






一、核心贡献
-
联合优化去模糊与重建:
通过小型MLP动态调整3D高斯的协方差矩阵(形状参数),直接在3D空间建模模糊效应(如运动模糊和焦外模糊),训练时模拟模糊,推理时仅用原始高斯渲染清晰图像。 -
稀疏点云补偿技术:
-
KNN插值补点:在训练过程中为稀疏区域添加带有效颜色特征的新点。
-
深度自适应剪枝:根据深度调整高斯剪枝阈值,保留远景更多高斯点。
-
-
实时性保障:
MLP仅在训练时激活,推理阶段与原始3D-GS完全一致,因此渲染速度仍能保持800 FPS以上。
二、框架图解释
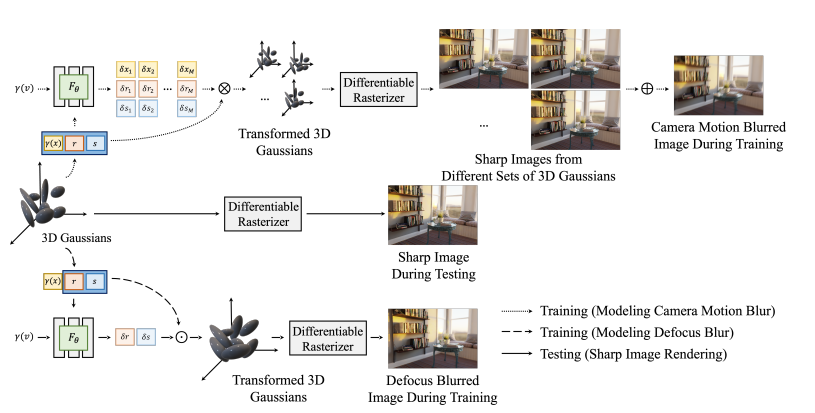
结合下图解释方法流程:图片展示了基于3D高斯泼溅(3DGS)的去模糊框架工作流程,具体步骤如下:
1. 3D高斯参数定义
每个3D高斯由以下参数唯一表征(对应图中左侧输入):
位置 (x):高斯的3D空间坐标。
四元数(r):控制高斯的旋转,与缩放 (s) 共同构成协方差矩阵 (∑(r,s))。
缩放 (s):决定高斯的形状尺寸(各向异性缩放)。
球谐函数(SH):编码视角相关的颜色外观(图中未显式标注,但隐含在光栅化过程中)。
2. 输入数据
相机位姿:通过SfM(运动恢复结构)从多视角模糊图像中估计。
点云:SfM生成的稀疏点云作为初始3D高斯分布的基础。
模糊图像:训练用的输入图像,可能包含散焦模糊或相机运动模糊。
3. MLP驱动的模糊建模
通过轻量MLP动态调整高斯参数,分为两类模糊处理:
(1) 散焦模糊建模(虚线箭头路径)
输入:第(j)个高斯的参数 (xj, rj, sj) 经过位置编码γ (·) 后输入MLP。
输出:MLP预测缩放因子 (δ rj) 和 (δ sj)。
参数更新:

光栅化:更新后的高斯输入分块光栅化器,生成散焦模糊图像。
(2) 相机运动模糊建模(点线箭头路径)
输入:同散焦模糊,但MLP额外预测位置偏移 (δ xj(i))。
输出:对第(j)个高斯生成(M)组参数 {δ xj(i), δ rj(i), δ sj(i)}i=1M,每组对应相机曝光期间的一个时刻。
参数更新:

多帧平均:光栅化器生成M张清晰图像后取平均(⊕操作),模拟相机运动模糊效果。
4. 推理阶段(实线箭头路径)
仅使用原始参数:推理时MLP不激活,直接使用未调整的原始高斯参数 {xj, rj, sj} 进行光栅化,生成去模糊后的清晰图像。
实时性保障:由于无需MLP计算,渲染速度与原始3DGS一致(>800 FPS)。
5. 关键符号解读
γ (·):位置编码,将低维坐标映射到高维空间以增强MLP表达能力。
⊙:逐元素相乘,用于局部调整高斯参数。
⊕:平均操作,用于融合多帧运动模糊结果。
⊗:复合操作符,统一表示参数更新过程
![]()
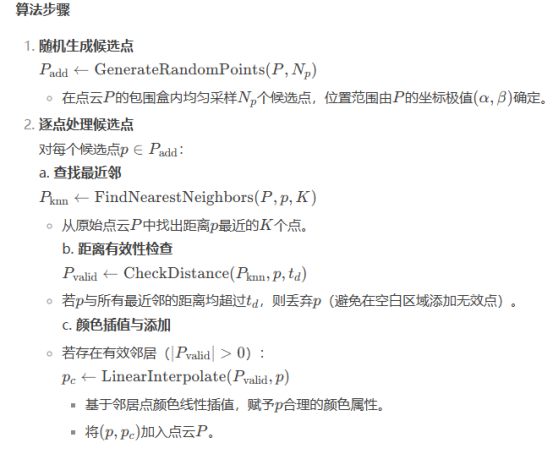
三、点补偿算法解释
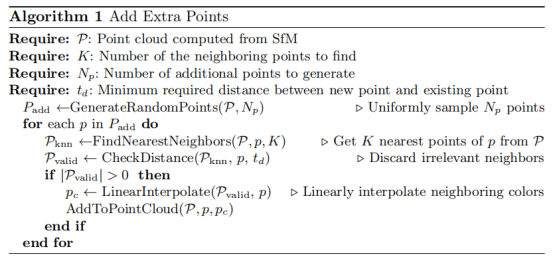
针对模糊输入图像导致SfM(运动恢复结构)生成的点云P过于稀疏的问题,本算法通过K近邻插值在稀疏区域添加新点,提升3D高斯重建的完整性和细节质量。
输入参数:
P:SfM生成的初始稀疏点云。
K:为每个新增点寻找的最近邻点数(默认K=4)。
Np:需生成的新增点数(根据场景范围自适应计算,上限20万)。
td:新增点与最近邻点的最小距离阈值(默认td=2),用于过滤无效点。
关键设计动机:
稀疏区域补偿:模糊图像导致SfM特征点提取失败,尤其在景深较大的区域(如远景)。通过插值增补点,确保3D高斯覆盖完整场景。
