







无pushdown的线段树 + 扫描线 + 离散化
链接 AcWing_247
扫描过程流程:
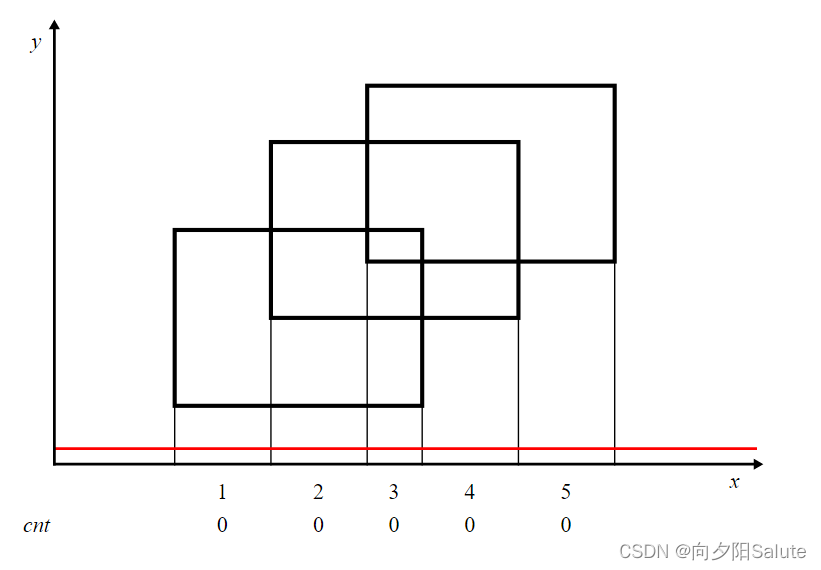
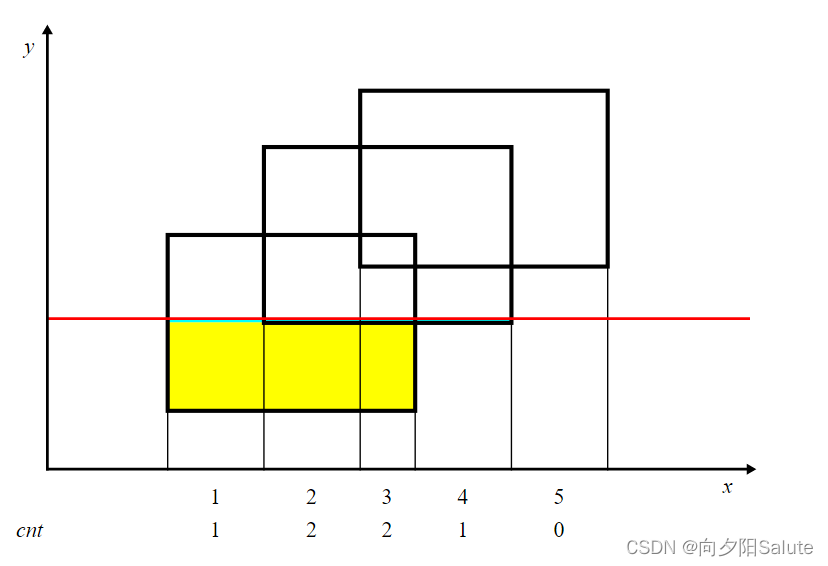
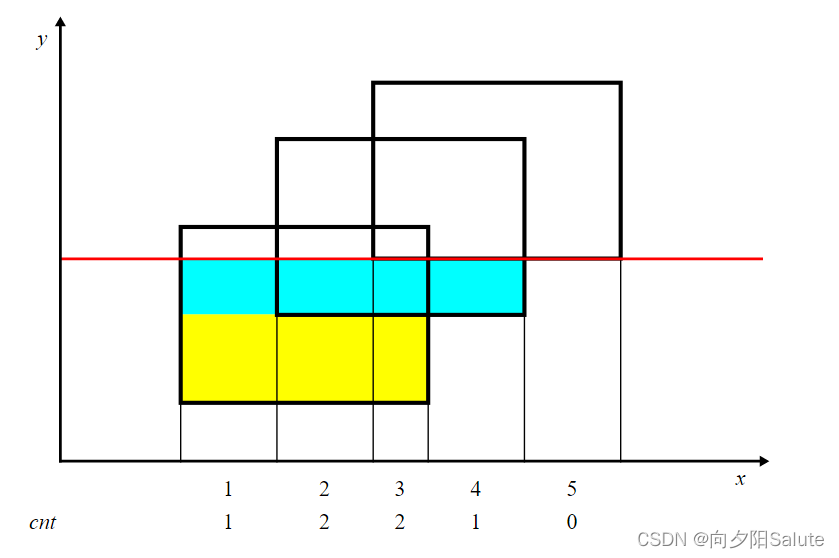
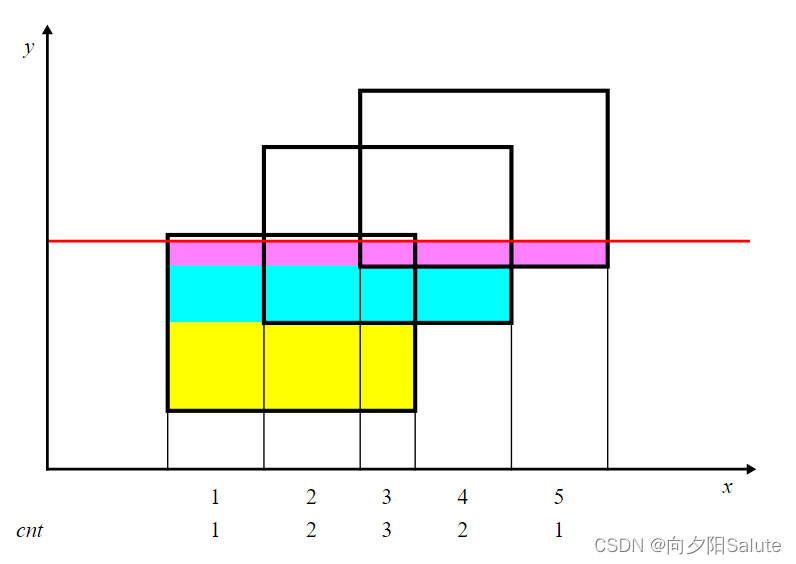
图片来自:acwing上一位大佬的评论

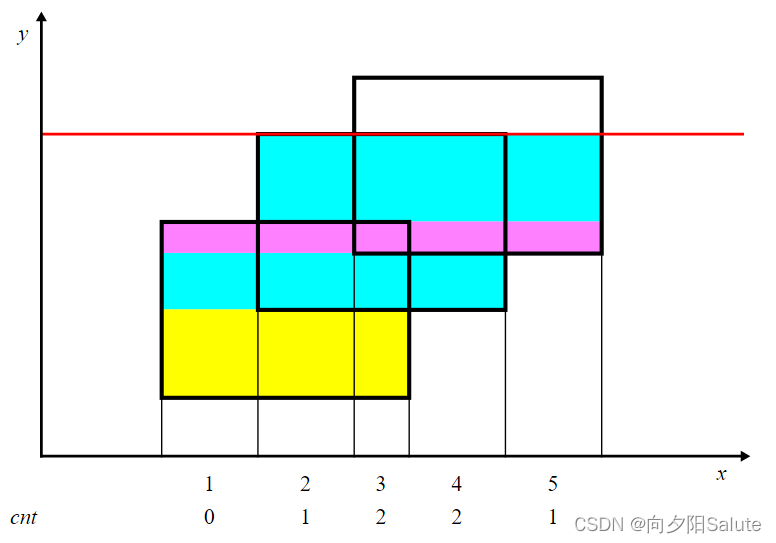
- 只不过我们这里的dy不是趋近无穷小,而是一段一段的距离,而L(y)就是我们扫描到的上下边的长度,这个L(y)函数我们要用线段树来实现,我们要存下边的信息来记录y的变化范围,保存下来的边就是图上标出来的每个矩形的上下两条边a1,a2,保存的信息就是每条线段的y坐标(我们根据这个模拟y的范围),两个x坐标(线段树是维护的一小段一小段的区间,我们就是通过这两个x坐标来修改线段树的区间),边的正负的信息(既然我们是从下向上扫描,那么就是下边为正,上边为负,当我们扫描到的是矩形的下边,那么这段区间加一,负数的话就是区间减一,正好一对一对的抵消,非常巧妙)
