






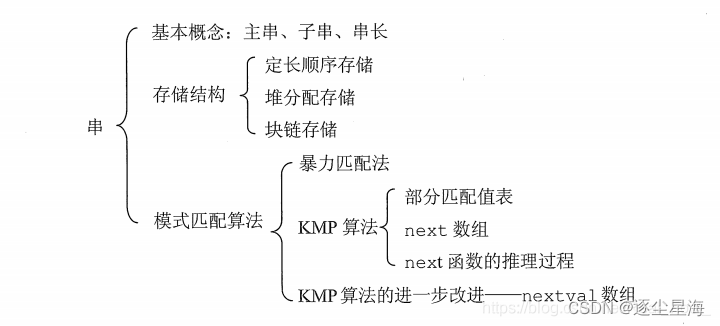
串
线性结构:线性表、栈和队列、串与数组和广义表
串的逻辑结构和线性表极为相似,区别仅在于串的数据对象限定为字符集。在基本操作上,串和线性表有很大差别。线性表的基本操作主要以单个元素作为操作对象,如查找、插入或删除某个元素等;而串的基本操作通常以子串(串的整体)作为操作对象,如查找、插入或删除一个子串等。
一、串的类型定义
串(String)----零个或多个字符组成的有限序列,数据元素是一个字符
【定义】由零个或多个字符组成的有限序列, 一般记为 s= "a1 a2 … an" (n≥O)
【串名】s就是串的名字。
【串值】由双引号括起来的字符序列就是串的值
【串长】串中字符的数目n即为串长
【空串】零个字符的串,其长度为零。注意空格串与空串的区别。
【子串】串中任意个连续的字符组成的子序列称为该串的子串。
-
子串个数:((n+1)*n/2)+1——+1为空串
-
e.g. software 的子串数量为 ((8+1)*8/2)+1 = 37
【主串】包含子串的串相应地称为主串。
【空格串】 由一个或多个空格组成的字符串。
抽象数据类型
ADT String {
数据对象: D={ ai | ai∈ CharacterSet,记为 V,i=1 ,2 ,…, n,n≥ 0 }
结构关系: R={< ai,ai + 1 >| ai,ai + 1 ∈ V,i=1 ,…, n-1 ; n-1 ≥ 0 }
基本操作:
( 1 ) StrAssign( &S,chars)
操作前提: chars 是字符串常量。
操作结果:生成一个值等于 chars 的串 S。
( 2 ) StrInsert( S,pos,T)
操作前提:串 S 存在,1 ≤ pos≤ StrLength( S)+ 1 。
操作结果:在串 S 的第 pos 个字符之前插入串 T。
( 3 ) StrDelete( &S,pos,len)
操作前提:串 S 存在,1 ≤ pos≤ StrLength( S)+ 1 。
操作结果:从串 S 中删除第 pos 个字符起长度为 len 的子串。
( 4 ) StrCopy( S,&T)
操作前提:串 S 存在。
操作结果:由串 S复制得串 T。
( 5 ) StrEmpty( S)
操作前提:串 S 存在。
操作结果:若串 S 为空串,则返回 TRUE,否则返回 FALSE。
( 6 ) StrCompare( S,T)
操作前提:串 S 和 T 存在。
操作结果:若 S>T,则返回值>0 ;如 S=T,则返回值=0 ;若 S<T,则返回值<0 。
( 7 ) StrLength( S)
操作前提:串 S 存在。
操作结果:返回串 S 的长度,即串 S 中的字符个数。
( 8 ) StrClear( &S)
操作前提:串 S 存在。
操作结果:将 S 清为空串。
( 9 ) StrCat( S,T)
操作前提:串 S 和 T 存在。
操作结果:将串 T 的值连接在串 S 的后面。
( 10 ) SubString( &Sub,S,pos,len)
操作前提:串 S 存在,1 ≤ pos≤ StrLength( S)且 1 ≤ len≤ StrLength( S)- pos+1
操作结果:用 Sub 返回串 S 的第 pos 个字符起长度为 len 的子串。
( 11 ) StrIndex( S,pos,T)
操作前提:串 S 和 T 存在,T 是非空串,1 ≤ pos≤ StrLength( S)。
操作结果:若串 S 中存在和串 T 相同的子串,则返回它在串 S 中第 pos 个字符 之后第一次出现的位置;否则返回 0 。
( 12 ) StrReplace( &S,T,V)
操作前提:串 S、 T 和 V 存在且 T 是非空串。
操作结果:用 V 替换串 S 中出现的所有与 T 相等的不重叠的子串。
( 13 ) StrDestroy( S)
操作前提:串 S 存在。
操作结果:销毁串 S。
}ADT string
int Index(Sring S, String T){
int i = 1, n = StrLength(S), m = StrLength(T);
String sub;
while(i <= n-m+1){
SubString(&sub, S, i, m); //取主串第i个位置,长度为m的串给sub
if(StrCompare(sub, T) != 0){
++i;
}else{
return i; //返回子串在主串中的位置
}
}
return 0; //S中不存在与T相等的子串
}二、存储结构
串也有顺序存储和链式存储两种存储方式,但大多采用顺序存储。
1.串的顺序存储
1)串的定长顺序存储结构:
为每个定义的串变量分配一个固定长度的存储区域。
特点: 静态的,编译时就确定了串的空间大小。
#define MAXLEN 255
typedef struct{
char ch[MAXLEN+1]; //若串非空,则按串长分配存储区,否则ch为NULL
int length; //串长度
}SString;2)串的堆式顺序存储结构:
在C语言中,存在一一个称之为“堆”的自由存储区,并用malloc()和free()函数来完成动则返回一个指向起始地址的指针,作为串的基地址,这个串由ch指针来指示;若分配失败,则返回NULL。已分配的空间可用free()释放掉。
typedef struct{
char *ch; //按串长分配存储区,ch指向串的基地址
int length; //串的长度
}HString;2.串的链式存储
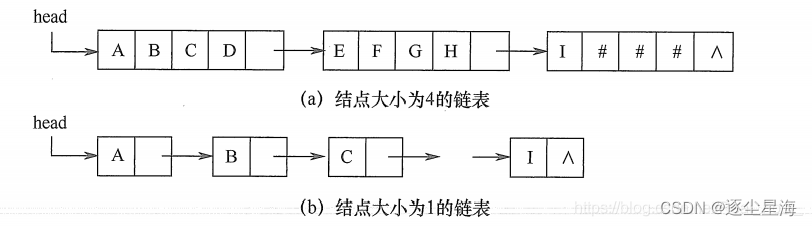
#define CHUNKSIZE 80 //可由用户定义的块大小
typedef struct Chunk{
char ch[CHUNKSIZE];
struct Chunk *next;
}Chunk;
typedef struct{
Chunk *head,*tail; //串的头指针和尾指针
int curlen; //串的当前长度
}LString;链式存储的操作方便,但是存储密度小。结点大小的选择直接影响着串处理的效率。
三、串的模式匹配
子串的定位运算通常称为串的模式匹配或串匹配。
算法目的:确定主串中所含子串第一次出现的位置(定位)
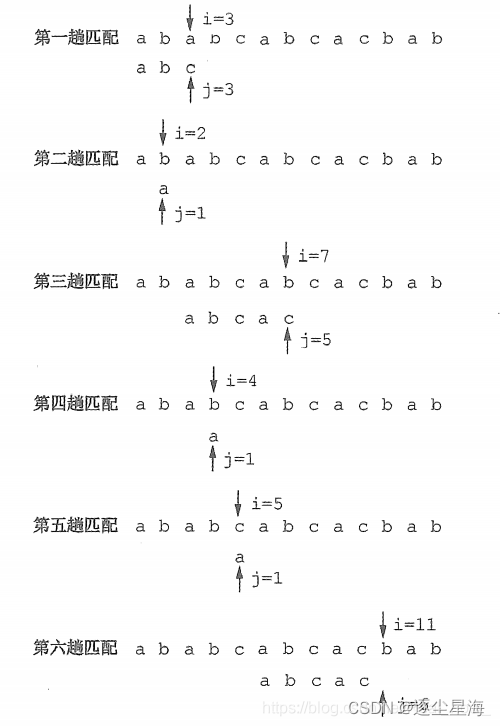
1.BF算法
子串的定位操作通常称为串的模式匹配,它求的是子串(常称模式串)在主串中的位置。这里采用定长顺序存储结构,给出一种不依赖于其他串操作的暴力匹配算法。
古典的,经典的,朴素的,穷举的
算法原理:
-
将主串的第pos个字符和模式的第一个字符比较,
-
若相等,继续逐个比较后续字符;
-
若不等,从主串的下一字符起,重新与模式的第一个字符比较。
-
-
直到主串的一个连续子串字符序列与模式相等 。返回值为S中与T匹配的子序列第一个字符的序号,即匹配成功。
-
否则匹配失败,返回值为 0
匹配示意图:
伪代码:
int Index_BF(SString S, SString T, int pos)
{
i=pos; j=1;
while(i<=S.length && j<=T.length){
if(S.ch[i]==T.ch[j]){
i++; j++
}else{
i=i-j+2; j=1;
}
}
if(j>T.length) return i-T.length; // 匹配成功
else return 0 // 匹配失败
}算法分析
简简单的模式匹配算法的最坏时间复杂度为O(nm),主串长度为n,子串长度为m。
-
总次数为:
(n-m)*m+m=(n-m+1)*m若m<<n,则算法复杂度O(n*m) -
最好情况下的时间复杂度为O(n+m)
-
最坏情况下的时间复杂度为O(nm)
-
因为在匹配失败后,主串的指针总要回溯到i-j+2的位置,所以时间复杂度高
2.KMP算法
kmp算法可以看作是对BF算法的改进
(配合下方这两个up的两个链接进行理解)
介绍:
改进:每趟匹配过程中出现字符比较不等时,不回溯主指针i,利用已得到的“部分匹配”结果将模式向右滑动尽可能远的一段距离,继续进行比较。
从分析模式本身的结构着手,如果已匹配相等的前缀序列中有某个后缀正好是模式的前缀,那么就可以将模式向后滑动到与这些相等字符对齐的位置,主串i指针无须回溯,并继续从该位置开始进行比较。而模式向后滑动位数的计算仅与模式本身的结构有关,与主串无关!!!
