







前言:为了参加本届的人工智能大赛,特地整了点机器狗相关的操作知识,包括实际连接和代码操作,特此记录一番。不一定适用所有。
我用到的物料:
1、YoboGo机械狗、网线
2、VMware虚拟机,ubuntu 镜像
3、运行代码track1.10
一、基础配置
1、准备好虚拟机,VMware 系统包
运行ubuntu 镜像:

安装预编译的 OpenCV 库
sudo apt-get update
sudo apt-get install libopencv-dev
2、配置libopencv_videoio.so.5.0
如果提示:“./track: error while loading shared libraries: libopencv_videoio.so.5.0: cannot open shared object file: No such file or directory ”
查找是否存在
sudo find / -name libopencv_videoio.so.5.0存在:修改可执行文件的 RPATH 或 RUNPATH
//使用 patchelf 工具:
sudo apt-get install patchelf
patchelf --set-rpath /home/user/track1.10/build/lib ./track
二、连接相关
1.与机器狗建立连接
在连接处选择robot,(需要你的电脑和机械狗用网线连接)
连接后:进行ping测试,比如我的机器狗 IP 地址为10.0.0.34
ping通了后,SSH连接机械狗
ssh user@10.0.0.34连接后如下:
2、文件传输:
将准备好的代码,存入机械狗的本地数据中(比如我的为 home/user文件夹 )
scp -r track1.10/ user@10.0.0.34:/home/user/ 三、实际运行
1、调整颜色阈值
在连接Robot的操作窗口中,输入:
cd track1.10/build/
sudo ./track stop showImage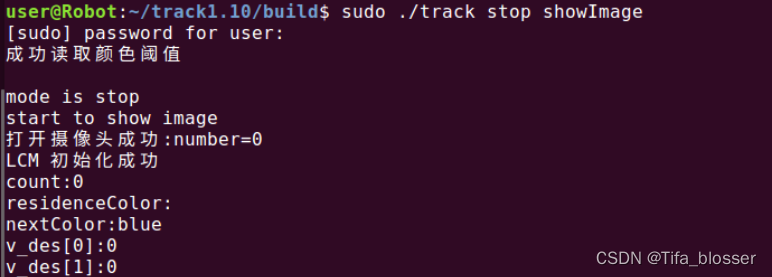
它大致长这样:
注意:如果这里有提示“error while loading shared libraries: libopencv_videoio.so.5.0: cannot open shared object file: No such file or directory”
查找是否存在
sudo find / -name libopencv_videoio.so.5.0存在:修改可执行文件的 RPATH 或 RUNPATH
//使用 patchelf 工具:
sudo apt-get install patchelf
patchelf --set-rpath /home/user/track1.10/build/lib ./track
2、代码运行
在build目录里,终端输入:
sudo ./track stop showImage 调颜色阈值
sudo ./track track 循迹
sudo ./track track showImage 蓝色限高杆
sudo ./track brown showImage 住户识别
sudo ./track brown green 绿色分岔路(全程代码 1)
sudo ./track violet red 红色分岔路(全程代码 2)















 1093
1093











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









