






巡线小车红巡线原理采用了红外线探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。红外探测器探测距离有限,一般最大不应超过3cm。
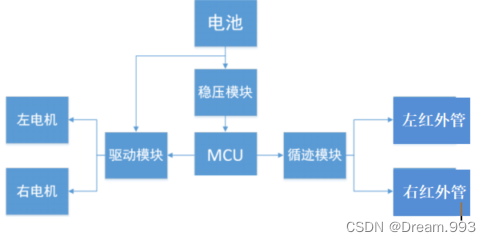
该系统主要有单片机、稳压、循迹和驱动四个模块组成,系统整体框架如下图。
经过反复考虑论证,为满足要求“H”场地,分析后的出,小车需要进行直行,掉头,右转,停车以及直线修正这几个运动状态。
当循迹传感器照到黑线时输出点平0,照到白线时输出1。A,B,C,D四路。
四路巡线小车控制逻辑:
a、 A B C D状态为 1 1 1 1,小车直行
b、 A B C D状态为 0 0 1 1,或者1 0 1 1 ,小车右轮速度大于左轮
c、 A B C D状态为 1 1 0 0,或者1 1 0 1 ,小车左轮速度大于右轮
d、 A B C D状态为 0 0 0 0,小车掉头或在“T”字路口右转
e、 A B C D状态为 1 1 0 0,小车右转
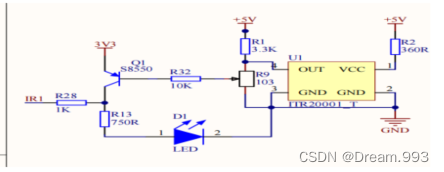
采用的是ITR20001/T,即反射式光电开关传感器,它的工作原理是红外传感器红外发射管发射出红外光,红外接收管根据反射回来的红外光强度大小来计数的,故被检测的工件或物体表面必须有黑白相间的部位用于吸收和反射红外光,这样红外接收管才能有效的截止和饱和达到计数的目的。所以在选择工作点、安装及使用中最关健的一点是红外接收管必须工作于截止区和饱和区。
当有反射光时候,产生高电平信号,通过外围电路,二极管二极管被电亮。
链接:https://pan.baidu.com/s/11mYTglbKbg9fgtMwai9HoA
提取码:1234
















 6252
6252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