KMP算法的特点:仅仅后移模式串,比较指针不回溯。
(对处理从外设输入的庞大文件很有效,可以边读入边比较)
算法原理:
kmp算法的讲解可以看天道酬勤的视频:【「天勤公开课」KMP算法易懂版】「天勤公开课」KMP算法易懂版_哔哩哔哩_bilibili
算法步骤:
-
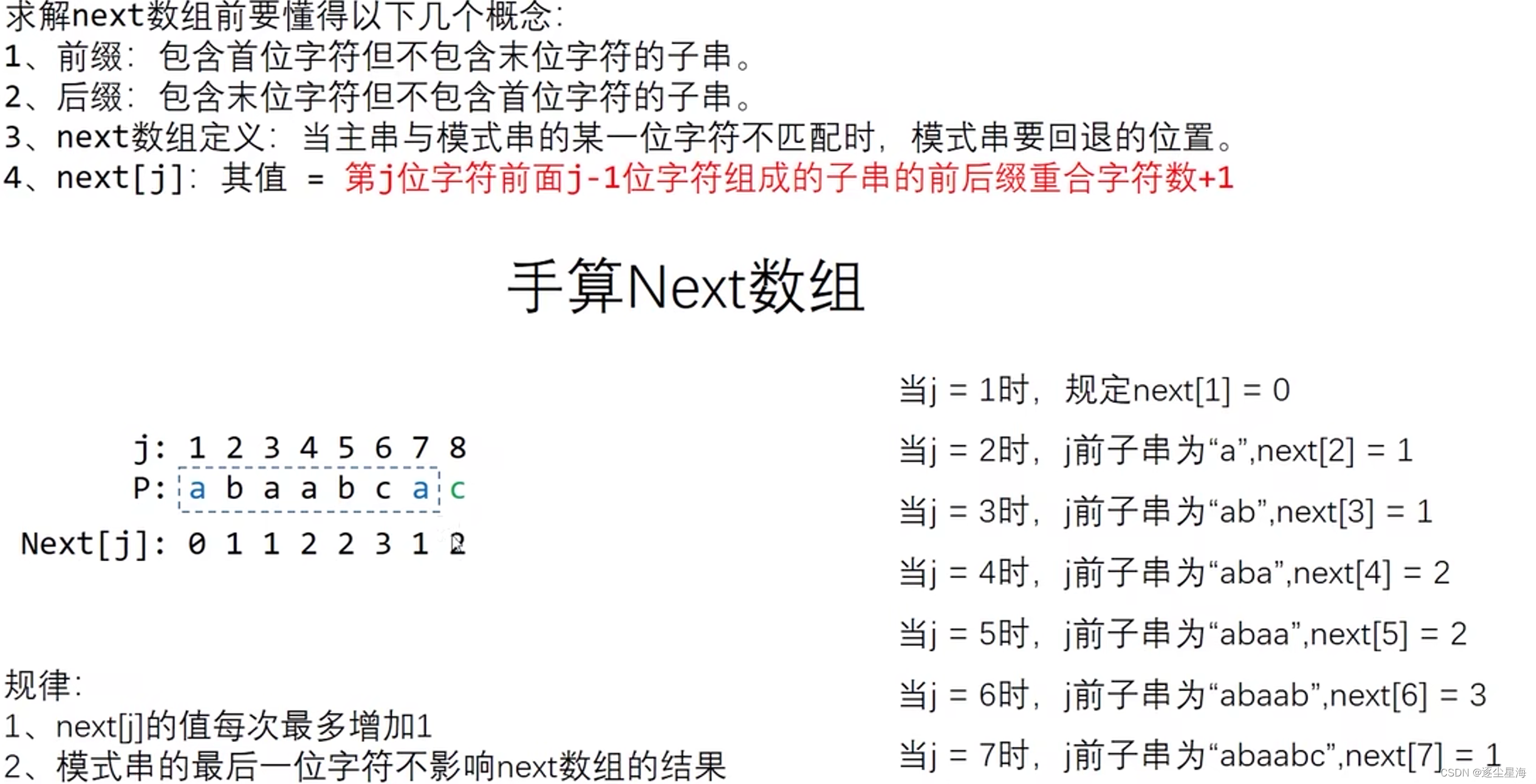
求出模式串的next函数值
-
-
next[ j ]的含义是: 在子串的第j个字符与主串发生失配时,则跳到子串的next[ j ]位置重新与主串当前位置进行比较。
-
next[j]=最大公共前后缀长度+1
-
-
对模式串与主串进行匹配比较。
-
若匹配则:比较下一个位置
-
若不匹配则:模式串的下标通过next函数的数值进行移动
-
代码:
代码讲解:【KMP算法之求next数组代码讲解】KMP算法之求next数组代码讲解_哔哩哔哩_bilibili(这个up讲的真的很清楚,一定要看!)
