







实验名称:红外遥控实验
接线说明:
实验现象:下载程序后,数码管上显示数码管上显示红外解码遥控器键值
注意事项:红外接收头凸起处要与PCB板接口凸起丝印处对应
***************************************************************************************/
#include "public.h"
#include "smg.h"
#include "ired.h"
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
u8 ired_buf[3];
ired_init();//红外初始化
while(1)
{
ired_buf[0]=gsmg_code[gired_data[2]/16];//将控制码高4位转换为数码管段码
ired_buf[1]=gsmg_code[gired_data[2]%16];//将控制码低4位转换为数码管段码
ired_buf[2]=0X76;//显示H的段码
smg_display(ired_buf,6);
}
}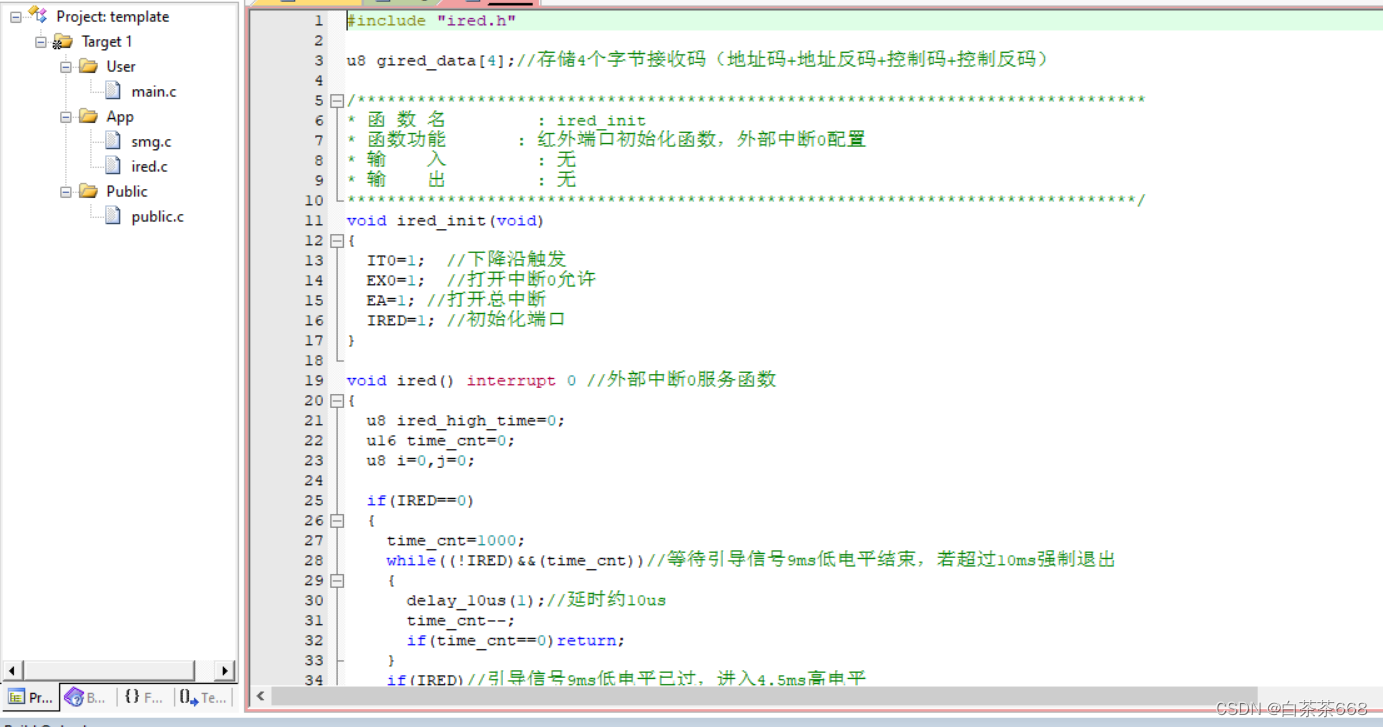

