






西电大二微控制项目个人作业软件部分总结心得。
一. 所需软件:
Proteus、Keil5、VSPD、串口调试助手(XCOM)
二.Proteus部分
详细步骤可以参考:
proteus创建工程、芯片选择、元件配置操作方法
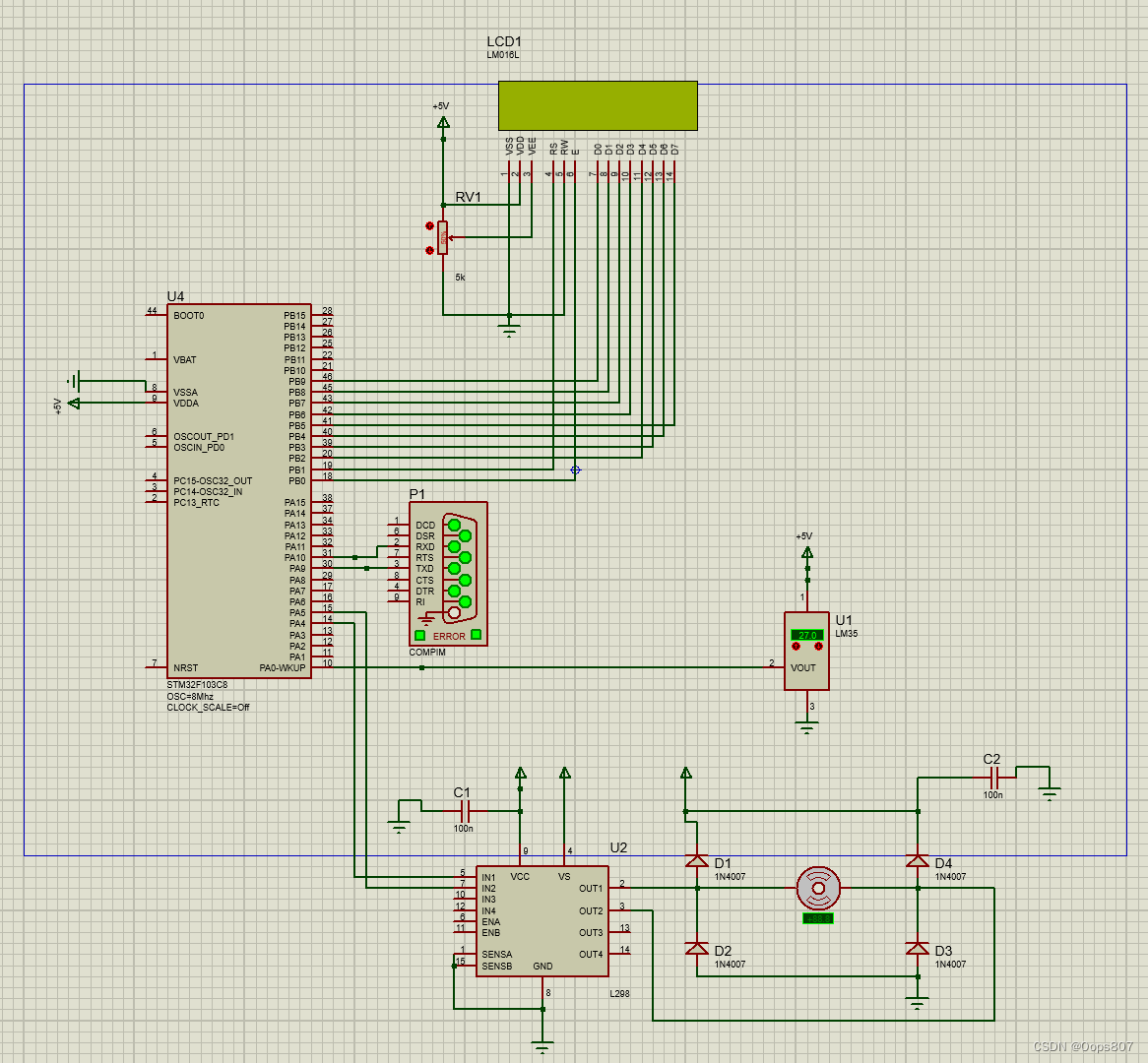
1.接线图
所需元器件:
a)整体图
b)LCD部分
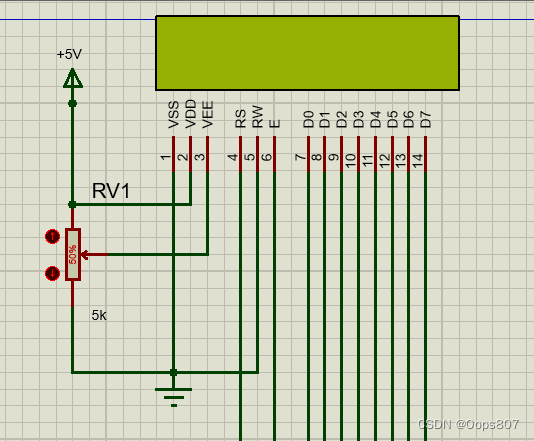
注.红色的是可变电阻,器件名为POT-HG
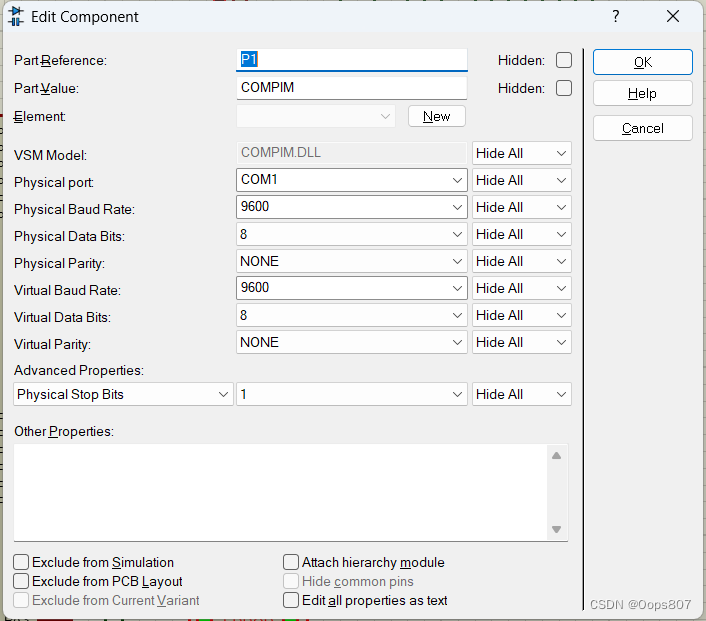
c)串口部分
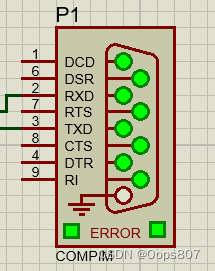
注.与单片机连接时需将虚拟串口的RX与单片机的RX连接(TX同理)
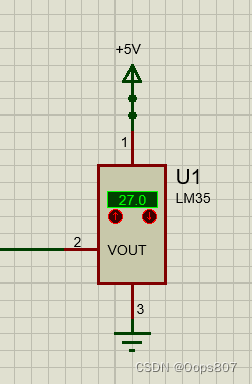
d)温度传感器部分
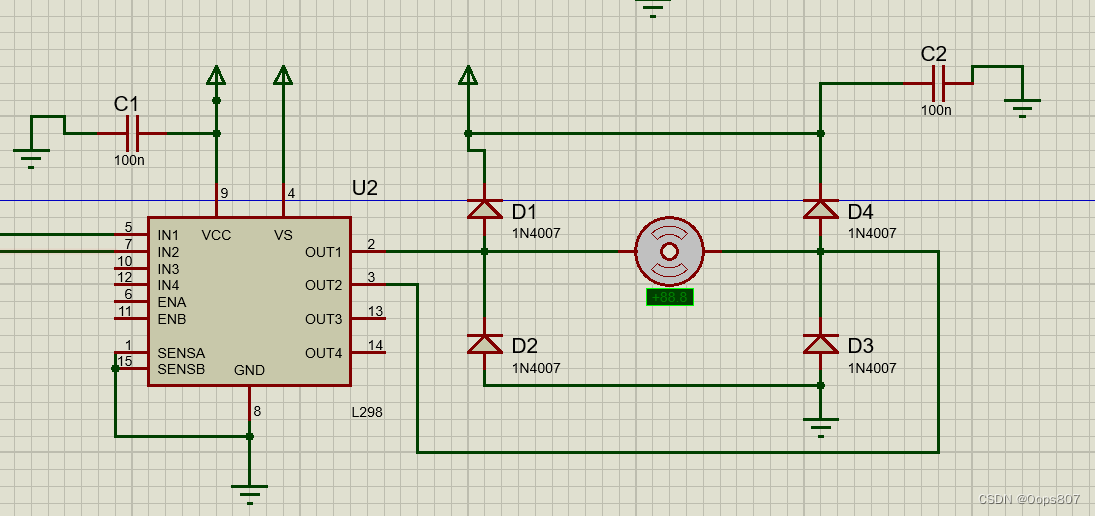
e)电机部分
f)单片机部分
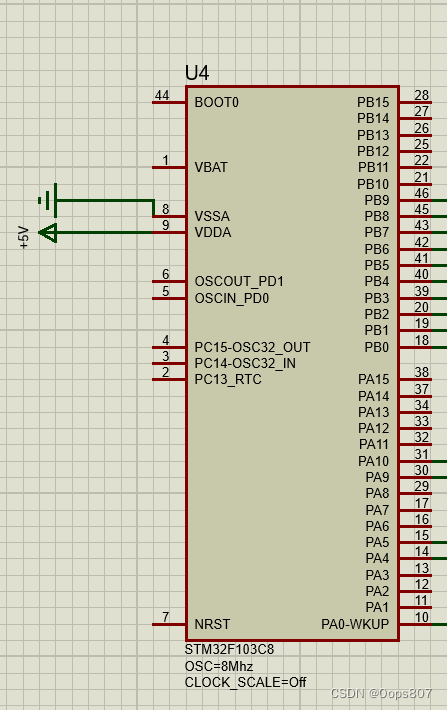
本次仿真选用STM32F103C8T6
2.各项参数配置
a)电源均配置为+5V,注意接地
注. 单片机上的VSSA要接地并且VDDA要接+5V(给ADC提供参考电压,否则ADC读取数据会异常)
b)双击单片机配置主频为8Mhz,CLOCK_SCALE为Off
设置晶振8MHZ一定不能省略
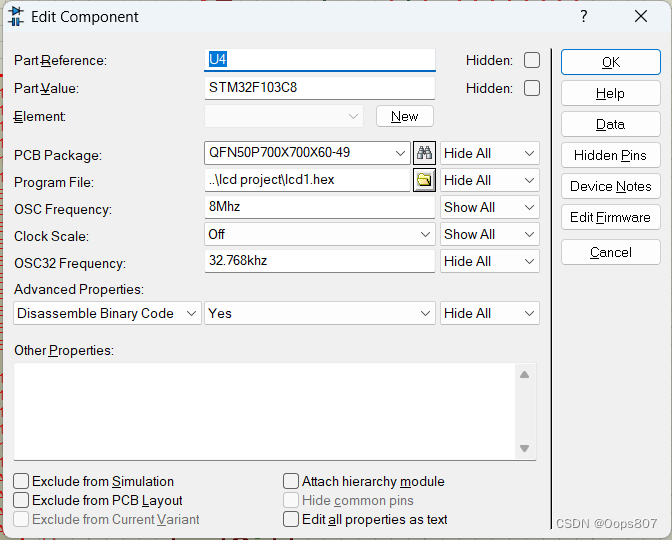
注.主频太低会导致LCD显示数据不全
c)虚拟串口配置如下
三.Keil部分
Keil部分需具备STM32标准库的知识,如果不具备相关知识可以使用江协科技的程序源码。
Keil工程需要引入头文件,为了方便,此次直接使用源码进行总结。
源码地址:https://jiangxiekeji.com/download.html
点击STM32资料下载程序源码,选择9-4收发数据包。
如果使用自己的工程则需要在新建.c和.h文件时选择好路径(例程中为Hardware路径)
并将代码复制粘贴到文件中(各个模块需分别新建文件)
1.LCD部分(由于江科大例程并未提供LCD驱动所以自己手搓了LCD部分的代码)
管脚声明:
#define LCD_E GPIO_Pin_0
#define LCD_RS GPIO_Pin_1
#define LCD_D0 GPIO_Pin_9
#define LCD_D1 GPIO_Pin_8
#define LCD_D2 GPIO_Pin_7
#define LCD_D3 GPIO_Pin_6
#define LCD_D4 GPIO_Pin_2
#define LCD_D5 GPIO_Pin_3
#define LCD_D6 GPIO_Pin_4
#define LCD_D7 GPIO_Pin_5
.c文件
#include "stm32f10x.h"
#include "LCD_1.H"
#include "Delay.h"
/*
LCD_E GPIO_PIN_0
LCD_RS GPIO_PIN_1
LCD_D0 GPIO_PIN_9
LCD_D1 GPIO_PIN_8
LCD_D2 GPIO_PIN_7
LCD_D3 GPIO_PIN_6
LCD_D4 GPIO_PIN_2
LCD_D5 GPIO_PIN_3
LCD_D6 GPIO_PIN_4
LCD_D7 GPIO_PIN_5
*/
#define LCD_E GPIO_Pin_0