int Index_KMP (SString S,SString T, int pos)
{
i= pos,j =1;
while (i<S.length && j<T.length) {
if (j==0 || S[i]==T[j]) { i++;j++; }
else
j=next[j]; /*i不变,j后退*/
}
if (j>T.length) return i-T.length; /*匹配成功*/
else return 0; /*返回不匹配标志*/
}
// 求next数组
void get_next(String T, int *next){
int i = 1, j = 0;
next[1] = 0;
while (i < T.length){
if(j==0 || T.ch[i]==T.ch[j]){ //ch[i]表示后缀的单个字符,ch[j]表示前缀的单个字符
++i; ++j;
next[i] = j; //若pi = pj, 则next[j+1] = next[j] + 1
}else{
j = next[j]; //否则令j = next[j],j值回溯,循环继续
}
}
}next数组求解:
-
next[j+1]的最大值为next[j]+1。
-
如果Pk1不等于Pj,那么next[j+1]可能的次大值为next[next[j]]+1,以此类推即可高效求出next[j+1]。(重点)
KMP算法改进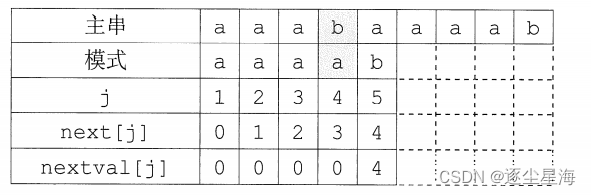
如果出现了上述的情况则需要再次递归,将next[j]修正为next[next[j]],直至两者不相等为止,更新后的数组命名为nextval。计算next数组修正值的算法如下,此时匹配算法不变。
void get_nextval(String T, int *nextval){
int i = 1, j = 0;
nextval[1] = 0;
while (i < T.length){
if(j==0 || T.ch[i]==T.ch[j]){ //ch[i]表示后缀的单个字符,ch[j]表示前缀的单个字符
++i; ++j;
if(T.ch[i] != T.ch[j]){ //若当前字符与前缀字符不同
nextval[i] = j; //则当前的j为nextval在i位置的值
}else{
//如果与前缀字符相同
//则将前缀字符的nextval值给nextval在i位置上的值
nextval[i] = nextval[j];
}
}else{
j = nextval[j]; //否则令j = next[j],j值回溯,循环继续
}
}
}例题 【单选题】Nextval在next的基础上得到的,已知串T “abab”的next数组为0112, J: 1 2 3 4 T串: a b a b next[j]: 0 1 1 2 nextval[j]: 0 1 0 1 求解过程如下: 首先nextval[1]=0, 因为next[2]=1,所以比较串T[2](即b)与T[1]( 即a),因为不相等,所以nextval[2]=next[2]=1; 因为next[3]=1,所以比较串T[3]( 即a)与T[1]( 即a),因为相等,所以nextval[3]=nextval[1]=0; 因为next[4]=2,所以比较串T[4]( 即b)与T[2]( 即b),因为相等,所以nextval[4]=nextval[2]=1 据此求得串“ababaabab”的nextval为()。 A. 010104101 B. 010102101 C. 010100011 D. 010101011
答案选A
注:本题在题目中详细的讲解了nextval数组的求法,可以作为理解的参考。
参考资料:
-
严蔚敏、吴伟民:《数据结构(C语言版)》
数组
一、数组的类型定义
数组是由类型相同的数据元素构成的有序集合,每个元素称为数组元素,每个元素受n个线性关系的约束(每个元素都在n个关系中,所以,可以通过下标访问对应的元素。
数组可以看成是线性表的推广,其特点是结构中的元素本身可以是某种结构的数,但属于同一数据类型。从组成线性表的元素角度看,数组是由具有某种结构的数据元素构成,广义表则是由单个元素或子表构成的。
-
与其他线性结构关系:
-
一维数组即为线性表,而二维数组可以定义为其数据元素为一维数组(线性表)的线性表。以此类推,N维数组是数据元素为N-1维数组的线性表。
-
从本质上讲,数组与顺序表、链表、栈和队列一样,都用来存储具有 "一对一" 逻辑关系数据的线性存储结构。
-
-
存储结构:高级语言中的数组是顺序结构;数据结构中的数组既可以是顺序的,也可以是链式结构。
抽象数据类型
