







链接:
https://github.com/ZzhYgwh/ids_ros_driver
一.安装
sudo dpkg -i ids-peak_2.11.0.0-178_amd64.deb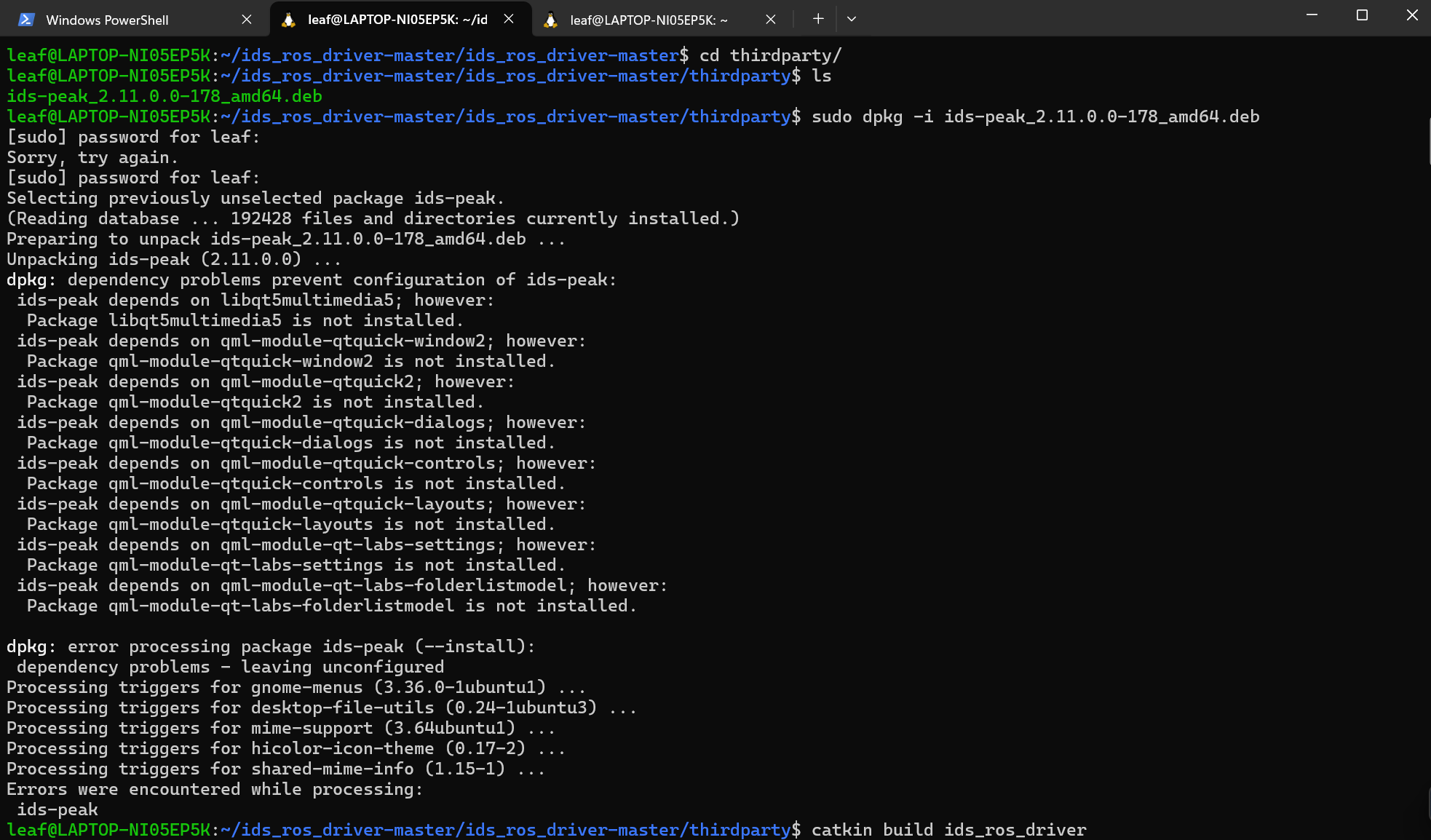
报错:
错误提示表明 ids-peak 软件包安装失败,因为缺少多个依赖包。你需要先安装这些缺失的依赖项,然后再尝试安装 ids-peak。以下是解决步骤:
sudo apt install -f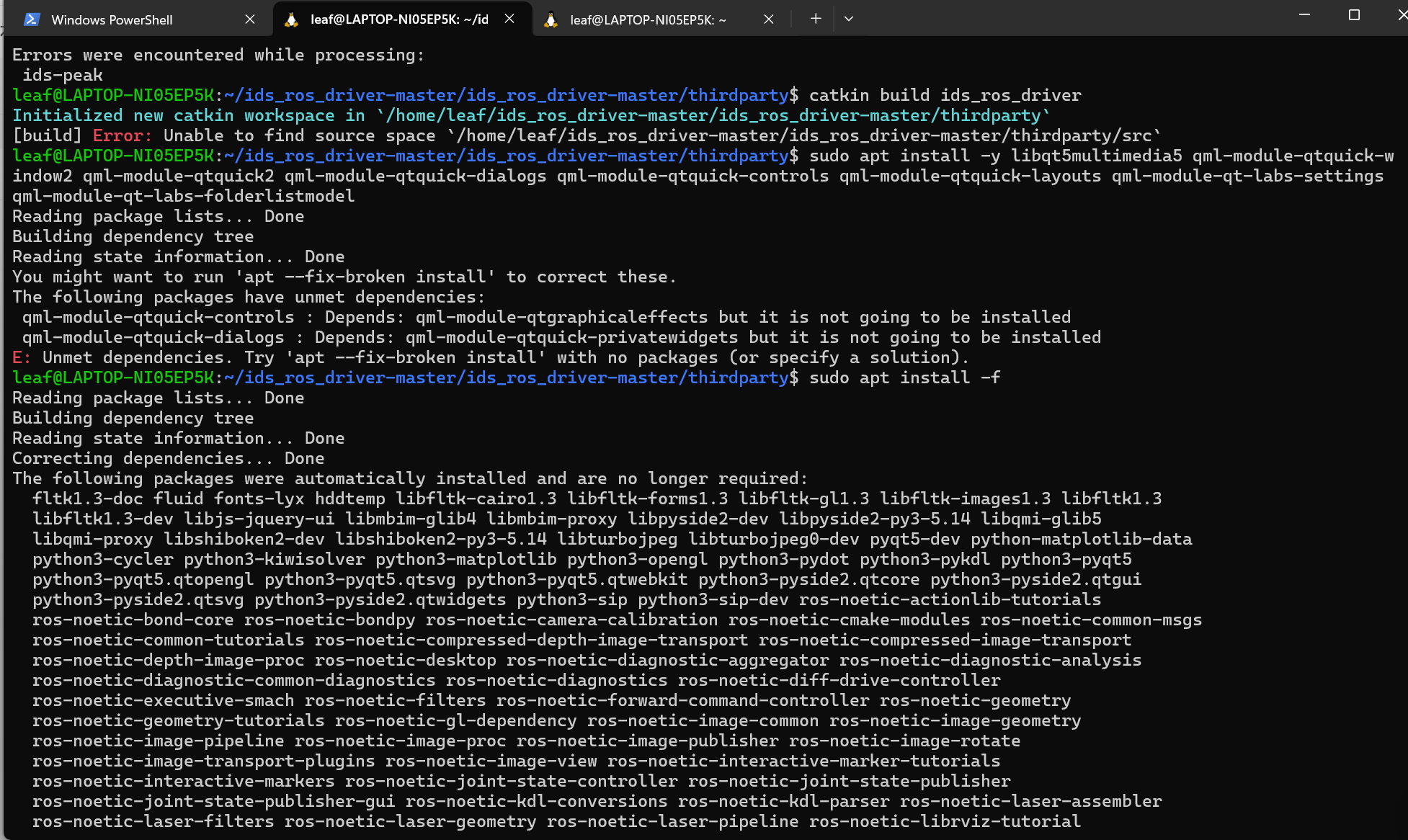
sudo apt install -y libqt5multimedia5 qml-module-qtquick-window2 qml-module-qtquick2 qml-module-qtquick-dialogs