颜色一致性:新点颜色通过邻近点插值获得,避免随机初始化引入噪声,保持材质连续性。
距离过滤:阈值td防止在无真实表面的区域(如纯背景)添加点,控制点云密度合理性。
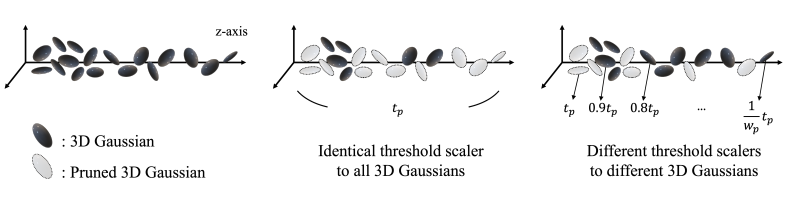
深度自适应剪枝效果
左:原始高斯;中:传统剪枝;右:深度自适应剪枝(远景保留更多点)
四、结果展示
1. 定量对比
关于真实离焦模糊数据集的定量测试结果如下:
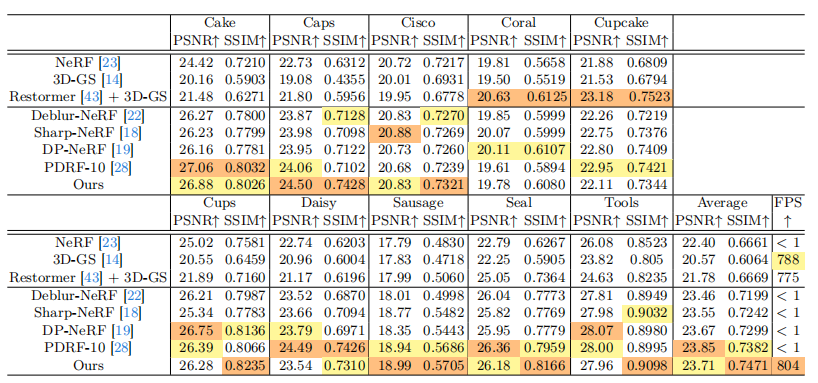
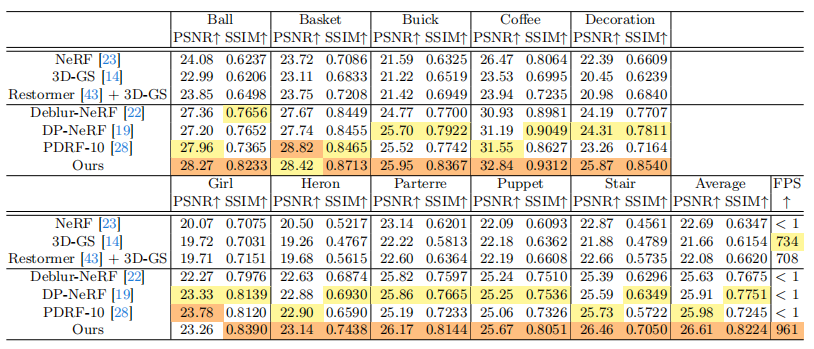
在PSNR、SSIM和FPS下测试的真实相机运动模糊数据集的定量测试结果如下:
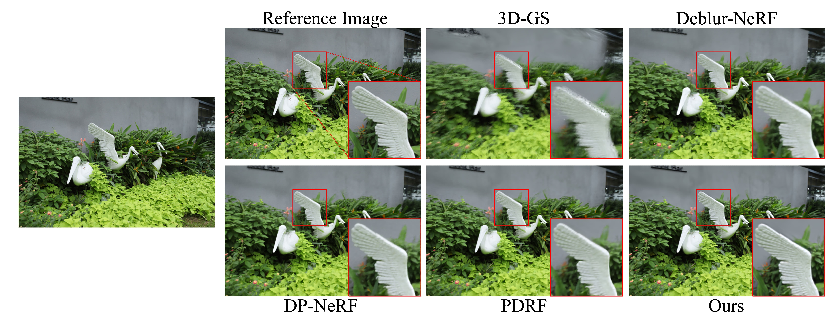
2. 定性对比
真实相机运动模糊数据集的定性结果如下:
更多测试结果如下所示:
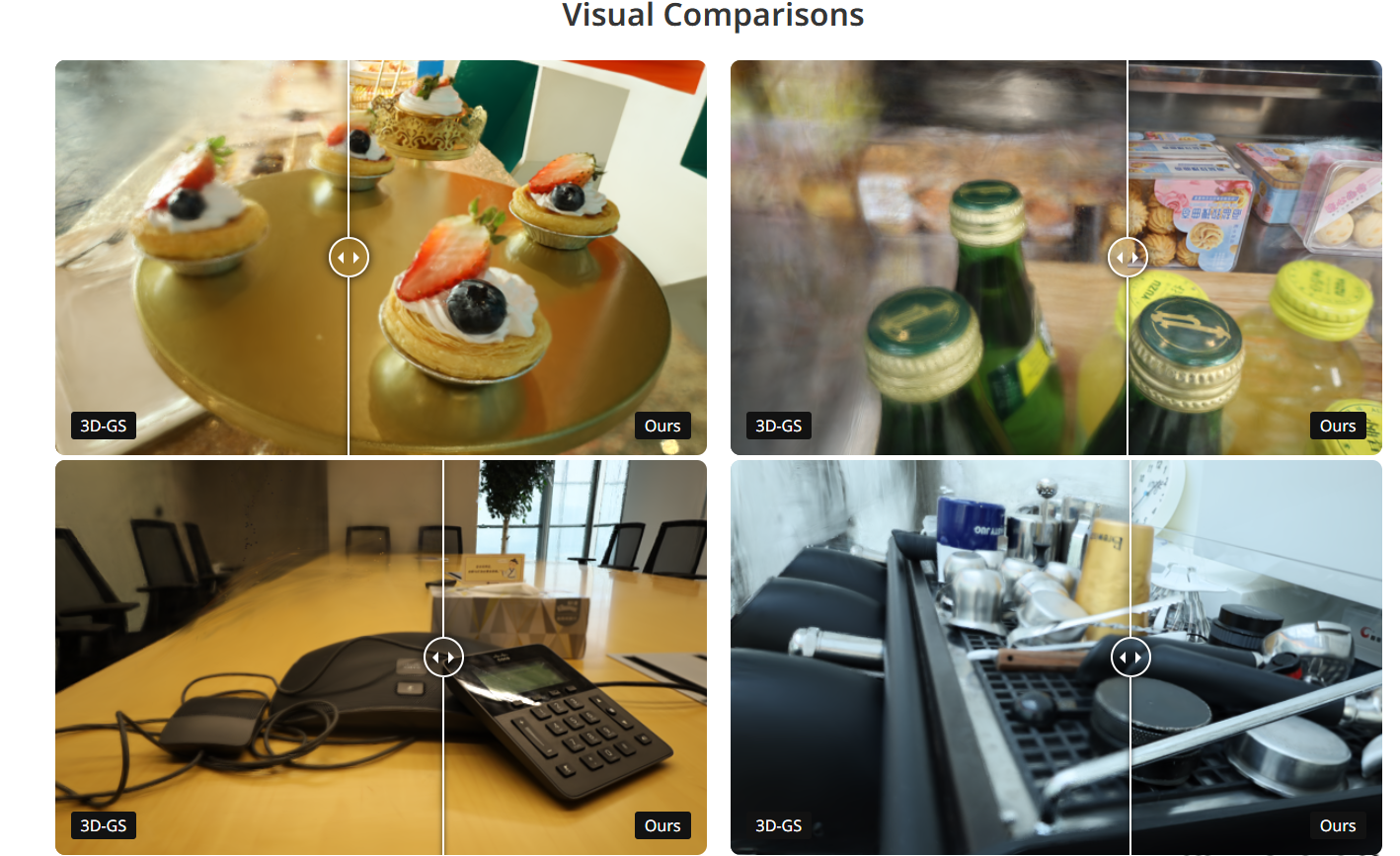
链接:https://benhenryl.github.io/Deblurring-3D-Gaussian-Splatting/tting
五、总结讨论
该文章提出了一种突破传统流程的3D场景重建方法,直接在3D高斯喷溅(Gaussian Splatting)表示中联合优化去模糊与重建,而非先处理2D图像再重建3D场景。利用点云的高斯喷溅(Gaussian Splatting)技术,将场景表示为具有位置、颜色、透明度和形状参数的3D高斯核。同时在模型中学习模糊核,实现场景的同时去模糊和三维重建。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