ADT Array { 数据对象: ji = 0, ... , bi-1, i = 1, 2, ... , n, D = {aj1j2...jn|n ( >0 ) 称为数组的维数, bi是数组第i维的长度,ji是数组元素的第i维下标,aj1j2...jn属于ElemSet }
aabcde…… a是数组a的一维下标,若a=4,那么数组a的第一维的长度为4 b是数组a的二维下标,若b=6,那么数组a的第二维的长度为6 e是数组a的五维下标,若e=5,那么数组a的第五维的长度为5
数据关系: R = { R1, R2, R3..., Rn} Ri = {<aj1...j1...jn , aj1...j1+1...jn>|0<=jk<=bk-1 , 1<=k<=n 且 k不等于i , 0<=ji<=bi-2 , aj1...j1...jn与a~j1...j1+1...属于D,i=2,L,n}
a233是a234的直接前驱 a235是a234的直接后继
基本操作: (1)InitArray(&A,n,boundi,…,boundn) 操作结果:若维数n和各维长度合法,则构造相应的数组A,并返回OK (2)DestroyArray(&A) 操作结果:销毁数组A (3)Value(A,&e,index1,…,indexn) 初始条件:A是n维数组,e为元素变量,随后是n个下标值。 操作结果:若各下标不越界,则e赋值为所指定的A的元素值,并返回OK (4)Assign(&A,e,index1,…indexn) 初始条件:A是n维数组,e为元素变量,随后是n个下标值。 操作结果:若下标不越界,则e的值赋给所指定的A的元素,并返回OK
}ADT Array
注:数组元素个数的计算:a342 那么数组共有3维,长度分别为3,4,2,一共有3*4*2=24个元素
二维数组
二维数组可以看作是线性表的线性表: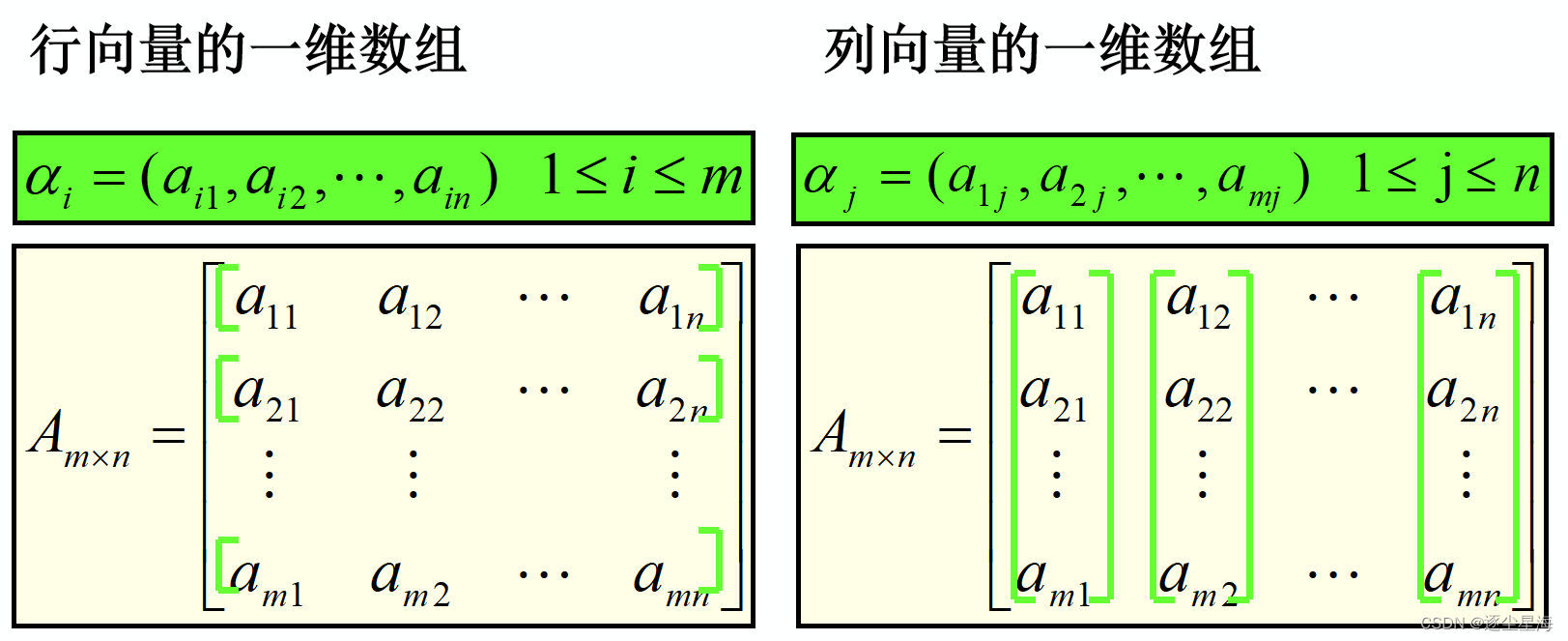
二维数组有行列之分,因此,有两种顺序存储方式
-
以行序为主序(低下标优先)BASIC、COBOL、PASCAL、C、JAVA、Basic
-
以列序为主序(高下标优先)FORTRAN
三维数组
二、数组的顺序存储
数组的基本操作不涉及数组结构的变化(插入、删除)。因此对于数组而言,采用顺序存储表示比较适合。
存储原理: 内存储器的结构是一维的,对于一维数组可直接采用顺序存储,用一维的内存存储表示多维数组,就必须按照某种次序将数组中元素排成一个线性序列,然后将这个线性序列存放在一维的内存储器中,这就是数组的顺序存储结构。
多维数组的存储
二维数组Amn:
-
以行为主的存储序列为:a11,a12,…,a1n,a21,a22,…,a2n,…,am1,am2,…,amn
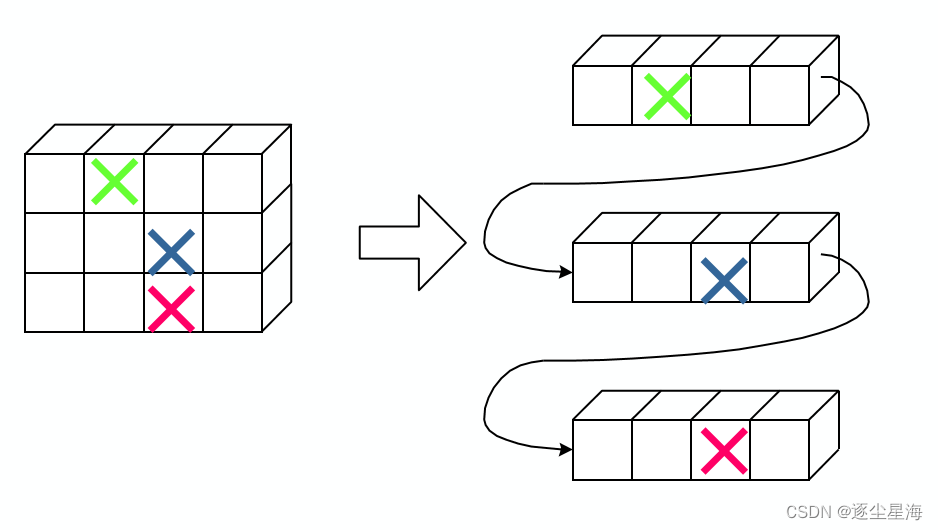
-
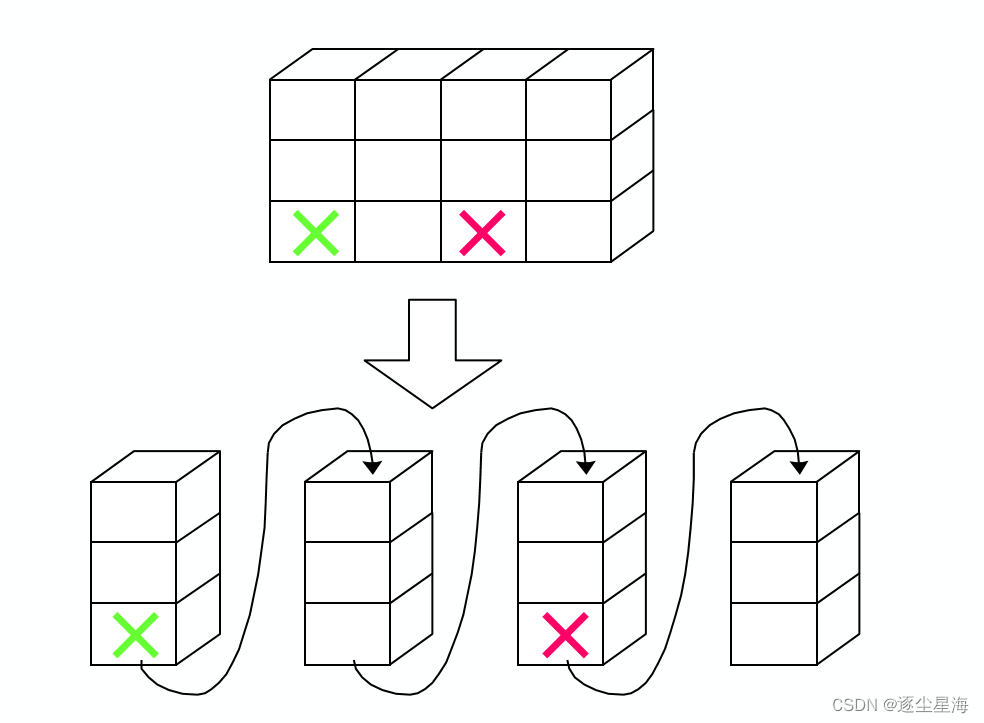
以列为主的存储序列为:a11,a21,…,am1,a12,a22,…,am2,…,a1n,a2n,…,amn
数组地址计算
计算:若数组的下标从(0,0)开始 (1)一维数组的地址计算 Loc(A[i])=Loc(A[0])+i✖size
(2)二维数组的地址计算 如果每个元素占size个存储单元: Loc(A[i][j])=Loc(A[0][0])+(i✖n+j)✖size 如果每个元素占一个存储单元: Loc(A[i][j])=Loc(A[1][1])+(i-1)✖n+(j-1)
-
如LOC(0, 0)是a00的地址 LOC(2, 2) = LOC(0, 0) + (2*3+2)L (L为每个元素占的存储单元) 解释:LOC(0,0)为第一个元素的地址。 2 * 3中的2表示2个第一维数组,3表示数组第二维的长度,3 * 2可以理解为跳过长度2的第一维数组,直接到LOC(2,0). +2表示跳过长度为2的第二维数组,所以就到LOC(2,2)了
-
行序为主序:
LOC(i, j) = LOC(s,t) + ((i-s)✖(n-t+1)+(j-t))✖L解释:假设二维数组A[s...m , t...n],每个元素占L个存储单位,LOC(i,j) 是aij的存储位置,LOC(s,t) 是ast的存储位置,即数组的起始存储位置。当数组以行序为主序进行存储的时候,则元素aij的前面存储了 (i-s) 行元素,每行有 (n-t+1) 个元素,aij所在行的全面则存储了j-t个元素。 -
列序为主序:
LOC(i, j) = LOC(s,t) + ((j-t)✖(m-s+1)+(i-s))✖L解释:假设二维数组A[s...m , t...n],每个元素占L个存储单位,LOC(i,j) 是aij的存储位置,LOC(s,t) 是ast的存储位置,即数组的起始存储位置。当数组以行序为主序进行存储的时候,则元素aij的前面存储了 (j-t) 列元素,每列有 (m-s+1) 个元素,aij所在列的前面面则存储了s-i个元素。