#define LCD_RS GPIO_Pin_1
#define LCD_D0 GPIO_Pin_9
#define LCD_D1 GPIO_Pin_8
#define LCD_D2 GPIO_Pin_7
#define LCD_D3 GPIO_Pin_6
#define LCD_D4 GPIO_Pin_2
#define LCD_D5 GPIO_Pin_3
#define LCD_D6 GPIO_Pin_4
#define LCD_D7 GPIO_Pin_5
void LCD_init(){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = LCD_E | LCD_RS | LCD_D4 | LCD_D5 | LCD_D6 | LCD_D7 | LCD_D3 | LCD_D2 | LCD_D1 | LCD_D0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void Lcd_ready(){
Lcd_write_cmd(0x38);
Lcd_write_cmd(0x0C);//开显不显示光标
Lcd_write_cmd(0x06);//写一个指针加一
Lcd_clear();//清屏
Lcd_write_cmd(0x80);//设置数据指针起点
}
void Lcd_write(uint8_t data){
GPIO_WriteBit(GPIOB, LCD_D7 , (BitAction)((data & 0x80) >>7));//取出数据第8位并向右移7位
GPIO_WriteBit(GPIOB, LCD_D6 , (BitAction)((data & 0x40) >>6));//其余同理
GPIO_WriteBit(GPIOB, LCD_D5 , (BitAction)((data & 0x20) >>5));
GPIO_WriteBit(GPIOB, LCD_D4 , (BitAction)((data & 0x10) >>4));
GPIO_WriteBit(GPIOB, LCD_D3 , (BitAction)((data & 0x08) >>3));
GPIO_WriteBit(GPIOB, LCD_D2 , (BitAction)((data & 0x04) >>2));
GPIO_WriteBit(GPIOB, LCD_D1 , (BitAction)((data & 0x02) >>1));
GPIO_WriteBit(GPIOB, LCD_D0 , (BitAction)((data & 0x01)));
}
void Lcd_clear(){
Lcd_write_cmd(0x01);
}
void Lcd_set_coord(uint8_t x, uint8_t y){
uint8_t x_show;
if(y==0){
x_show = x;//如果是第一行则x坐标为x
}else{
x_show = x + 0x40;//如果为第二行则x坐标需要加0x40
}
Lcd_write_cmd(x_show | 0x80);//取得最终坐标
}
void Lcd_write_cmd(uint8_t cmd){
GPIO_ResetBits(GPIOB,LCD_RS);//RS置低电平
Lcd_write(cmd);//写指令
Delay_us(5);
GPIO_SetBits(GPIOB,LCD_E);//使能
Delay_us(5);
GPIO_ResetBits(GPIOB,LCD_E);//失能