- 这个题的重点还是线段树上的理解,因为这个题涉及到了区间的修改,但我们不用pushdown,也不需要query函数,我们每次找的结果都是根节点的len(每次根节点的长度都是正确的),我们线段树维护的值为l,r,cnt,len分别为tr[u]的范围(tr[u].l,tr[u].r+1),这里值得说一下的是,这个线段树维护的是一个个区间,并且维护的是上图中X坐标离散化后的区间,即每一个叶子节点比如tr[i].l==tr[i].r,但它表示的是x坐标离散化后的tr[i].l到tr[i].l+1 这段区间 ,比如vector ys数组为离散化后的数组,那么tr[i]表示的区间范围在 x坐标上就是ys[tr[i].l]到ys[tr[i].l+1] 这一段区间的信息,这里也和平常的线段树表示的区间范围不同一般的线段树都是表示tr.l到tr.r这个范围。
- 对于根节点len的正确性的判断:虽然我们没有pushdown来传下去懒标记,从而不影响要添加的懒标记,但这题的标记是区间覆盖次数,并且每次要的答案是区间覆盖的总长度,不管覆盖多少次,cnt不管多大,回溯上来的时候它的区间和只会加一次,对于cnt==0的情况也符合,0的话并且儿子也没有len的话就0呗,并且cnt不会小于零(一 一配对嘛)
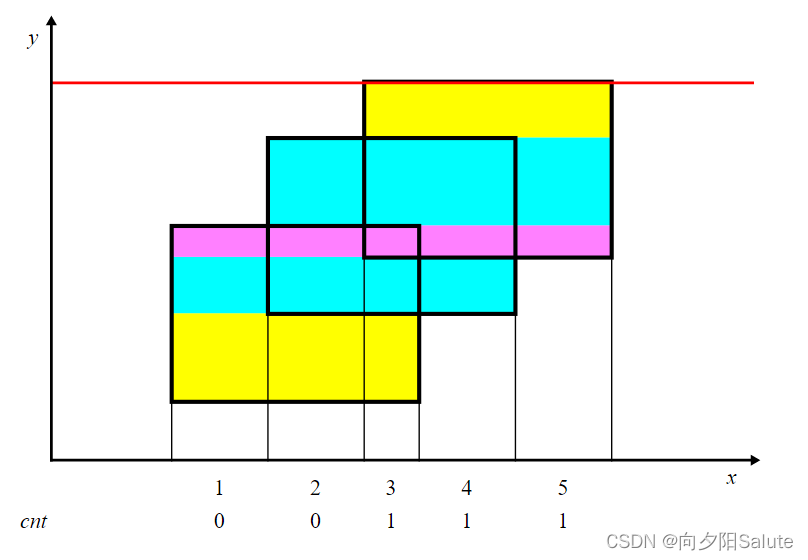
- 这个题的pushup也不太一样,咋一看和平时写的一样,但是在处理父节点add有值,但儿子add归0后的pushup直接改变了父节点,看图,橙色为错误改变父节点区间信息:

所以我们要充分利用扫描线的性质,即线段都是成对出现,t[i].cnt表达的含义是当前节点的覆盖次数,如果它的cnt==0,那么这段区间的长度就由它的儿子更新(这时候它的儿子都是真的,存在的,即找更加细分的片段相加就是它这个区间的长度),当一个区间的儿子节点cnt归0时,也不会影响它的父节点,他这个区间的值再由更小的细分来更新,即一句话,pushup不需要向前看,不需要向父节点看,向儿子看一下就行了!!!,也就是说当cnt>0时就是这段区间的len,cnt=0时等于拉两个儿子len的和.