qml-module-qtquick-controls qml-module-qtquick-layouts qml-module-qt-labs-settings qml-module-qt-labs-folderlistmodel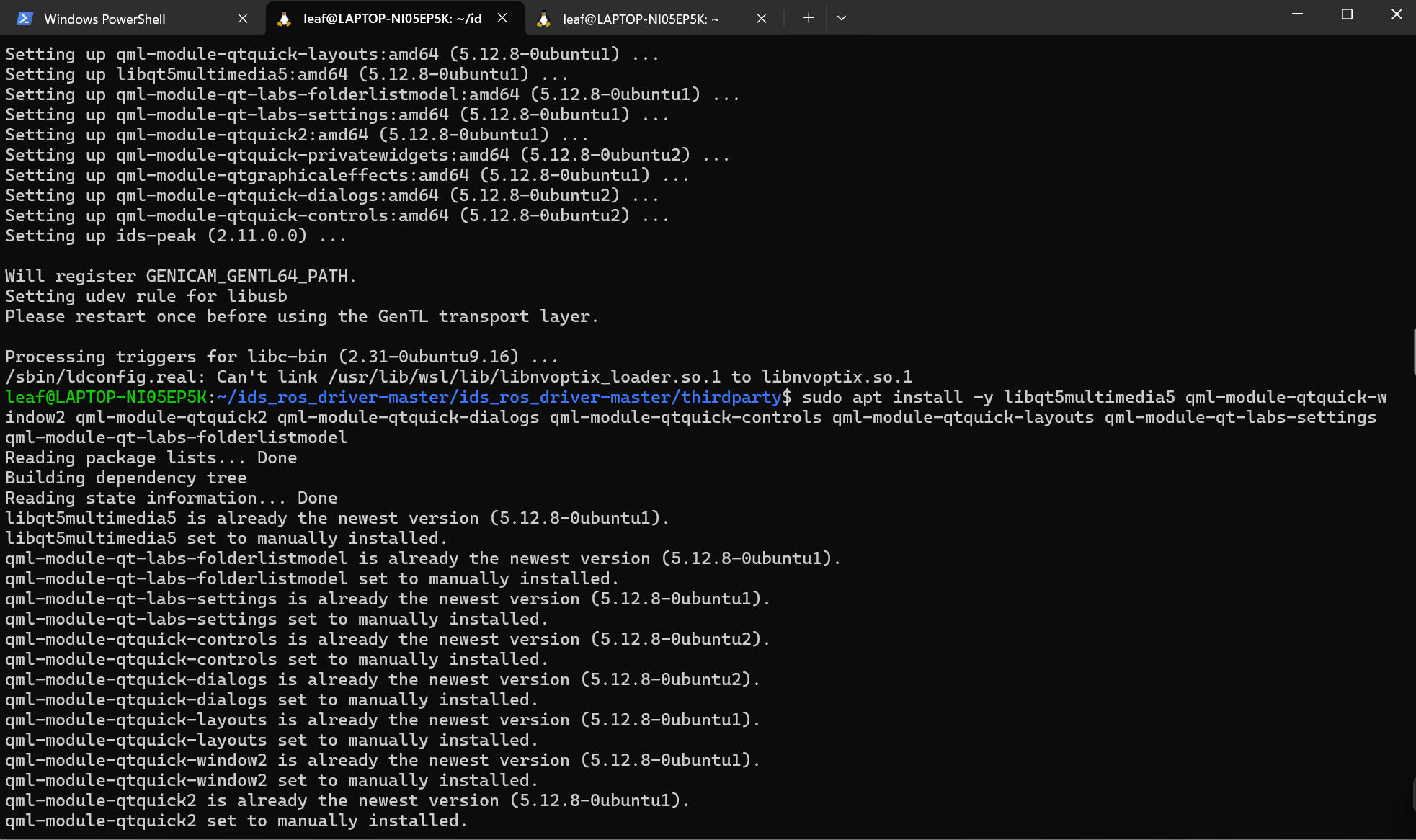
然后就安装好了
二.编译
下面编译,必须要放在src下编译,再把src/ids_ros_driver-master下的build删掉
