







1.什么叫做相对定向?
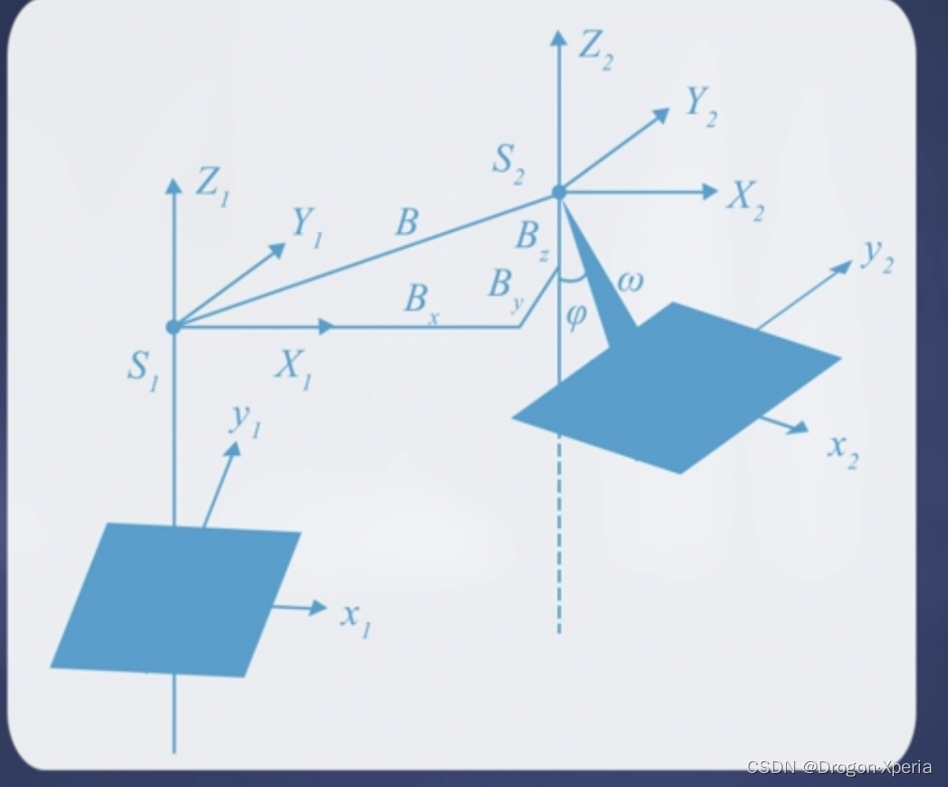
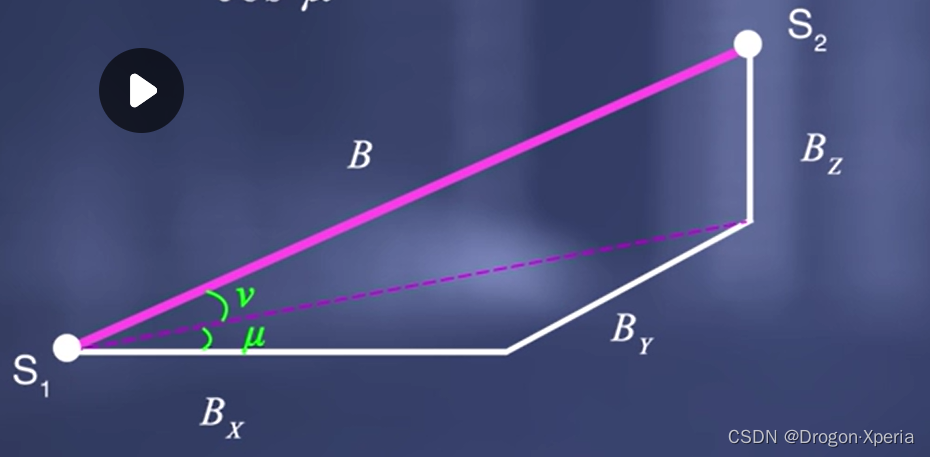
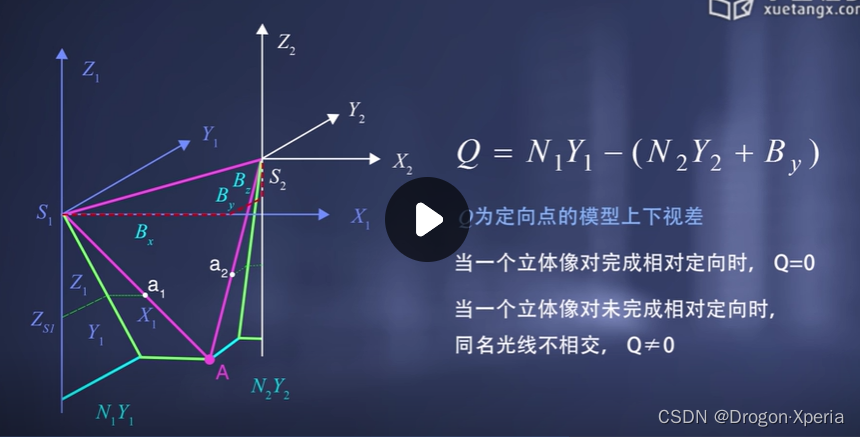
假设将左像空间坐标系作为像空间辅助坐标系,并且与物方空间坐标系重合,那么左像的六个外方位元素就是0,而右像的外方位元素就变成了右像空间坐标系相对于左像空间坐标系的相对位置和姿态参数,也就是摄影基线的三个分量还有右像的三个角元素,如下图所示
2.那么相对定向元素是什么
立体像对两个像空间坐标系之间的相对位置和运行姿态参数,分别是
三个分量:摄影基线相对于像空间辅助坐标系的三个分量Bx By Bz
三个外方位元素:右像空间坐标系相对于像空间辅助坐标系的三个角元素,如上图所示右侧标注的三个角