Delay_ms(5);
}
void Lcd_write_data(uint8_t data){
GPIO_SetBits(GPIOB,LCD_RS);//RS置高电平
Lcd_write(data);//写数据
Delay_us(5);
GPIO_SetBits(GPIOB, LCD_E);
Delay_us(5);
GPIO_ResetBits(GPIOB, LCD_E);
Delay_ms(5);
}
void Lcd_write_ch(uint8_t x, uint8_t y, uint8_t ch){
Lcd_set_coord(x, y);//写坐标
Lcd_write_data(ch);//在坐标上写入字符
}
/**
* 函 数:LCD显示字符
* 参 数:x:列数,y:行数,str:要显示的字符(可定义数组后填入数组)
* 返 回 值:无
*/
void Lcd_write_str(uint8_t x, uint8_t y, uint8_t *str){
Lcd_set_coord(x, y);//写入坐标
while(*str != '\0'){
Lcd_write_ch(x , y, *str);//取出数组中的首地址,数组本质是指针
x += 1;//每写一个字符x坐标右移一位
str++;//字符指针右移一位
}
}
uint32_t Lcd_Pow(uint32_t x, uint32_t y)
{
uint32_t Result = 1;
while (y--)
{
Result *= x;
}
return Result;
}
/**
* 函 数:LCD显示数字
* 参 数:x:列数,y:行数,num:要显示的数字,Length:数字长度
* 返 回 值:无
*/
void Lcd_write_num(uint8_t x, uint8_t y, uint32_t num, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
Lcd_write_ch(x + i, y, num/ Lcd_Pow(10, Length - i - 1) % 10 + '0');
}
}
.h文件
#ifndef __LCD_1_H
#define __LCD_1_H
#define LCD_E GPIO_Pin_0
#define LCD_RS GPIO_Pin_1
#define LCD_D0 GPIO_Pin_9
#define LCD_D1 GPIO_Pin_8
#define LCD_D2 GPIO_Pin_7
#define LCD_D3 GPIO_Pin_6
#define LCD_D4 GPIO_Pin_2
#define LCD_D5 GPIO_Pin_3
#define LCD_D6 GPIO_Pin_4
#define LCD_D7 GPIO_Pin_5
void LCD_init(void);
void Lcd_ready(void);
void Lcd_write(uint8_t data);
void Lcd_clear(void);
void Lcd_set_coord(uint8_t x, uint8_t y);
void Lcd_write_cmd(uint8_t cmd);
void Lcd_write_data(uint8_t data);
void Lcd_write_ch(uint8_t x, uint8_t y, uint8_t ch);
void Lcd_write_str(uint8_t x, uint8_t y, uint8_t *str);