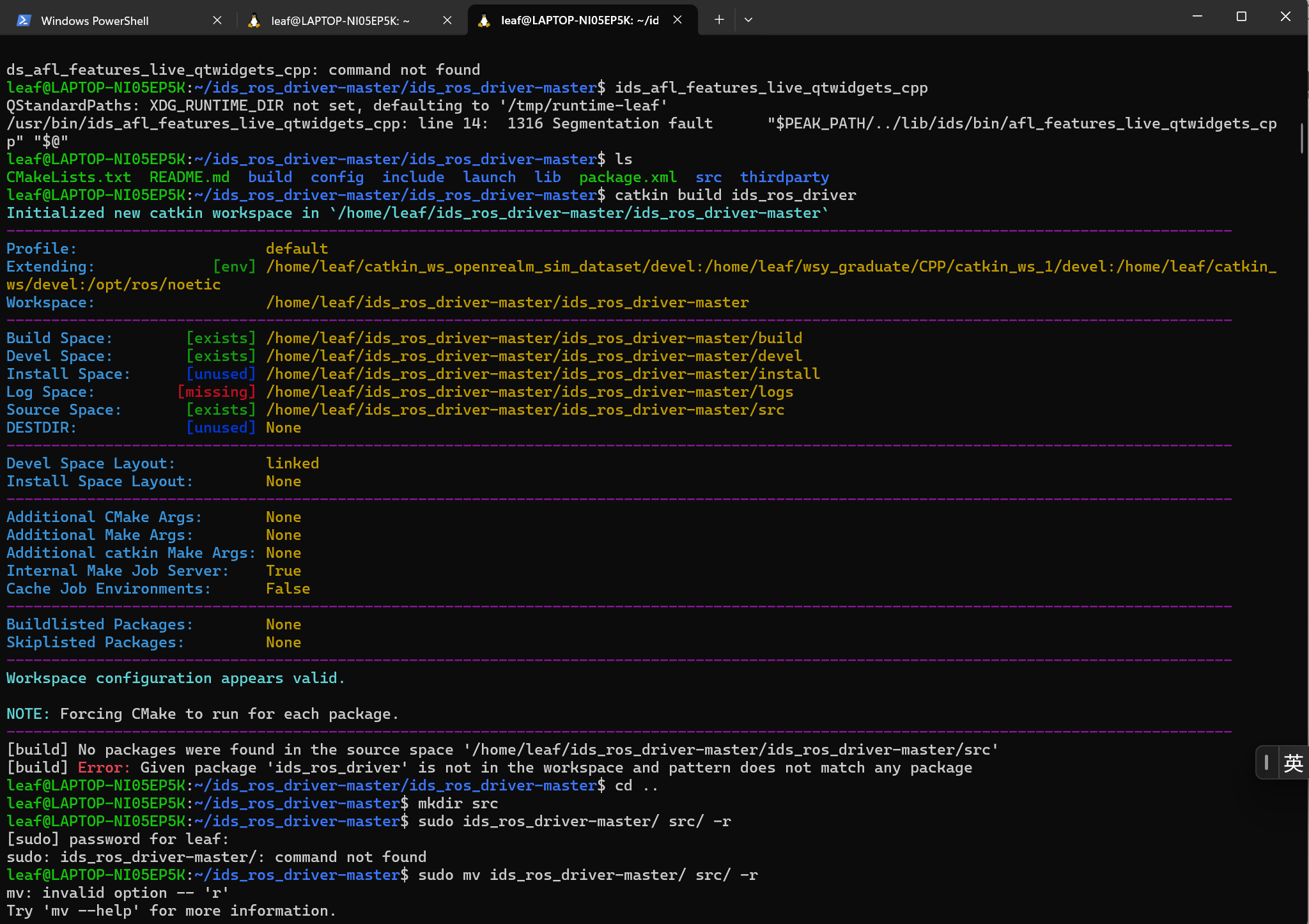
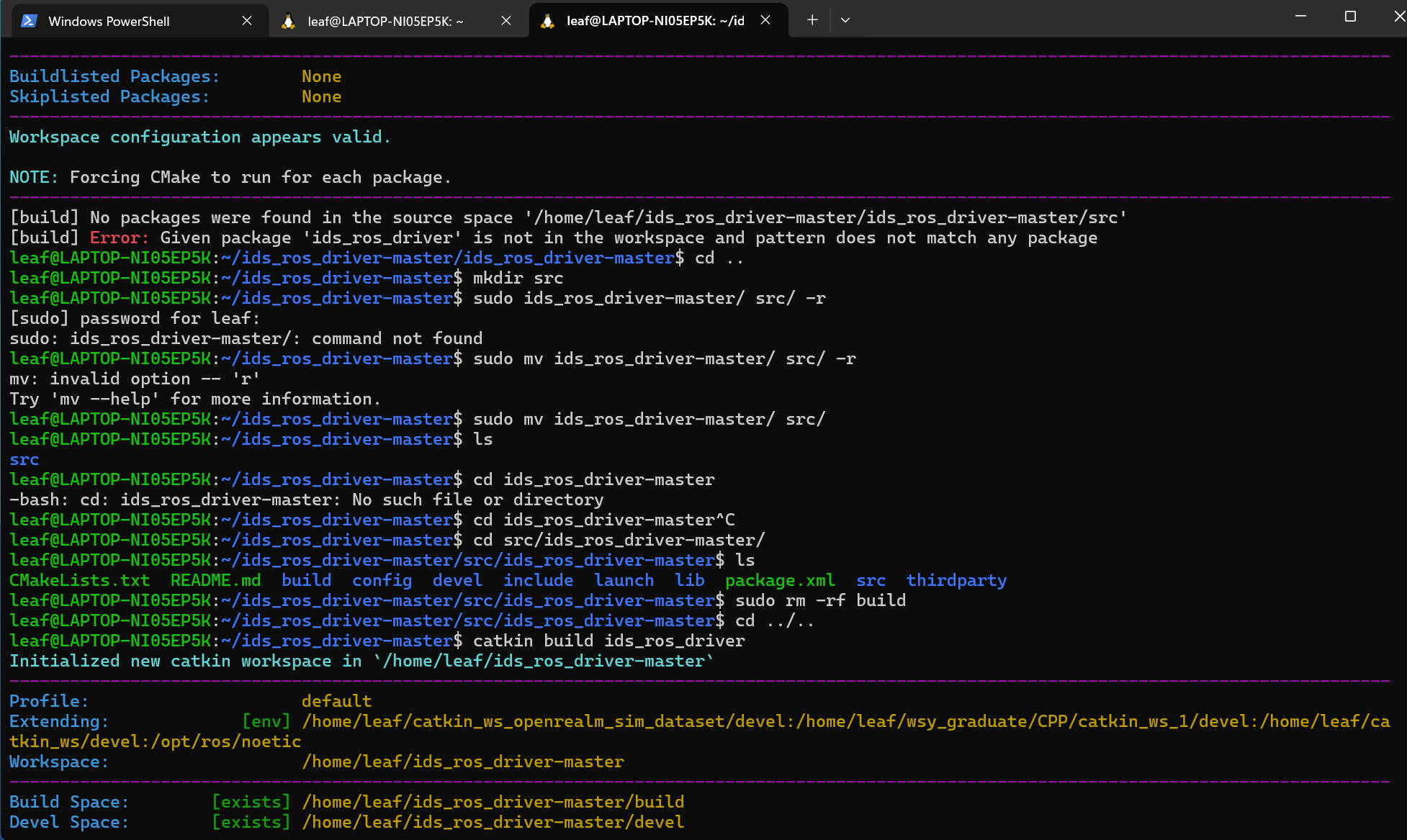
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master/ids_ros_driver-master$ cd ..