3.相对定向的原理
共面条件方程:理论上,同名光线相交于同一核面内,也就是三条线的矢量混合积等于0
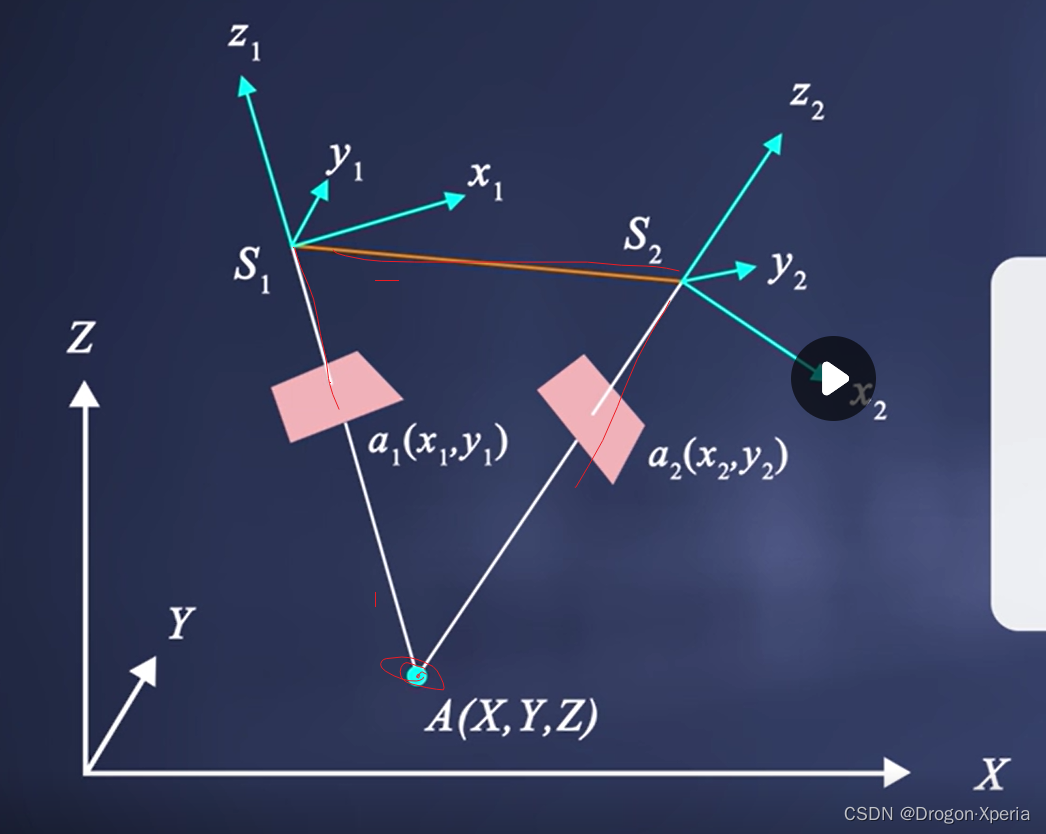
4.根据上面的共面条件方程可得,我们只要能在三个线上找到三个点,那么我们使用共面条件方程
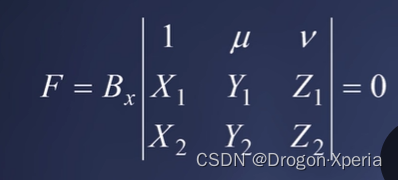
此时,共面条件方程就可以转换为如下形式
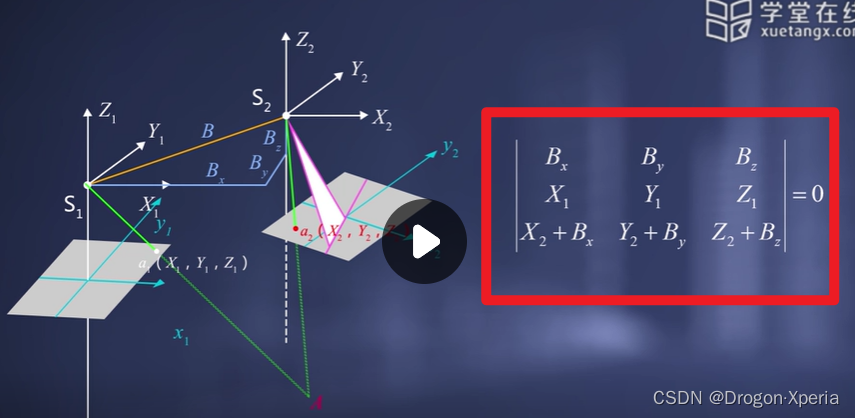
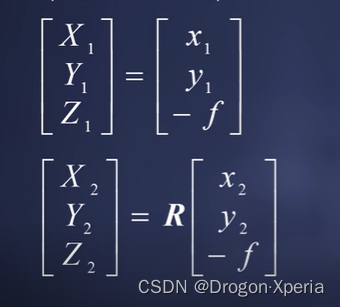
公式理解:第一行为摄影基线的三个分量,也就是右像坐标系的原点在像空间辅助坐标系的坐标
第二行为左像点在左面坐标系的坐标(左边线上的点);第三行是右像点在像空间辅助坐标系的坐标(右边线上的点)
然后我们还可以这个行列式灵活变换一下