void Lcd_write_num(uint8_t x, uint8_t y, uint32_t num, uint8_t Length);
#endif
2.串口部分
管脚声明:
TX为PA9,RX为PA10
.c文件
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
char Serial_RxPacket[100]; //定义接收数据包数组,数据包格式"@MSG\r\n"
uint8_t Serial_RxFlag; //定义接收数据包标志位
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*中断输出配置*/
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
}
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字
}
}
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
/**
* 函 数:USART1中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0; //定义表示当前状态机状态的静态变量
static uint8_t pRxPacket = 0; //定义表示当前接收数据位置的静态变量
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断
{
uint8_t RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量
/*使用状态机的思路,依次处理数据包的不同部分*/
/*当前状态为0,接收数据包包头*/
if (RxState == 0)
{
if (RxData == '@' && Serial_RxFlag == 0) //如果数据确实是包头,并且上一个数据包已处理完毕
{
RxState = 1; //置下一个状态
pRxPacket = 0; //数据包的位置归零
}
}
/*当前状态为1,接收数据包数据,同时判断是否接收到了第一个包尾*/
else if (RxState == 1)
{
if (RxData == '\r') //如果收到第一个包尾
{
RxState = 2; //置下一个状态
}
else //接收到了正常的数据
{
Serial_RxPacket[pRxPacket] = RxData; //将数据存入数据包数组的指定位置
pRxPacket ++; //数据包的位置自增
}
}
/*当前状态为2,接收数据包第二个包尾*/
else if (RxState == 2)
{
if (RxData == '\n') //如果收到第二个包尾
{
RxState = 0; //状态归0
Serial_RxPacket[pRxPacket] = '\0'; //将收到的字符数据包添加一个字符串结束标志
Serial_RxFlag = 1; //接收数据包标志位置1,成功接收一个数据包
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除标志位
}
}
.h文件
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
extern char Serial_RxPacket[];
extern uint8_t Serial_RxFlag;
