






一、什么是滑模
什么是滑模?这是一个值得思考的问题!
简单的来讲,滑模简单理解就是构造上述s(x1,x2,x3…)=0这样的一个超曲面,当超曲面s=0时,构成s的所有状态,也将为0。
举个经典滑模面的例子,S=c*e+de。其中,e是理想轨迹与实际轨迹的误差。那么c*e+de=0,这是一个经典的一阶线性齐次微分方程,解得,当t趋向正无穷的时候,e也趋于0,也就是说明了,我们理想轨迹与实际轨迹的误差为0 ,实现了我们实际轨迹跟踪到理想轨迹的控制目标。
那么好,说了这么多,咱到底怎么才能实现我们想法呢?
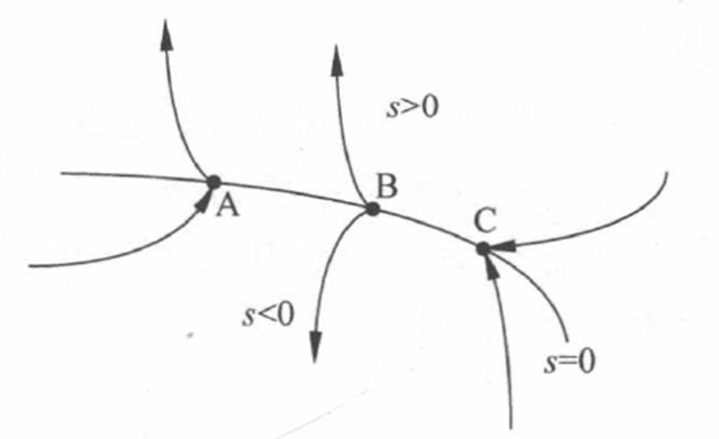
看上面的图,我们先稍微分析一下哈。
超曲面s(x1,x2,x3…)=0,将空间分为上下两部分(s>0及s<0)。我们称切换面s=0上所有的运动点都是终止点的区域为“滑动模态区”,或简称为"滑模"区。系统在滑模区中的运动就称为“滑模运动”。
你看,我们的目标是为了保持S=0一直成立,那么当S>0的时候,我们希望它“下来”,这个时候我们只需要让<0就可以,结合下高中物理知识,仔细想想,动一动大家聪明的小脑袋瓜子。那么当S<0的时候,我们希望它“上去”,这个时候我们只需要让
>0就可以。
将上面的抽象的汉语,换成简介的数学语言可以得到:
,
在简洁下
妙!多么美妙的公式!
这样,我们就可以保证S=0成立
(其实,真实情况是,在变量S在s=0这条分界线上,上下鬼畜横跳。。。。。)
二、控制率推导
由上次建模推导,我们得到两连杆的动力学建模如下所示公式:
定义跟踪误差为:
设计滑模面为:
对滑模面求导:
构造
进行求导
这里,我写在一起了,猛一看,我感觉对新手来说有点突兀。来,我们讲解下。
首先,求导完,我们需要将代入,我们将
分成三部分,
,分别是理想控制率,鲁棒项,和扰动观测器(扰动观测器本文不涉及哈,这里只是笔者的习惯)。
我们设计
是为了消去系统中的变量,简单来说,强制保持s=0,但是这玩意就像爱情一样,会乱跑,这时候我们加入
-鲁棒项,你想跑?没门!我强行给你保证你在S=0的位置。(强扭的瓜不甜,所以系统会产生抖动。)
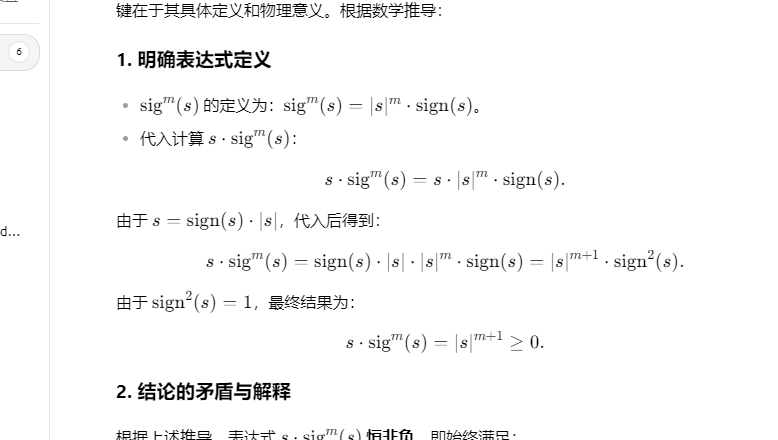
后续的一些证明,关于sig的定义等等
三、总结
优点:无视外部扰动和不确定参数,采用一种比较“暴力”的方式达到控制的目的。
研究方向:渐进时间稳定,有限时间稳定,固定时间稳定,预设时间稳定,事件触发等等 …..
建议大家自己手推导一遍,加强理解,纸上得来终觉浅,绝知此事要躬行!
谢谢大家的观看,希望大家学有所成,身体健康!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