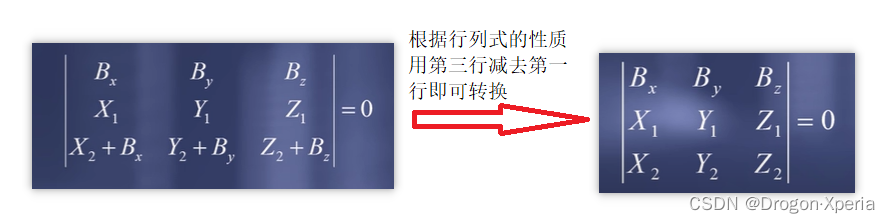
但是在化到这一步依然要继续转换下去
左右像点坐标量测结果可以表示成如下形式
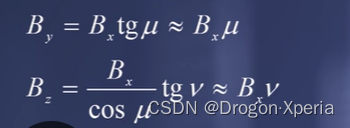
摄影基线的三个分量让我们单拿出来讨论一下
于是,我们就可以把By Bz表示成如下形式
5.所以最终共面条件方程可以转换为一个非线性方程的形式
但是,根据我们之前进行后方交会的时候我们可以知道,想要得到相对定向结果,我们首先要对这个式子进行线性化也就是进行泰勒级数展开,所以展开结果就是

再根据之前求偏导数的方法将五个偏导数求出

我们可以看见上式的括号里的系数与点投影系数有相似之处。所以我们决定等式两边同时除以Z1X2-X1Z2
等式就变成了下面的形式,并且最重要的一部分是最后一个式子

6.上式的最后一个究竟有什么意思呢?
