











IMX219 摄像头,800 兆像素和 83 FOV。兼容 Jetson nano 开发套件 (B01)
规格:
- 8 百万像素
- 传感器:索尼IMX219
- 分辨率:3280 × 2464(每台相机)
- 镜头规格:
- CMOS尺寸:1/4英寸
- 焦距:2.6mm
- 视角:83/73/50度(对角线/水平/垂直)
- 失真:<1%
- 基线长度:60mm
- ICM20948:
- 加速度计:
- 分辨率:16 位
- 测量范围(可配置):±2、±4、±8、±16g
- 工作电流:68.9uA
- 陀螺仪:
- 分辨率:16 位
- 测量范围(可配置):±250、±500、±1000、±2000°/秒
- 工作电流:1.23mA
- 磁力计:
- 分辨率:16 位
- 测量范围:±4900μT
- 工作电流:90uA
- 加速度计:
- 尺寸:24mm × 85mm
详细介绍:IMX219-83 Stereo Camera - Waveshare Wiki https://www.waveshare.com/wiki/IMX219-83_Stereo_Camera
https://www.waveshare.com/wiki/IMX219-83_Stereo_Camera
- 硬件连接
- 将两条摄像头排线,金属面朝向散热板插入Jetson Nano 开发套件上的摄像头接口
- 启动Jetson Nano
下面开始测试相机:
- 打开终端(键盘按下Ctrl+ALT+T快捷键打开终端),输入以下指令查看设备是否被正常识别到