(3)三维数组的地址计算 Loc(A[i][j][k])=Loc(A[0][0][0])+(i✖m✖n+j✖n+k)✖size 当 j1,j2,j3的下限分别为c1,c2,c3,上限分别为d1,d2,d3时 Loc(A[j1][j2][j3])=Loc(A[c1][c2][c3])+(j1-c1)✖((d2-c2+1)✖(d3-c3+1)+(j2-c2)✖(d3-c3+1)+(j3-c3))✖size
(4)n维数组的地址计算 Loc(A[j1][j2]…[jn])=Loc(A[c1][c2]…[cn])+Σ(i=1到n)ai✖(ji-ci) 其中,ai=size✖Π(k=i+1到n)(dk-ck+1),1≤i≤n
由于计算各个元素存储位置的时间相等,所以存取数组中任一元素的时间也是相等的,即数组是一种随机存取结构。
三、特殊矩阵的压缩存储
压缩存储:是指为多个值相同的元只分配一个存储空间,对零元不分配空间。
1.对称矩阵
数组中元素满足公式:aij==aji ,即数据元素沿主对角线对应相等,这类矩阵称为对称矩阵。
所以我们只存储上三角/下三角矩阵(对角线+对角线上/下部分的元素)
公式: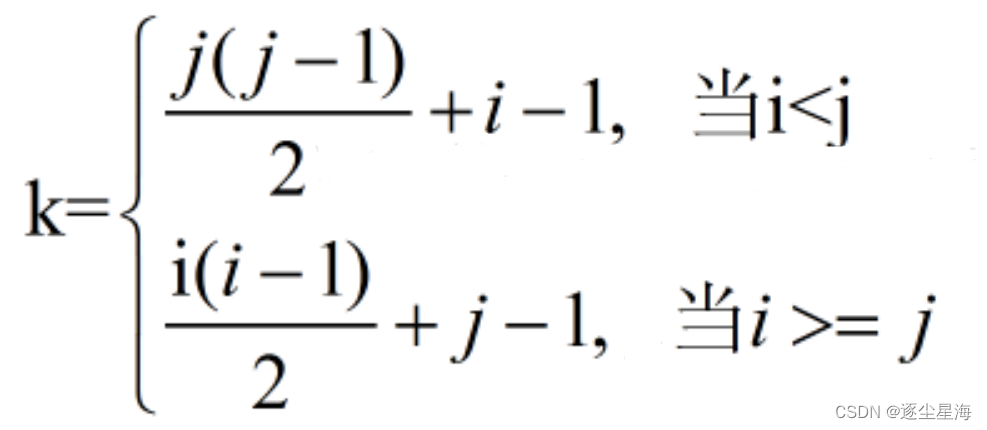
最终求得的 k 值即为该元素存储到数组中的位置(矩阵中元素的行标和列标都从 1 开始)。
若存储下三角矩阵,则存储元素aij全都有i>=j(1=<i,j<=n) 当i>=j时,k=i(i-1)/2+j-1 当j>=i时,k=j(j-1)/2+i-1(即用aji对应了上三角的aij)
此时一维数组sa[k]=aij,有了对应关系。
代码实现
对称矩阵的存储
#include <stdio.h>
#define len 5
int main(){
//定义对称矩阵
int A[len][len] = {1,2,3,4,5,
2,3,4,5,6,
3,4,5,6,7,
4,5,6,7,8,
5,6,7,8,9};
//定义存储数组
int B[len*(len + 1) / 2];
//进行压缩存储
for(int i = 0;i < len ;i++){
for(int j = 0;j <= i;j++){
if (i >= j) {
B[i*(i+1)/2+j] = A[i][j]; // 二维转一维
} else break;
}
}
printf("压缩矩阵的元素是:\n");
//输出B中元素
for (int k = 0; k < len*(len + 1) / 2; ++k) {
printf("%d ",B[k]);
}
return 0;
} 输出结果:
压缩矩阵的元素是: 1 2 3 3 4 5 4 5 6 7 5 6 7 8 9
对称矩阵的应用
#include <stdio.h>
#include <stdlib.h>
#define M 10
#define N 4
int main()
{
// 定义M和N两个对称矩阵
int a[M]={1,2,3,4,5,6,7,8,9,10};
int b[M]={1,1,1,1,1,1,1,1,1,1};
int c[N][N],d[N][N];
int i,j,k=0,s;
// 将压缩存储的对称矩阵“解压”
for(i=0;i<N;i++)
for(j=0;j<=i;j++)
{
c[i][j]=a[k];
d[i][j]=b[k];
k++;
}
for(i=0;i<N-1;i++)
for(j=i+1;j<N;j++)
{
c[i][j]=c[j][i];
d[i][j]=d[j][i];
}
printf("1、输出对称矩阵M:\n");
for(i=0;i<N;i++)
{
for(j=0;j<N-1;j++)
printf("%d ",c[i][j]);
printf("%d\n",c[i][j]);
}
printf("2、输出对称矩阵N:\n");
for(i=0;i<N;i++)
{
for(j=0;j<N-1;j++)
printf("%d ",d[i][j]);
printf("%d\n",d[i][j]);
}
// 矩阵相乘:
printf("3、两个对称矩阵M、N的积为:\n");
for(i=0;i<N;i++)
{
for(j=0;j<N-1;j++)
{
s=0;
for(k=0;k<N;k++) s+=c[j][k]*d[k][j];
printf("%d ",s);
}
s=0; for(k=0;k<N;k++) s+=c[j][k]*d[k][j];
printf("%d\n",c[i][j]+d[i][j]);
}
return 0;
}
//原文链接:https://blog.csdn.net/haduwi/article/details/106757784输出结果:
1、输出对称矩阵M: 1 2 4 7 2 3 5 8 4 5 6 9 7 8 9 10 2、输出对称矩阵N: 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 3、两个对称矩阵M、N的积为: 14 18 24 8 14 18 24 9 14 18 24 10 14 18 24 11
2.三角矩阵
对角线以下(或者以上)的数据元素(不包括对角线)全部为常数c。
存储方法:重复元素c共享一个元素存储空间,共占用n(n+1)/2+1个元素空间: sa[1.. n(n+1)/2+1]

存储原理:详情见可以在这个博客里看到,讲的非常详细:数据结构-二维数组-三角矩阵压缩存储majinshanNUN的博客-CSDN博客三角矩阵压缩存储公式
三角矩阵位置计算:Loc( aij)=Loc(a11)+[ i*(i-1)/2 +(j-1)]*L
代码实现(下三角)
#include<stdio.h>
int main() {
int a[5][5] = {
1, 0, 0, 0, 0,
5, 9, 0, 0, 0,
4, 6, 8, 0, 0,
2, 3,44,55, 0,
7,11,12,13,14,
};
//这个转化公式很重要
int len = sizeof(a[5])/sizeof(int);
int b[len*(len+1)/2], x, y, k;
printf("原二维数组:\n"); //输出原二维数组
for (x = 0; x < len; x++){
for (y = 0; y < len; y++){
if (a[x][y] < 10){ // 使得输出更加整齐
printf("%d ", a[x][y]);
} else {
printf("%d ", a[x][y]);
}
}
printf("\n");
}
printf("压缩后的一维数组:\n");
// 这里是压缩的重点!!!
for (int i = 0; i < len; i++){ //将二维数组中非0值压缩至一维数组中
for (int j = 0; j < len; j++){
if (i >= j) { //特殊矩阵,只压下三角的值
k = i * (i + 1) / 2 + j; // 二维数组和一维数组中原值的对应关系
b[k] = a[i][j];
} else break; // 提升性能
}
}
for (int l = 0; l < len*(len+1)/2; l++){ //输出一维数组
printf("%d ", b[l]);
}
printf("\n");
printf("输入要查询的 行号&&列号 : "); //输出要查询的数据
scanf("%d%d", &x, &y);
printf("\n");
printf("您查询的数据是: ");
// 这里在压缩后的数组里查找数值:
if (x < y) printf("0\n"); //如果上三角直接输出0
else printf("%d\n", b[(x - 1) * (x) / 2 + y - 1]); // 下三角输出一维数组中对应的值
return 0;
}输出结果:
原二维数组: 1 0 0 0 0 5 9 0 0 0 4 6 8 0 0 2 3 44 55 0 7 11 12 13 14 压缩后的一维数组: 1 5 9 4 6 8 2 3 44 55 7 11 12 13 14 输入要查询的 行号&&列号 : 3 2 您查询的数据是: 6
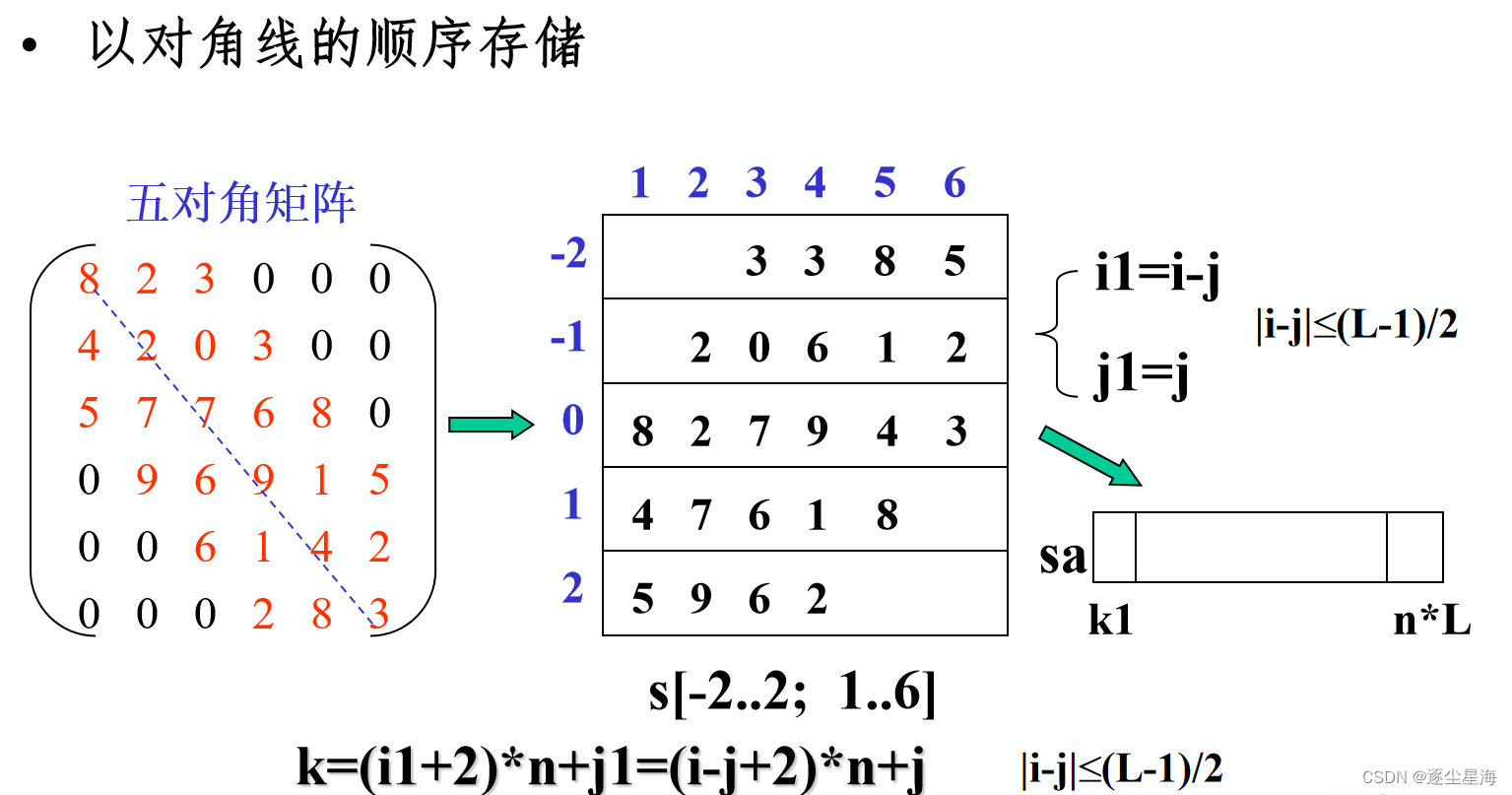
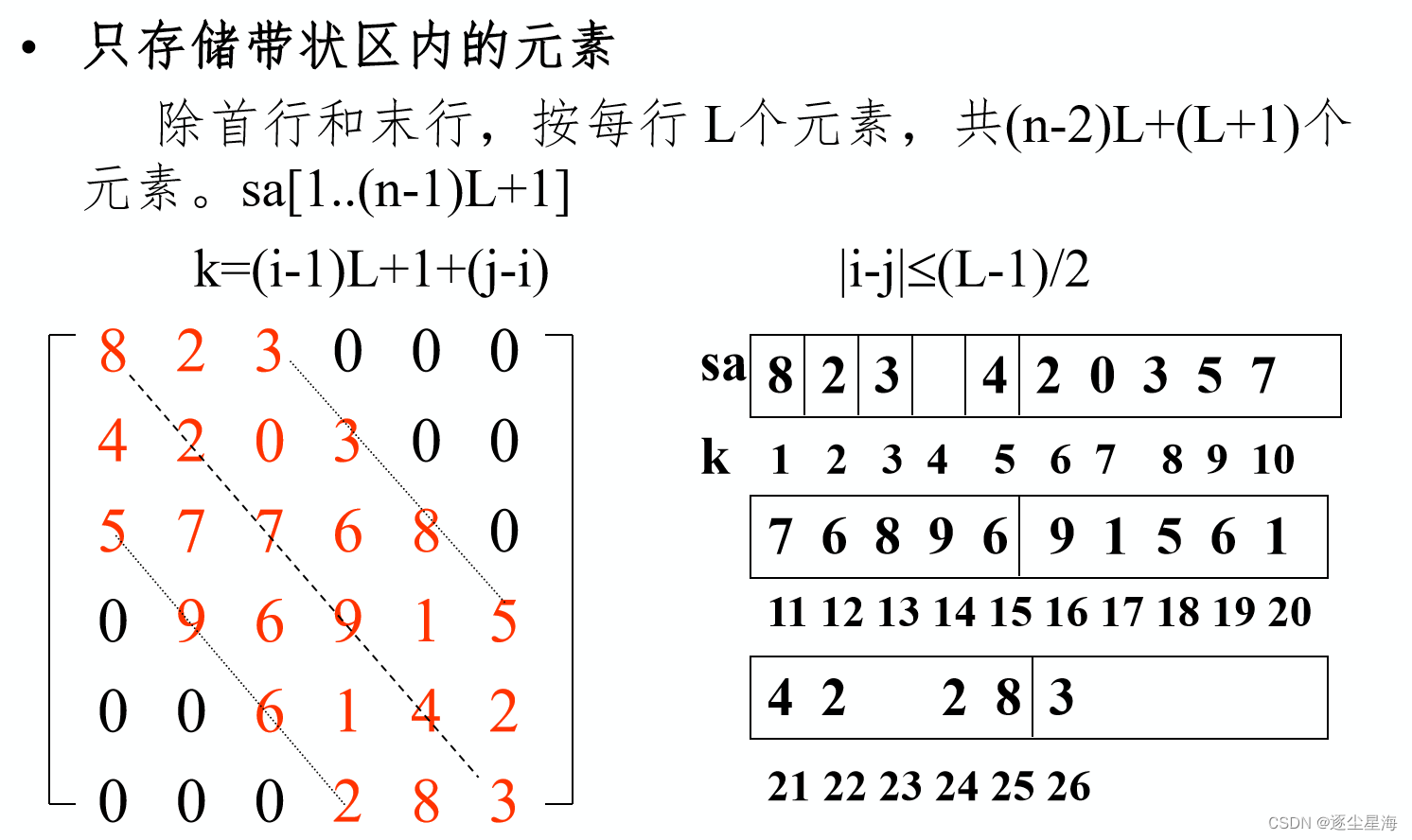
3.对角矩阵
若一个n阶方阵A满足其所有非零元素都集中在以主对角为中心的带状区域中,则称其为n阶对角矩阵。非零元素集中在主对角线及其两侧共L(奇数)条对角线的带状区域内 — L对角矩阵。
三对角矩阵: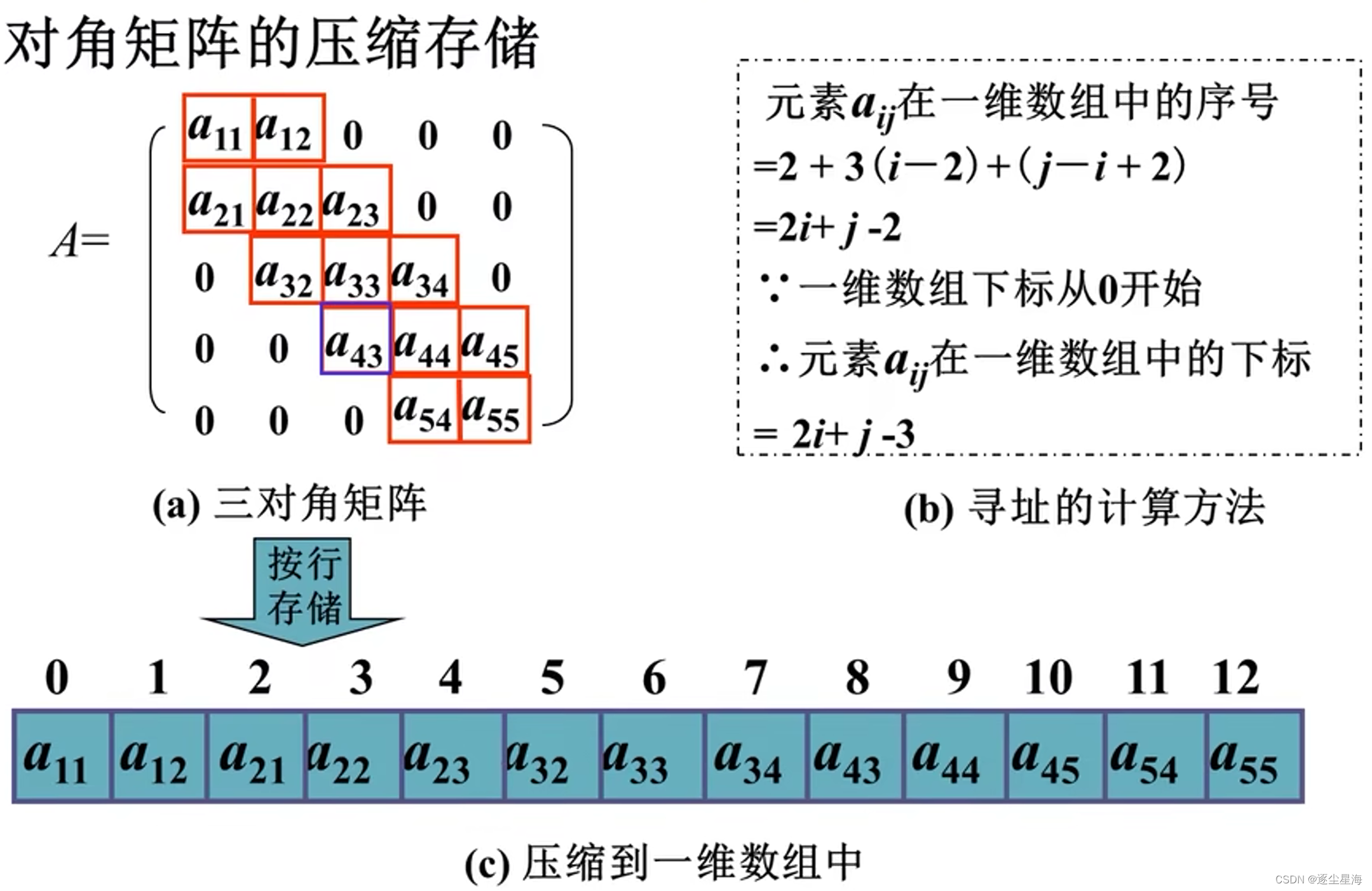
对角矩阵的位置计算:Loc(aij)=Loc(a11)+2(i-1)+(j-1)
对角矩阵
4.稀疏矩阵
三元组法(顺序存储)
顺序存储的方法:又称有序的双下标法,只存储矩阵中的非 0 元素,与前面的存储方法不同,稀疏矩阵非 0 元素的存储需同时存储该元素所在矩阵中的行标和列标。(三元组储存)
注意:为更可靠描述,通常再加一个“总体”信息:即总行数、总列数、非零元素总个数。
特点:
-
优点:非零元在表中按行序有序存储,便于进行按行顺序处理的矩阵运算。
-
缺点:不能随机存取,若按行号存取某一行中的非零元,则需从头开始进行查找。
行逻辑链接顺序表(顺序存储)
三元组顺序表每次提取指定元素都需要遍历整个数组,运行效率很低。 行逻辑链接的顺序表。它可以看作是三元组顺序表的升级版,即在三元组顺序表的基础上改善了提取数据的效率。