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ mkdir src
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ sudo mv ids_ros_driver-master/ src/
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ ls
src
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ cd src/ids_ros_driver-master/
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master/src/ids_ros_driver-master$ ls
CMakeLists.txt README.md build config devel include launch lib package.xml src thirdparty
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master/src/ids_ros_driver-master$ sudo rm -rf build
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master/src/ids_ros_driver-master$ cd ../..
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ catkin build ids_ros_driver报错:

________________________________________________________________________________________________________________________________________
Errors << ids_ros_driver:make /home/leaf/ids_ros_driver-master/logs/ids_ros_driver/build.make.000.log
In file included from /home/leaf/ids_ros_driver-master/src/ids_ros_driver-master/include/ids_ros_driver/IDS_Camera.cpp:3,
from /home/leaf/ids_ros_driver-master/src/ids_ros_driver-master/src/ids_ros_driver.cpp:4:
/home/leaf/ids_ros_driver-master/src/ids_ros_driver-master/include/ids_ros_driver/IDS_Camera.h:14:10: fatal error: peak/peak.hpp: No such file or directory
14 | #include <peak/peak.hpp>
| ^~~~~~~~~~~~~~~
compilation terminated.
make[2]: *** [CMakeFiles/ids_ros_driver_node.dir/build.make:63: CMakeFiles/ids_ros_driver_node.dir/src/ids_ros_driver.cpp.o] Error 1