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
#endif
3.AD部分
注.AD数据转换公式应使用:(AD_GetValue()/4096.0)*500;并不是题目中所给的(AD_GetValue()/1024.0)*500;
管脚声明:
PA0为AD输入口,与温度传感器相连
.c文件
#include "stm32f10x.h" // Device header
/**
* 函 数:AD初始化
* 参 数:无
* 返 回 值:无
*/
void AD_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*设置ADC时钟*/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为模拟输入
/*规则组通道配置*/
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); //规则组序列1的位置,配置为通道0
/*ADC初始化*/
ADC_InitTypeDef ADC_InitStructure; //定义结构体变量
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //连续转换,失能,每转换一次规则组序列后停止
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式,失能,只转换规则组的序列1这一个位置
ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数,为1,仅在扫描模式下,才需要指定大于1的数,在非扫描模式下,只能是1
ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1
/*ADC使能*/
ADC_Cmd(ADC1, ENABLE); //使能ADC1,ADC开始运行
/*ADC校准*/
ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
}
/**
* 函 数:获取AD转换的值
* 参 数:无
* 返 回 值:AD转换的值,范围:0~4095
*/
uint16_t AD_GetValue(void)
{
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发AD转换一次
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //等待EOC标志位,即等待AD转换结束
return ADC_GetConversionValue(ADC1); //读数据寄存器,得到AD转换的结果
}
.h文件
#ifndef __AD_H
#define __AD_H
void AD_Init(void);
uint16_t AD_GetValue(void);
#endif
4.PWM部分
.c文件
#include "stm32f10x.h" // Device header
/**
* 函 数:PWM初始化
* 参 数:无
* 返 回 值:无
*/
void PWM_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA2引脚初始化为复用推挽输出
//受外设控制的引脚,均需要配置为复用模式
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC3Init,配置TIM2的输出比较通道3