ls /dev/video*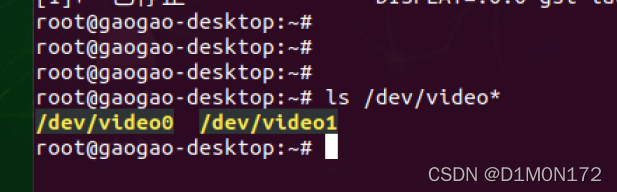
如果出现video0和video1就是正常的
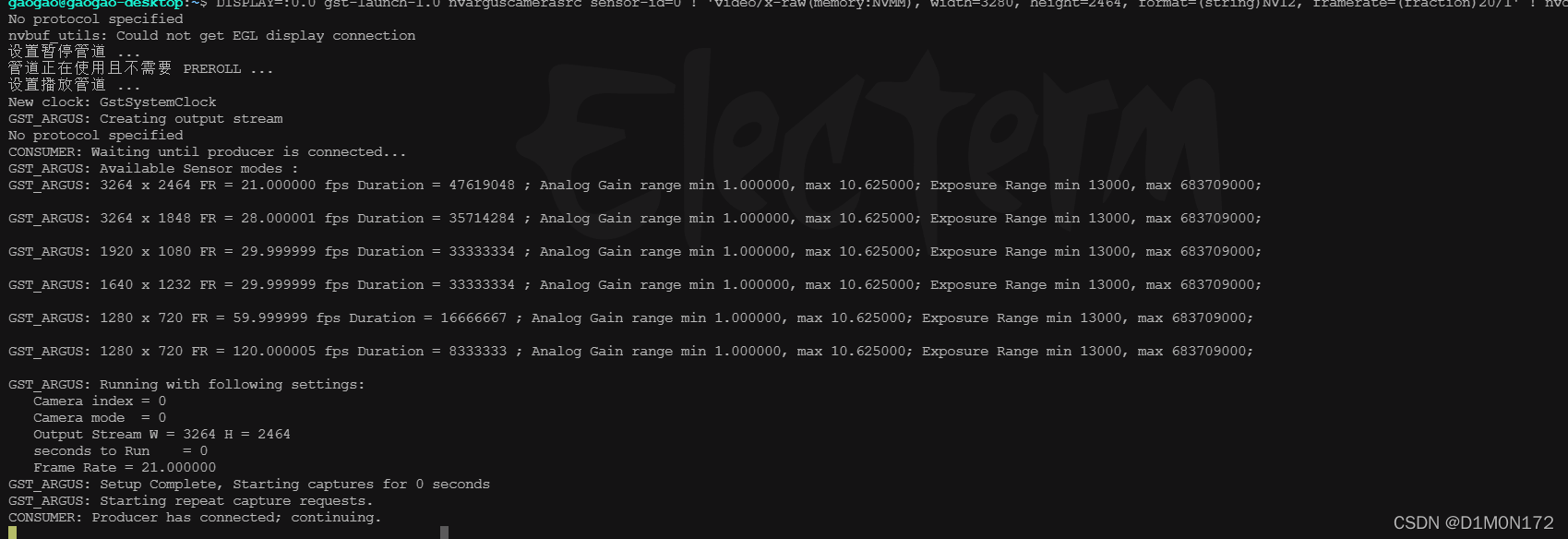
- 测试video0
DISPLAY=:0.0 gst-launch-1.0 nvarguscamerasrc sensor-id=0 ! 'video/x-raw(memory:NVMM), width=3280, height=2464, format=(string)NV12, framerate=(fraction)20/1' ! nvoverlaysink -e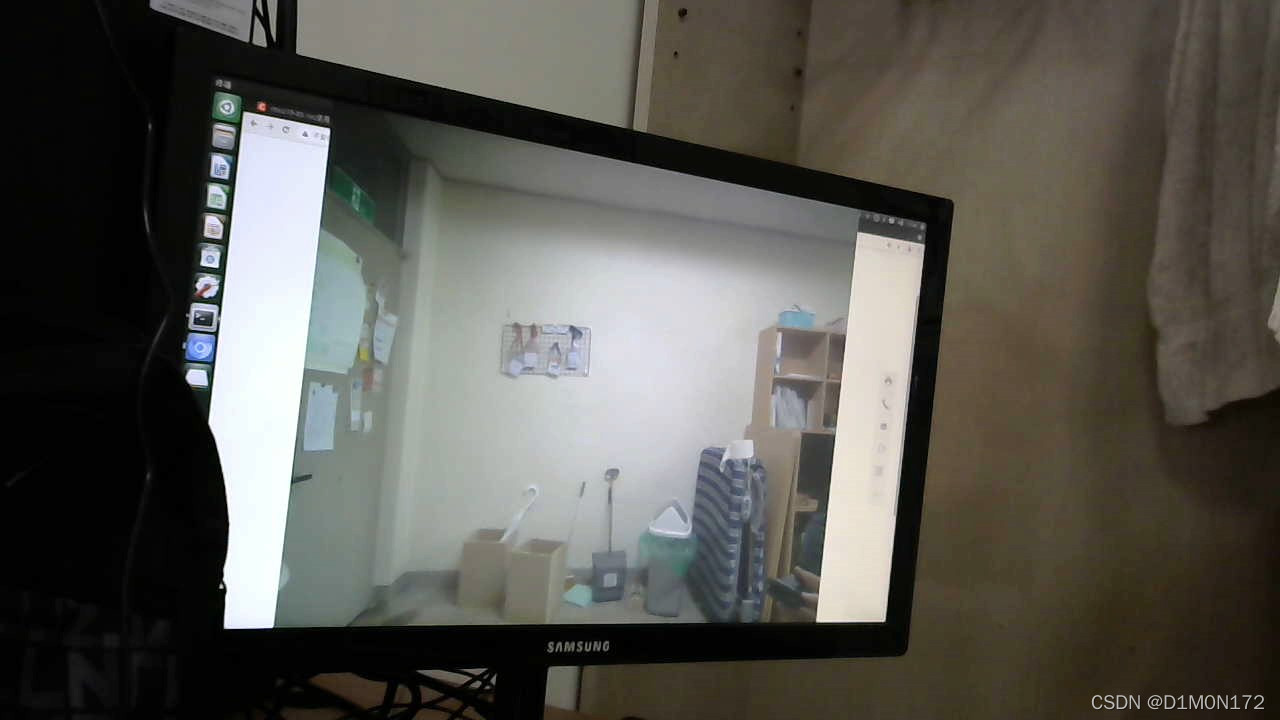
- 测试video1
DISPLAY=:0.0 gst-launch-1.0 nvarguscamerasrc sensor-id=1 ! 'video/x-raw(memory:NVMM), width=3280, height=2464, format=(string)NV12, framerate=(fraction)20/1' ! nvoverlaysink -e- Test the ICM20948
wget https://www.waveshare.com/w/upload/a/a4/D219-9dof.tar.gz
tar zxvf D219-9dof.tar.gz
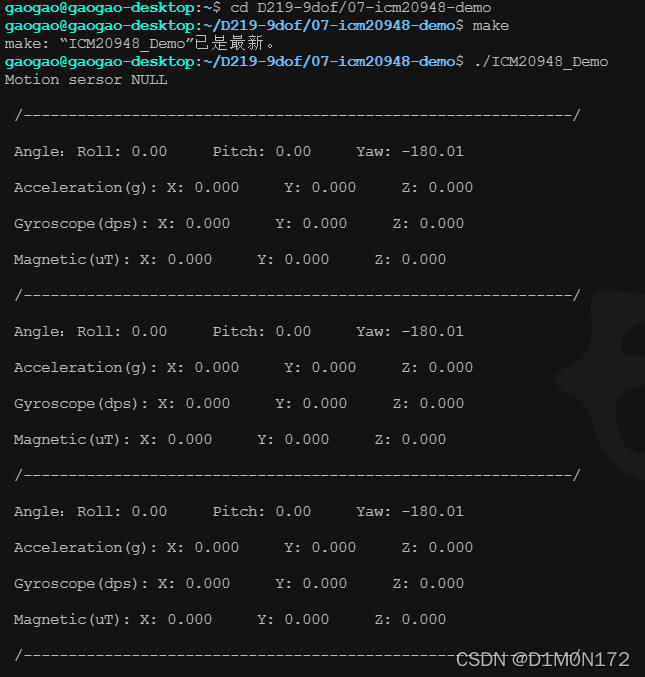