步骤:
-
将矩阵中的非 0 元素采用三元组的形式存储到一维数组 data 中,如图 2 所示(和三元组顺序表一样)
-
使用另一个数组记录矩阵中每行第一个非 0 元素在一维数组中的存储位置。
优点:如果想从行逻辑链接的顺序表中提取元素,则可以借助 第二个 数组提高遍历数组的效率。
十字链表法(链式存储)
十字链表法存储稀疏矩阵,该存储方式采用的是 "链表+数组" 结构
参考资料:数据结构(七)数组和广义表 - 简书 (jianshu.com)
优点:它能够灵活地插入因运算而产生的新的非零元素,删除因运算而产生的新的零元素,实现矩阵的运算。
在十字链表中,矩阵的每一个非零元素用一个结点表示,该结点除了(row,col,value)外,还有两个域:
right: 用于链接同一行中的下一个非零元素;
down:用以链接同一列中的下一个非零元素。
使用十字链表压缩存储稀疏矩阵时,矩阵中的各行各列都各用一个链表存储,与此同时,所有行链表的表头存储到一个数组(rhead),所有列链表的表头存储到另一个数组
拿结点A说明,该结点对应两个链表(绿色和黄色标记的)。绿色链表表示以结点A为弧头的弧组成的链表。黄色链表表示以结点A为弧尾的弧组成的链表。如下图所示: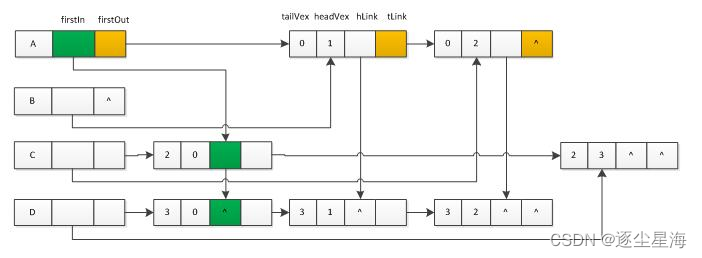
5.矩阵运算
该板块的所有内容均来自下面的博客:
作者:hadoop_a9bb 链接:https://www.jianshu.com/p/d7d5545012e2 来源:简书
稀疏矩阵的快速转置算法
稀疏矩阵快速转置算法和普通算法的区别仅在于第 3 步,快速转置能够做到遍历一次三元组表即可完成第 3 步的工作。 稀疏矩阵的快速转置是这样的,在普通算法的基础上增设两个数组(假 设分别为 array 和 copt):
-
array 数组负责记录原矩阵每一列非 0 元素的个数。以图 1 为例,则对应的 array 数组如图 20 所示:

图20:每一列非0元素的个数
图 2 中 array 数组表示,原稀疏矩阵中第一列有 1 个非 0 元素,第二列有 2 个非 0 元素
。
-
copt 数组用于计算稀疏矩阵中每列第一个非 0 元素在新三元组表中存放的位置。 我们通常默认第一列首个非 0 元素存放到新三元组表中的位置为 1,然后通过 cpot[col] = cpot[col-1] + array[col-1] 公式可计算出后续各列首个非 0 元素存放到新三元组表的位置。拿图 1 中的稀疏矩阵来说,它对应的 copt 数组如图 21 所示:
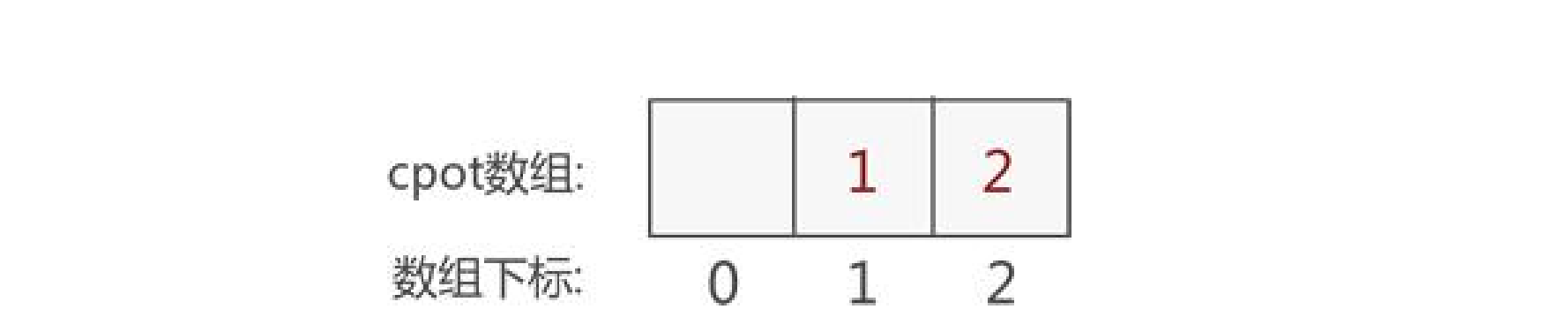
图21:copt数组示意图
图 21 中的 copt 数组表示,原稀疏矩阵中第 2 列首个非 0 元素存放到新三元组表的位置为 2。
注意,cpot[col] = cpot[col-1] + array[col-1] 的意思是,后一列首个非 0 元素存放的位置等于前一列首个非 0 元素的存放位置,加上该列非 0 元素的个数。由此可以看出,copt 数组才是最终想要的,而 array 数组的设立只是为了帮助我们得到 copt 数组。
稀疏矩阵快速转置算法的时间复杂度为 O(n)。即使在最坏的情况下(矩阵中全部都是非 0 元素),该算法的时间复杂度也才为 O(n2)。
矩阵乘法
矩阵相乘的前提条件是:乘号前的矩阵的列数要和乘号后的矩阵的行数相等。且矩阵的乘法运算没有交换律,即 AB 和 BA 是不一样的。假设下面是矩阵A:
| 3 | 0 | 0 | 5 |
|---|---|---|---|
| 0 | -1 | 0 | 0 |
| 2 | 0 | 0 | 0 |
下面是矩阵B:
| 0 | 2 |
|---|---|
| 1 | 0 |
| -2 | 4 |
| 0 | 0 |
由于矩阵 A 的列数和矩阵 B 的行数相等,可以进行 AB 运算(不能进行 BA 运算)。计算方法是:用矩阵 A 的第 i 行和矩阵 B 中的每一列 j 对应的数值做乘法运算,乘积一一相加,所得结果即为矩阵 C 中第 i 行第 j 列的值。
例如:C12 = 6 是因为:A11B12 + A12B22 + A13B32 + A14B42,即 32 + 00 + 04 + 50 = 6 ,因为这是 A 的第 1 行和 B的第 2 列的乘积和,所以结果放在 C 的第 1 行第 2 列的位置。
结果矩阵C为:
| 0 | 6 |
|---|---|
| -1 | 0 |
| 0 | 4 |
例如,A 是 m1n1 矩阵,B 是 m2n2 矩阵(前提必须是 n1 == m2 ): 普通算法的时间复杂度为 O(m1*n2*n1)
基于行逻辑链接的顺序表的矩阵乘法
具体过程不描述,请自行百度,这里只说结论。