make[1]: *** [CMakeFiles/Makefile2:185: CMakeFiles/ids_ros_driver_node.dir/all] Error 2
make: *** [Makefile:141: all] Error 2
cd /home/leaf/ids_ros_driver-master/build/ids_ros_driver; catkin build --get-env ids_ros_driver | catkin env -si /usr/bin/make --jobserver-auth=3,4; cd -
........................................................................................................................................
Failed << ids_ros_driver:make [ Exited with code 2 ]
Failed <<< ids_ros_driver [ 56.7 seconds ]
[build] Summary: 1 of 2 packages succeeded.
[build] Ignored: None.
[build] Warnings: None.
[build] Abandoned: None.
[build] Failed: 1 packages failed.
[build] Runtime: 1 minute and 38.6 seconds total.
[build] Note: Workspace packages have changed, please re-source setup files to use them.解决:
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ cd /usr/include/
leaf@LAPTOP-NI05EP5K:/usr/include$ cd ids_
ids_gentl_custom_extensions/ ids_peak_afl-1.6.0/ ids_peak_ipl-1.12.1/
ids_peak-1.8.0/ ids_peak_comfort_c-1.8.0/
leaf@LAPTOP-NI05EP5K:/usr/include$ cd ids_peak-1.8.0/
leaf@LAPTOP-NI05EP5K:/usr/include/ids_peak-1.8.0$ ls
peak
leaf@LAPTOP-NI05EP5K:/usr/include/ids_peak-1.8.0$ sudo cp -r peak ../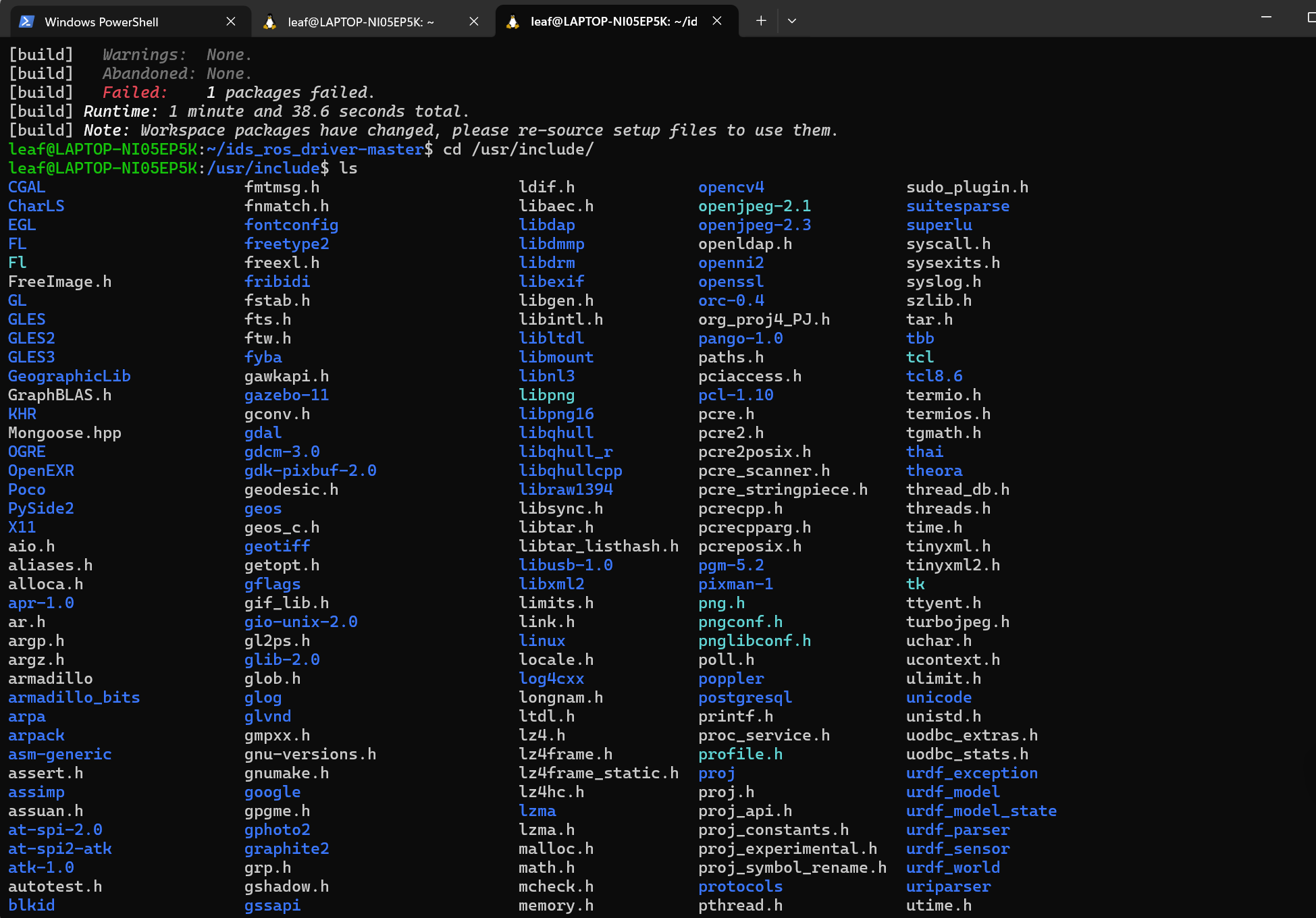
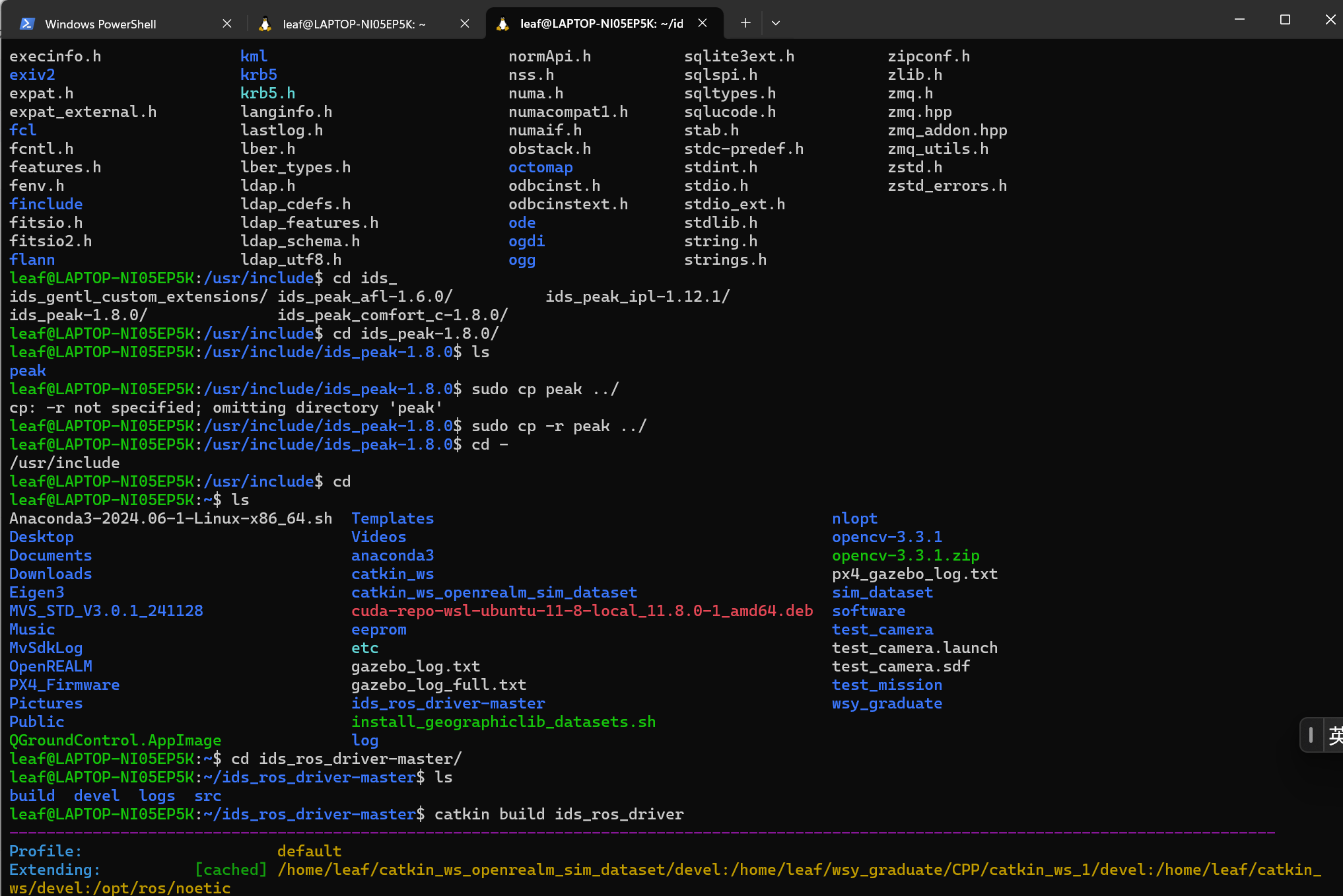
回去继续编译
leaf@LAPTOP-NI05EP5K:/usr/include$ cd
leaf@LAPTOP-NI05EP5K:~$ cd ids_ros_driver-master/
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ ls
build devel logs src
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ catkin build ids_ros_driver报错:
________________________________________________________________________________________________________________________________________
Errors << ids_ros_driver:make /home/leaf/ids_ros_driver-master/logs/ids_ros_driver/build.make.001.log
In file included from /home/leaf/ids_ros_driver-master/src/ids_ros_driver-master/include/ids_ros_driver/IDS_Camera.cpp:3,
from /home/leaf/ids_ros_driver-master/src/ids_ros_driver-master/src/ids_ros_driver.cpp:4:
/home/leaf/ids_ros_driver-master/src/ids_ros_driver-master/include/ids_ros_driver/IDS_Camera.h:15:10: fatal error: peak_ipl/peak_ipl.hpp: No such file or directory
15 | #include <peak_ipl/peak_ipl.hpp>
| ^~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
make[2]: *** [CMakeFiles/ids_ros_driver_node.dir/build.make:63: CMakeFiles/ids_ros_driver_node.dir/src/ids_ros_driver.cpp.o] Error 1
make[1]: *** [CMakeFiles/Makefile2:185: CMakeFiles/ids_ros_driver_node.dir/all] Error 2
make: *** [Makefile:141: all] Error 2
cd /home/leaf/ids_ros_driver-master/build/ids_ros_driver; catkin build --get-env ids_ros_driver | catkin env -si /usr/bin/make --jobserver-auth=3,4; cd -
........................................................................................................................................
Failed << ids_ros_driver:make [ Exited with code 2 ]
Failed <<< ids_ros_driver [ 0.4 seconds ]
[build] Summary: 0 of 1 packages succeeded.
[build] Ignored: None.
[build] Warnings: None.
[build] Abandoned: None.
[build] Failed: 1 packages failed.