#include "ired.h"
u8 gired_data[4];//存储4个字节接收码(地址码+地址反码+控制码+控制反码)
/*******************************************************************************
* 函 数 名 : ired_init
* 函数功能 : 红外端口初始化函数,外部中断0配置
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void ired_init(void)
{
IT0=1; //下降沿触发
EX0=1; //打开中断0允许
EA=1; //打开总中断
IRED=1; //初始化端口
}
void ired() interrupt 0 //外部中断0服务函数
{
u8 ired_high_time=0;
u16 time_cnt=0;
u8 i=0,j=0;
if(IRED==0)
{
time_cnt=1000;
while((!IRED)&&(time_cnt))//等待引导信号9ms低电平结束,若超过10ms强制退出
{
delay_10us(1);//延时约10us
time_cnt--;
if(time_cnt==0)return;
}
if(IRED)//引导信号9ms低电平已过,进入4.5ms高电平
{
time_cnt=500;
while(IRED&&time_cnt)//等待引导信号4.5ms高电平结束,若超过5ms强制退出
{
delay_10us(1);
time_cnt--;
if(time_cnt==0)return;
}
for(i=0;i<4;i++)//循环4次,读取4个字节数据
{
for(j=0;j<8;j++)//循环8次读取每位数据即一个字节
{
time_cnt=600;
while((IRED==0)&&time_cnt)//等待数据1或0前面的0.56ms结束,若超过6ms强制退出
{
delay_10us(1);
time_cnt--;
if(time_cnt==0)return;
}
time_cnt=20;
while(IRED)//等待数据1或0后面的高电平结束,若超过2ms强制退出
{
delay_10us(10);//约0.1ms
ired_high_time++;
if(ired_high_time>20)return;
}
gired_data[i]>>=1;//先读取的为低位,然后是高位
if(ired_high_time>=8)//如果高电平时间大于0.8ms,数据则为1,否则为0
gired_data[i]|=0x80;
ired_high_time=0;//重新清零,等待下一次计算时间
}
}
}
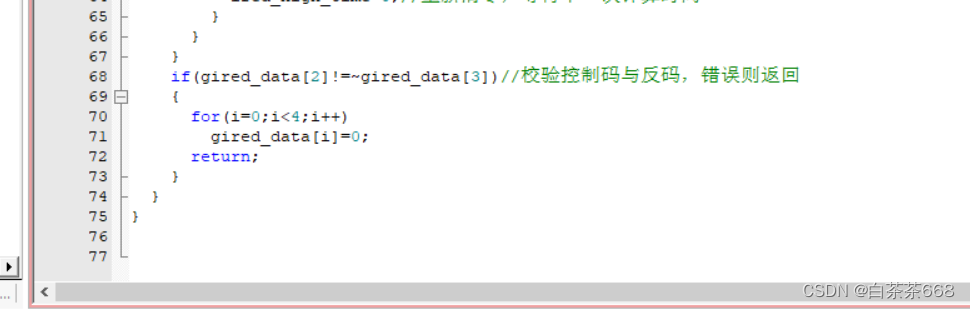
if(gired_data[2]!=~gired_data[3])//校验控制码与反码,错误则返回
{
for(i=0;i<4;i++)
gired_data[i]=0;
return;
}
}
}
#include "smg.h"
//共阴极数码管显示0~F的段码数据
u8 gsmg_code[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
/*******************************************************************************
* 函 数 名 : smg_display
* 函数功能 : 动态数码管显示
* 输 入 : dat:要显示的数据
pos:从左开始第几个位置开始显示,范围1-8
* 输 出 : 无
*******************************************************************************/
void smg_display(u8 dat[],u8 pos)
{
u8 i=0;
u8 pos_temp=pos-1;
for(i=pos_temp;i<8;i++)
{
switch(i)//位选
{
case 0: LSC=1;LSB=1;LSA=1;break;
case 1: LSC=1;LSB=1;LSA=0;break;
case 2: LSC=1;LSB=0;LSA=1;break;
case 3: LSC=1;LSB=0;LSA=0;break;
case 4: LSC=0;LSB=1;LSA=1;break;
case 5: LSC=0;LSB=1;LSA=0;break;
case 6: LSC=0;LSB=0;LSA=1;break;
case 7: LSC=0;LSB=0;LSA=0;break;
}
SMG_A_DP_PORT=dat[i-pos_temp];//传送段选数据
delay_10us(100);//延时一段时间,等待显示稳定
SMG_A_DP_PORT=0x00;//消音
}
}
#include "public.h"
/*******************************************************************************
* 函 数 名 : delay_10us
* 函数功能 : 延时函数,ten_us=1时,大约延时10us
* 输 入 : ten_us
* 输 出 : 无
*******************************************************************************/
void delay_10us(u16 ten_us)
{
while(ten_us--);
}
/*******************************************************************************
* 函 数 名 : delay_ms
* 函数功能 : ms延时函数,ms=1时,大约延时1ms
* 输 入 : ms:ms延时时间
* 输 出 : 无
*******************************************************************************/
void delay_ms(u16 ms)
{
u16 i,j;
for(i=ms;i>0;i--)
for(j=110;j>0;j--);
}
纷传单片机学习资料放在纷传小程序里了,需要的可以加入圈子有资料百度网盘下载地址及提取码。

















 1426
1426











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