当稀疏矩阵 Amn 和稀疏矩阵 Bnp 采用行逻辑链接的顺序表做乘法运算时,在矩阵 A 的列数(矩阵 B 的行数) n 不是很大的情况下,算法的时间复杂度相当于 O(m*p),比普通算法要快很多
矩阵加法
矩阵之间能够进行加法运算的前提条件是:各矩阵的行数和列数必须相等。
在行数和列数都相等的情况下,矩阵相加的结果就是矩阵中对应位置的值相加所组成的矩阵,例如:
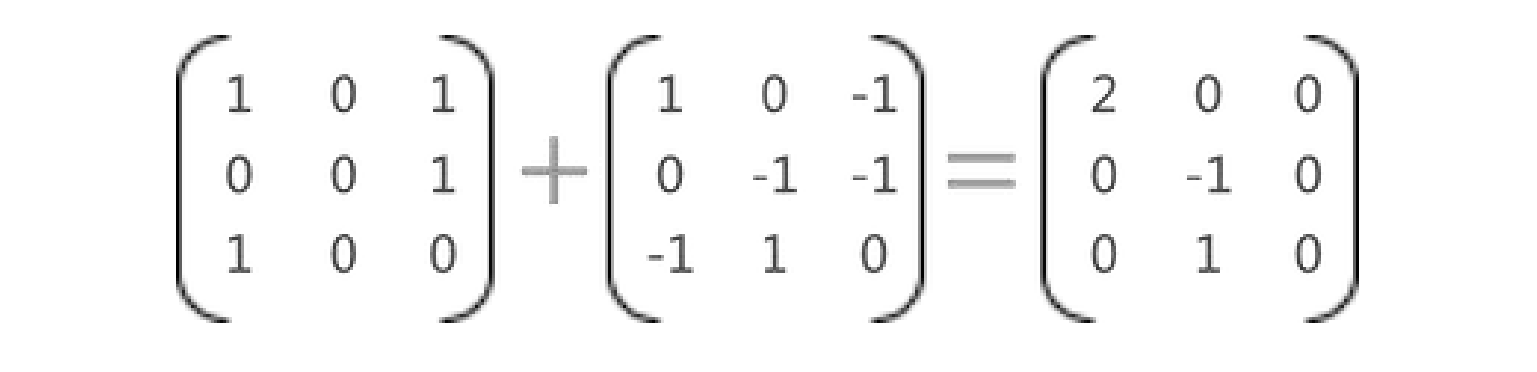
图22:矩阵相加
十字链表法 过程有点复杂,具体请自行百度,这里只说结论 使用十字链表法解决稀疏矩阵的压缩存储的同时,在解决矩阵相加的问题中,对于某个单独的结点来说,算法的时间复杂度为一个常数(全部为选择结构),算法的整体的时间复杂度取决于两矩阵中非 0 元素的个数。
广义表
一、定义
广义表是线性表的推广,也称为列表。n ( >=0 )个表元素组成的有限序列,记作LS = (a0, a1, a2, …, an-1) LS是表名,ai是表元素,它可以是表 (称为子表),可以是数据元素(称为原子)。
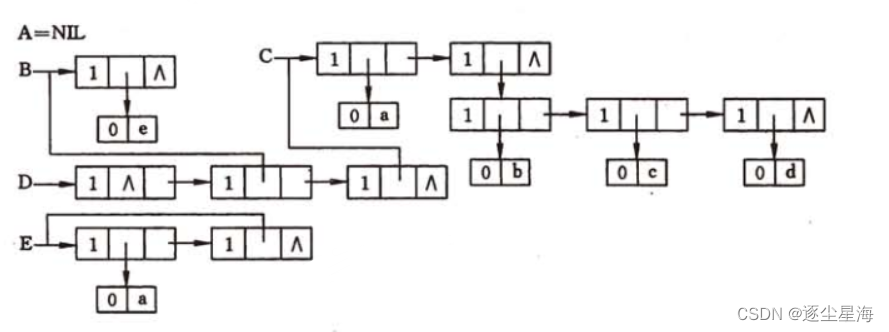
以下是广义表存储数据的一些常用形式:
-
A = ():A 是一个空表,其长度为0
-
B = (e):广义表 B 中只有一个原子 e。
-
C = (a,(b,c,d)) :广义表 C 的长度为2,两个元素分别为 原子a 和 子表 (b,c,d)。
-
D = (A,B,C):广义表 D 的长度为3,三个元素都是广义表,分别是A、B和C。这种表示方式等同于 D = ((),(e),(b,c,d)) 。
-
E = (a,E):广义表 E 的长度为2,这是一个递归广义表,等同于:E = (a,(a,(a,…)))。
-
F=( ( ) ):广义表F长度为1,元素为空表
特点:
-
列表是一个多层次的结构 列表的元素是可以嵌套的
-
列表可以被其他列表共享 如:D中有A,B,C三个子表,则在D中可以不必列出子表的值,而是通过子表的名称来引用。
-
列表可以为一个递归的表
-
两个重要运算:
-
取表头 GetHead(LS):取出的表头为非空广义表的第一个元素,可以是一个原子,也可以是一个子表
-
取表尾 GetTail(LS):取出的表尾为除去表头之外,由其余元素构成的表。即表尾一定是一个广义表。
-
二、广义表存储结构
由于广义表中数据元素可以具有不同的结构,所以很难用顺序结构统一,所以一般使用链式存储结构,常用的链式存储结构有两种:头尾链表的存储和扩展线性链表的存储结构。
1.头尾链表
由于广义表的数据结构可能为原子或广义表,由此需要两种结构的结点:
-
表结点,用来表示广义表。由三个域组成:标志域、指示表头的指针域、指示表尾的指针域
-
原子结点,用以表示原子。由两个域组成:标志域和值域
广义表的头尾链表存储表示:
//ATOM=0表示原子,LIST=1表示子表
typedef enum{ATOM,LIST} ElemTag;
typedef struct GLNode
{
ElemTag tag; //公共部分,用于区分原子结点和表结点
union // 原子结点和表结点的联合部分
{
// 以下的部分根据tag二选一
AtomType atom; //1.atom 是原子结点的值域,AtomTupe由用户自己定义
struct
{
struct *GLNode *hp;
struct *GLNode *tp;
}ptr; // 2.ptr是表结点的指针域,ptr.hp和ptr.tp分别指向表头和表尾
};
}*GList; // 广义表类型特点:
-
除空表的表头指针为空,对任何非空广义表,其表头指针均指向一个表结点,且该结点中的hp域指示4广义表表头,tp域指向广义表表尾
-
容易分清列表中原子和子表所在层次
-
最高层的表结点个数即为广义表的长度。
2.扩展线性链表
把广义表看成是包含 n个并列子表(原子也视为子表)的表
typedef enum
{
ATOM, // 0,表示原子
LIST // 1,表示列表
} ElemTag;
typedef struct GLNode
{
ElemType tag; // 公共部分,用于区分原子结点和表结点
union
{
AtomType atom; // 原子结点的值域
struct GLNode *hp; // 表结点的表头指针
};
struct GLNode *tp; //相当于与线性链表的next,指向下一个结点
} *GList;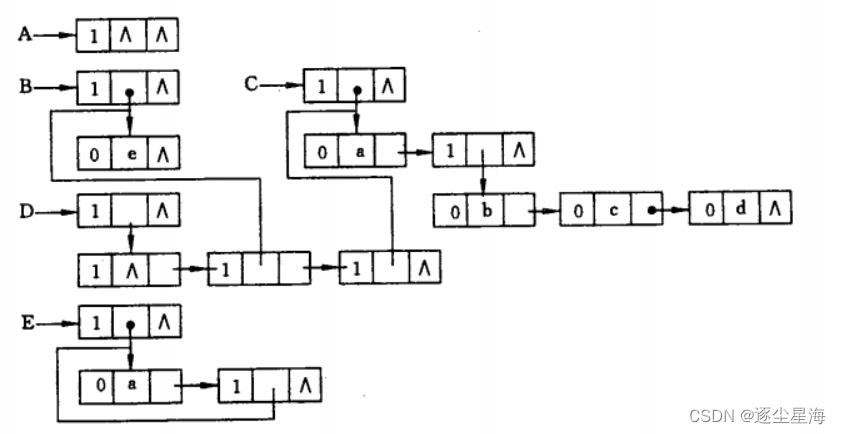















 4036
4036











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