[build] Runtime: 0.4 seconds total.解决:
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ cd /usr/include/peak/
backend/ converters/ dll_interface/ event/ interface/ port/ system/
buffer/ data_stream/ environment/ exception/ library/ producer_library/ thirdparty/
common/ device/ error_handling/ generic/ node_map/ reconnect/ version/
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ cd /usr/include/ids_
ids_gentl_custom_extensions/ ids_peak_afl-1.6.0/ ids_peak_ipl-1.12.1/
ids_peak-1.8.0/ ids_peak_comfort_c-1.8.0/
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ cd /usr/include/ids_peak_ipl-1.12.1/
leaf@LAPTOP-NI05EP5K:/usr/include/ids_peak_ipl-1.12.1$ ls
peak_ipl
leaf@LAPTOP-NI05EP5K:/usr/include/ids_peak_ipl-1.12.1$ sudo cp -r peak_ipl ../
回去编译:
leaf@LAPTOP-NI05EP5K:/usr/include/ids_peak_ipl-1.12.1$ cd -
/home/leaf/ids_ros_driver-master
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ catkin build ids_ros_driver编译成功:
三.运行
运行相机
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ source devel/setup.bash
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ roslaunch ids_ros_driver ids_
ids_mono.launch ids_stereo.launch
leaf@LAPTOP-NI05EP5K:~/ids_ros_driver-master$ roslaunch ids_ros_driver ids_mono.launch
成功运行:
leaf@leaves:~/ids_ros_driver-master$ source ~/ids_ros_driver-master/devel/setup.bash
leaf@leaves:~/ids_ros_driver-master$ roslaunch ids_ros_driver ids_mono.launch
四.查看相机话题和图片
leaf@leaves:~/ids_ros_driver-master$ rostopic list
/IDS/left_camera/image_raw
/IDS/left_camera/image_raw/compressed
/IDS/left_camera/image_raw/compressed/parameter_descriptions
/IDS/left_camera/image_raw/compressed/parameter_updates
/rosout
/rosout_agg
1.查看图片
rosrun image_view image_view image:=/IDS/left_camera/image_raw2.使用rviz查看
rosrun rviz rviz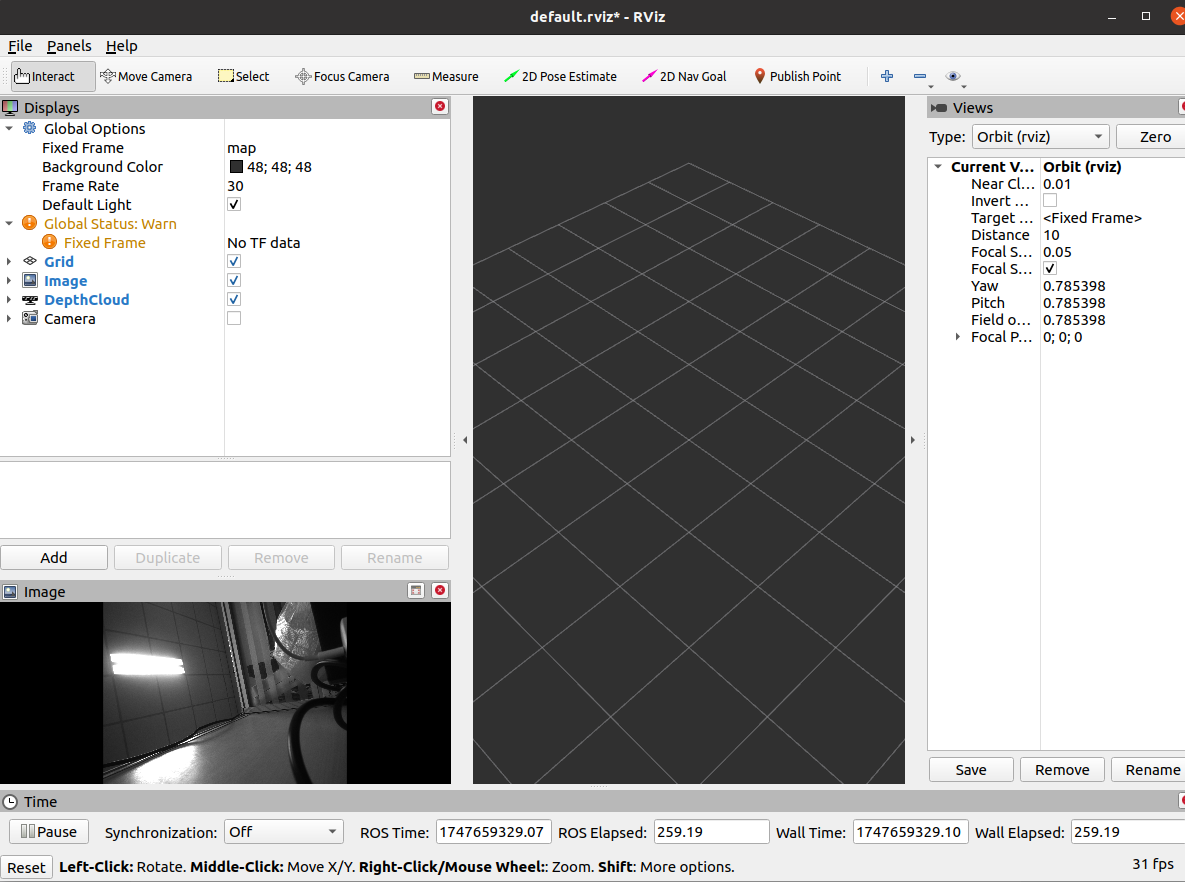




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