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/**
* 函 数:PWM设置CCR
* 参 数:Compare 要写入的CCR的值,范围:0~100
* 返 回 值:无
* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比
* 占空比Duty = CCR / (ARR + 1)
*/
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare); //设置CCR3的值
}
.h文件
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare3(uint16_t Compare);
#endif
5.电机部分(此文件中为了方便我自己添加了Stop函数)
管脚声明:
PA4,PA5为输出口,分别与电机驱动板的IN1,IN2相连
.c文件
#include "stm32f10x.h" // Device header
#include "PWM.h"
/**
* 函 数:直流电机初始化
* 参 数:无
* 返 回 值:无
*/
void Motor_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4和PA5引脚初始化为推挽输出
PWM_Init(); //初始化直流电机的底层PWM
}
/**
* 函 数:直流电机设置速度
* 参 数:Speed 要设置的速度,范围:-100~100
* 返 回 值:无
*/
void Motor_SetSpeed(int8_t Speed)
{
if (Speed >= 0) //如果设置正转的速度值
{
GPIO_SetBits(GPIOA, GPIO_Pin_4); //PA4置高电平
GPIO_ResetBits(GPIOA, GPIO_Pin_5); //PA5置低电平,设置方向为正转
PWM_SetCompare3(Speed); //PWM设置为速度值
}
else //否则,即设置反转的速度值
{
GPIO_ResetBits(GPIOA, GPIO_Pin_4); //PA4置低电平
GPIO_SetBits(GPIOA, GPIO_Pin_5); //PA5置高电平,设置方向为反转
PWM_SetCompare3(-Speed); //PWM设置为负的速度值,因为此时速度值为负数,而PWM只能给正数
}
}
void Motor_stop(void){
GPIO_SetBits(GPIOA, GPIO_Pin_4);
GPIO_SetBits(GPIOA, GPIO_Pin_5);
}
.h文件
#ifndef __MOTOR_H
#define __MOTOR_H
void Motor_Init(void);
void Motor_SetSpeed(int8_t Speed);
void Motor_stop(void);
#endif
6.Delay函数
.c文件
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
.h文件
#ifndef __DELAY_H
#define __DELAY_H
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endif
7.main文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Serial.h"
