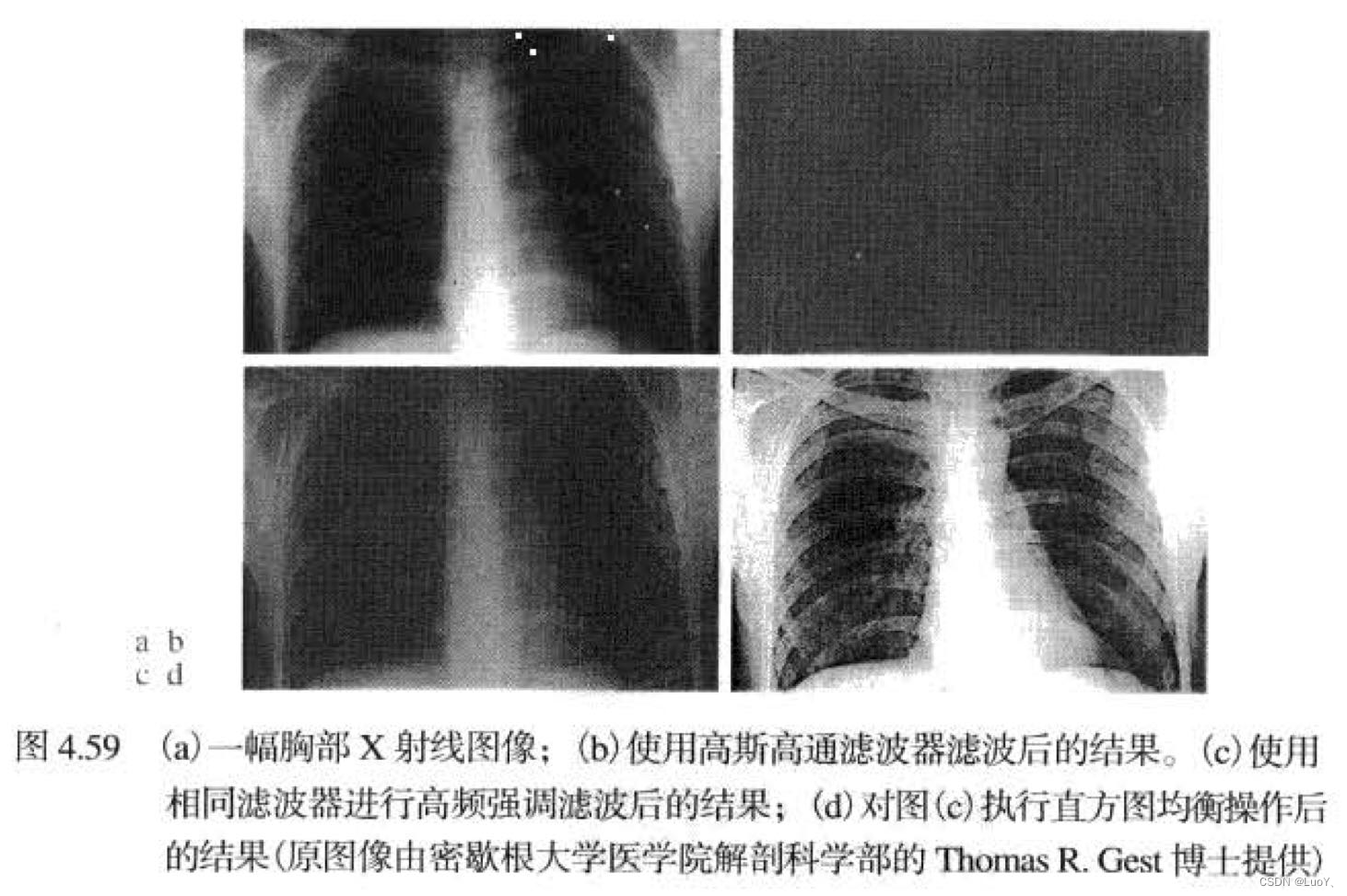
5.5钝化模板、高频提升滤波和高频加强滤波
钝化模板(锐化或高通图像):从一幅图像减去 其自身模糊图像而生成的锐化图像构成。在频率 域,即从图像本身减去低通滤波(模糊)后的图 像而得到高通滤波(锐化)的图像:
f
h
p
(
x
,
y
)
=
f
(
x
,
y
)
−
f
l
p
(
x
,
y
)
f_{hp}(x,y)=f(x,y)-f_{lp}(x,y)
fhp(x,y)=f(x,y)−flp(x,y)。
高频提升过滤:
f
h
p
(
x
,
y
)
=
A
f
(
x
,
y
)
−
f
l
p
(
x
,
y
)
f_{hp}(x,y)=Af(x,y)-f_{lp}(x,y)
fhp(x,y)=Af(x,y)−flp(x,y),当A=1,即高通过滤;当A>1,累加图像本身。由
H
h
p
(
u
,
v
)
=
1
−
H
l
p
(
u
,
v
)
H_{hp}(u,v)=1-H_{lp}(u,v)
Hhp(u,v)=1−Hlp(u,v),高频提升过滤可以定义为
H
h
p
(
u
,
v
)
=
(
A
−
1
)
+
H
h
p
(
u
,
v
)
H_{hp}(u,v)=(A-1)+H_{hp}(u,v)
Hhp(u,v)=(A−1)+Hhp(u,v)。
高频提升加强:
H
h
p
(
u
,
v
)
=
a
+
b
H
l
p
(
u
,
v
)
H_{hp}(u,v)=a+bH_{lp}(u,v)
Hhp(u,v)=a+bHlp(u,v),
a
≥
0
a\geq 0
a≥0,
b
>
a
b> a
b>a。用图像的高频成分进行增强,增加a的目的是使零频率不被滤波器过滤。当a=A-1,b=1时转化为高频提升过滤;当b>1,高频得到加强。
高频提升加强示例如下图所示:
六、总结
频率就是变化的快慢,傅里叶变换把图像从空域变换到频域。在频域中,高频分量表示图像灰度变换比较快的地方,比如物体的边缘。而物体内部比较平坦的区域,灰度基本没有变化或变化较小,对应的就是低平分量。
由于图像中的噪声主要集中在图像的高频部分,为了去除噪声,改善图像质量,可以采用低通滤波器来抑制高频部分,然后再进行傅里叶反变换获得滤波图像,可以达到图像平滑的目的,常用的频率域低通滤波器有理想低通滤波器、布特沃斯低通滤波器和高斯低通滤波器。这三种滤波器中理想滤波器平滑效果最好,但是高斯滤波器中没有振铃现象。通过对低通滤波器的反操作,可以得到高通滤波器。
通过本章的学习,巩固了傅里叶变换的知识,同时也开始尝试使用Python去实现这些算法,理解有些不熟练,还是得多实践。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