就我们这个题目来说,我们从上向下扫描
代码
#include<bits/stdc++.h>
using namespace std;
const int N=1e4+10;
struct Segment{
double x,y1,y2;
int k;
bool operator<(const Segment &s) const
{
return x<s.x;
}
}seg[N*2];
//n个输入,每次输入四个坐标即两条我们需要存信息的边,也就是两个线段
//我们线段树存的区间,这样下来一共2n-1个区间,本来N*4是对于n来说的,现在2n-1所以就是n*4*2=8*n;
struct node{
int l,r;
int cnt;
double len;
}tr[N<<3];
int n;
//用来存放离散化后的存的y轴的信息(我们按照上面的图模型来说,这里我们建立的x,y与题目给出的x,y轴不一样,但是不影响后续的做题,和输入对应起来就行);
vector<double> vs;
void build(int u,int l,int r)
{
tr[u]={l,r,0,0};
//printf("t %d %d %d\n",u,l,r);
if(l==r) return ;
else
{
int mid=l+r>>1;
build(u<<1,l,mid);
build(u<<1|1,mid+1,r);
}
}
int find(double x)//和它相等的最左边的下标
{
int l=0,r=vs.size();
while(l<r)
{
int mid=l+r>>1;
if(vs[mid]>=x)
{
r=mid;//缩小右边,不断找到最左边的它
}
else
{
l=mid+1;
}
}
return l;
}
void pushup(int u)
{
if(tr[u].cnt)
{
tr[u].len=(vs[tr[u].r+1]-vs[tr[u].l]);
}
else if(tr[u].l!=tr[u].r)
{
tr[u].len=tr[u<<1].len+tr[u<<1|1].len;
}
else//防止递归叶子节点的孩子照成Sg
{
tr[u].len=0;
}
}
void modify(int u,int l,int r,int k)
{
if(tr[u].l>=l&&tr[u].r<=r)
{
tr[u].cnt+=k;
pushup(u);
}
else
{
int mid=tr[u].l+tr[u].r>>1;
if(l<=mid) modify(u<<1,l,r,k);
if(r>mid) modify(u<<1|1,l,r,k);
pushup(u);
}
}
int main()
{
int t=1;
while((cin>>n),n)
{
int idx=0;
vs.clear();
for(int i=0;i<n;i++)
{
double x1,y1,x2,y2;
scanf("%lf%lf%lf%lf",&x1,&y1,&x2,&y2);
seg[idx++]={x1,y1,y2,1};
seg[idx++]={x2,y1,y2,-1};
vs.push_back(y1);
vs.push_back(y2);
}
sort(seg,seg+2*n);
// for(int i=0;i<2*n;i++)
// {
// cout<<seg[i].x<<" "<<seg[i].y1<<" "<<seg[i].y2<<" "<<seg[i].k<<endl;
// }
sort(vs.begin(),vs.end());
//unique是给定排好序的开头结尾,返回去重后的结尾
//erase是给定开头结尾然后删去,就是从重复的地方开始到最后
vs.erase(unique(vs.begin(),vs.end()),vs.end());
// for(int i=0;i<vs.size();i++)
// {
// cout<<vs[i]<<" ";
// }
//cout<<endl;
build(1,0,vs.size()-2);//一共2n-1个区间,维护的区间从vs[0]开始,维护(vs[0]--vs[1]),(vs[1]--vs[2])的一个个区间
double res=0;//存一下答案
for(int i=0;i<2*n;i++)
{
if(i)//第一个线段无法求面积,从第二个开始
{
//cout<<"len: "<<tr[1].len<<endl;
res+=tr[1].len*(seg[i].x-seg[i-1].x);
}
//因为线段树维护的是vs[tr[i].l],vs[tr[i].r+1],所以我们传入l,r-1就可以了
modify(1,find(seg[i].y1),find(seg[i].y2)-1,seg[i].k);
}
printf("Test case #%d\n",t++);
printf("Total explored area: %.2f\n\n",res);
}
return 0;
}


















 628
628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