我们首先要明白一个道理,就是定向点的模型上下视差,就像我们人眼去看一个物体的时候,极大可能看见的事物不是从同一个点发出的光线而是在那个点的附近
所以其实我们进行相对定向就是为了让同名光线相交于同一物点
只要一个立体像对完成了相对定向,那么定向点的模型上下视差就为0,也即是Q=0
那么我们之前说的那个式子其实就是视差,就是要利用视差等于0来解求
7.所以我们将Q变换成下列的误差方程
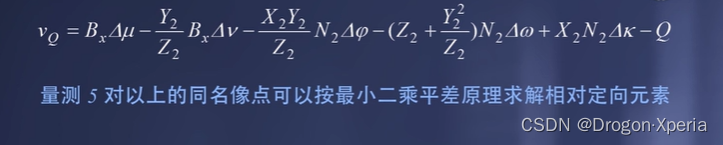
所以我们需要量测至少五对同名像点才可以按照最小二乘平差原理求解相对定向元素
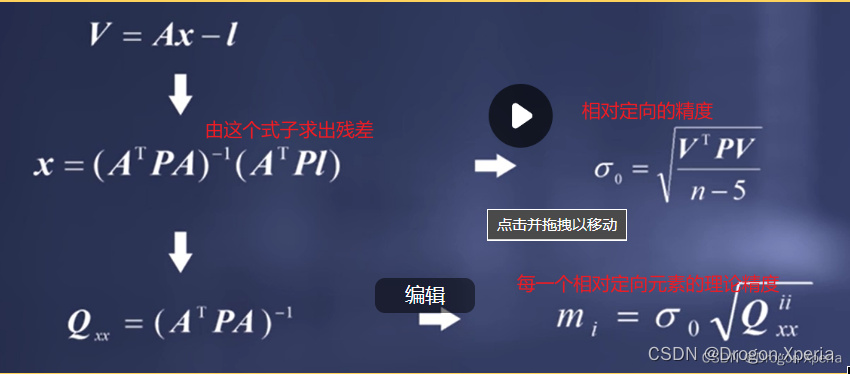
8.知道了这些数据之后我们就可以列出相应的误差方程和法方程
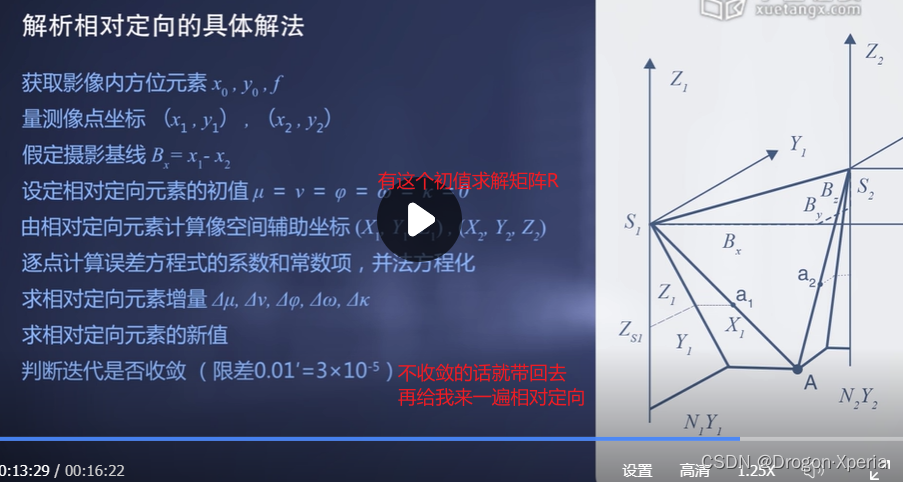
9.总结解析相对定向的步骤
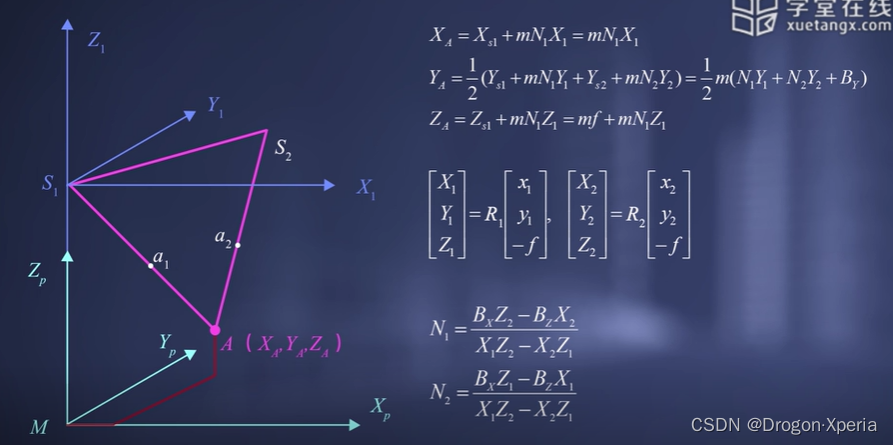
10.我们经过相对定向之后,同名光线就相交于物点了,那么如何求解物点的模型坐标
通常我们可以将像空间辅助坐标系按照摄影比例尺平移到地面上,建立模型的摄影测量坐标系,用作为表达物点模型坐标的物方空间坐标系
注意: 这里求解物点坐标唯一要注意的地方是点投影系数前记得乘上摄影比例尺的分母

















 4479
4479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