#include "LCD_1.h"
#include "AD.h"
#include "Motor.h"
#include "string.h"
uint8_t temprature[] = {"TEMPRATURE:"};
//比较函数,用于根据温度是否超过24度来判断是否启动电机
void compare_tem(void){
float tem = (AD_GetValue()/4096.0)*500;
if(tem>= 24.0){Motor_SetSpeed(100);}
else if(tem< 24.0)Motor_stop();
}
int main(void)
{
Serial_Init(); //串口初始化
Motor_Init();
LCD_init();//时钟使能
Lcd_ready();//LCD设置初始化
Lcd_write_str(0,0,temprature);//显示
AD_Init();
while(1){
float tem = (AD_GetValue()/4096.0)*500; //AD数据转换为温度
Lcd_write_num(0, 1, tem , 2); //LCD显示温度
if (Serial_RxFlag == 1) //如果接收到数据包
{
/*将收到的数据包与预设的指令对比,以此决定将要执行的操作*/
if (strcmp(Serial_RxPacket, "运行") == 0) //如果收到指令
{
Serial_SendString("\r\nOK\r\n"); //串口回传一个字符串OK
while(strcmp(Serial_RxPacket, "stop") != 0){
float tem = (AD_GetValue()/4096.0)*500;
Lcd_write_num(0, 1, tem , 2);
compare_tem(); //比较温度
Serial_SendNumber(tem,2); //单片机向串口助手发送温度
Serial_SendString("\r\n");
Delay_ms(50); //手动延时避免刷屏
}
}
else
{
Serial_SendString("ERROR\r\n"); //串口回传一个字符串ERROR
}
Serial_RxFlag = 0; //处理完成后,需要将接收数据包标志位清零,否则将无法接收后续数据包
}
}
}
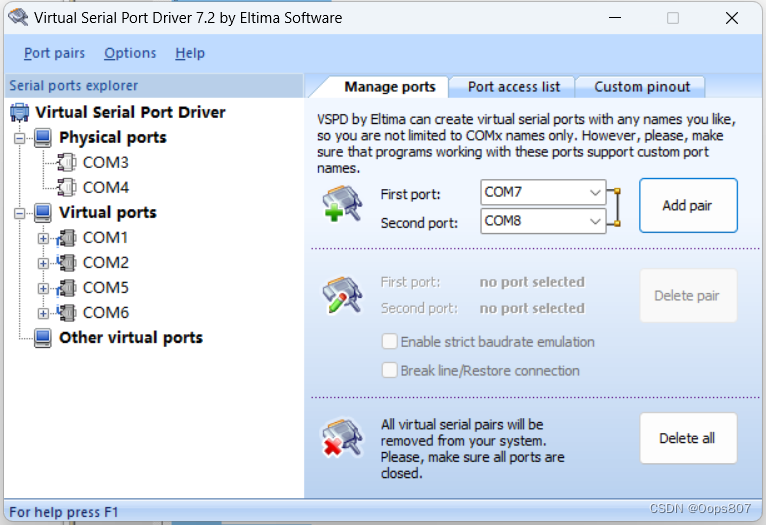
四.VSPD
第一次使用点击Add Pair即可(添加的串口对要和虚拟串口里设置的对应)
五 .XCOM串口助手
波特率设置要与虚拟串口、STM32的设置保持一致
发送指令的格式开头必须为@否则会接收失败
六.总结
1.有一个很容易被忽略的步骤,那就是配置供电网
原理图连接完后的重要一步,在菜单栏的设计里点击“配置供电网”,选择需要连接到GND和VCC/VDD端口。
2. ADC数值不为0而转换为0的问题
这个问题大概率是由转换公式数据类型不匹配造成的,原公式为ADC_Voltage = ADC_Value / 4096 * 3.3,把4096更换为4096.0后解决问题,因为输出电压ADC_Voltage为浮点型数据。
也可能是未设置参考电压,解决办法为单片机上的VSSA要接地并且VDDA要接+5V。
3.新手
本人也是新手,第一次用Proteus联调仿真,也是第一次写博客,如有错误希望大家批评指正。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