cd D219-9dof/07-icm20948-demo
make
./ICM20948-Demo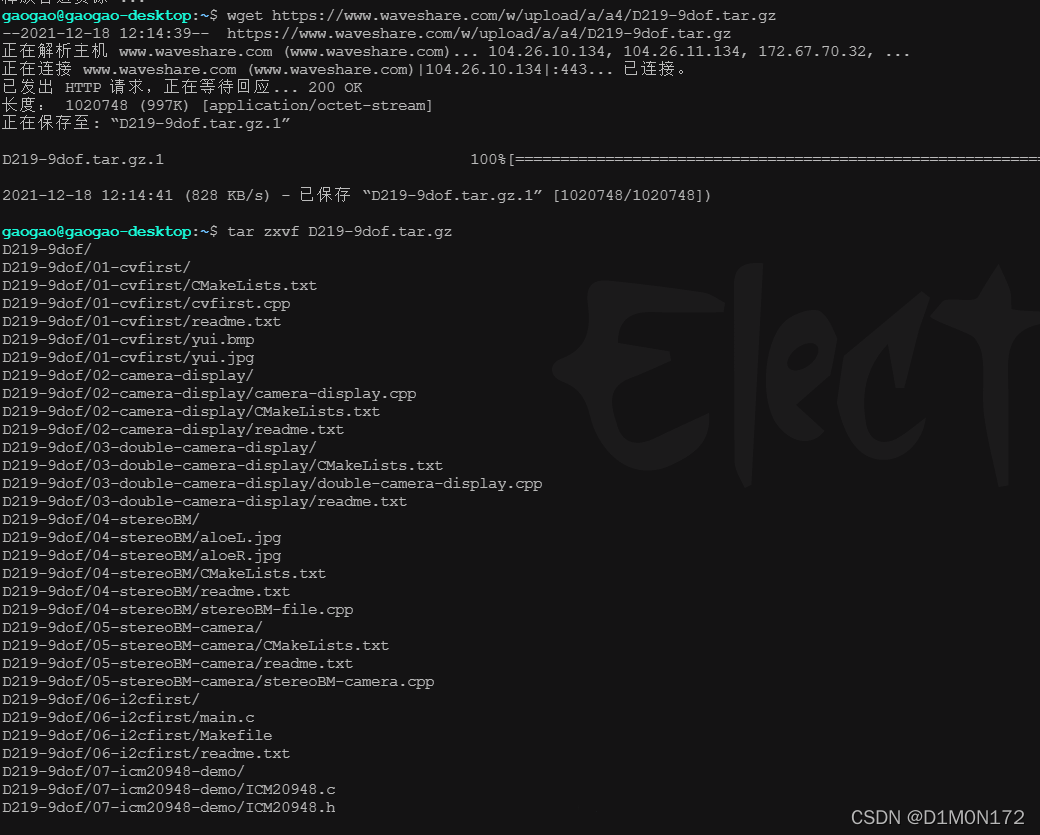
- 如果您发现捕获的图像是红色的。您可以尝试下载 .isp 文件并安装:
wget https://www.waveshare.com/w/upload/e/eb/Camera_overrides.tar.gz
tar zxvf Camera_overrides.tar.gz
sudo cp camera_overrides.isp /var/nvidia/nvcam/settings/
sudo chmod 664 /var/nvidia/nvcam/settings/camera_overrides.isp
sudo chown root:root /var/nvidia/nvcam/settings/camera_overrides.isp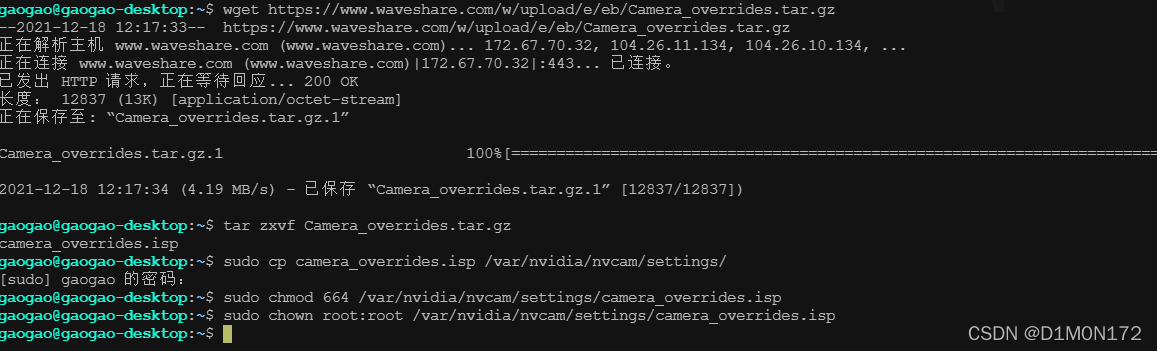
安装ros
参考文献:
melodic/Installation/Ubuntu - ROS Wiki
首先设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'设置密钥
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -这个密钥如果不知道的话可以直接使用 sudo apt update 然后就会出现密钥了 然后把密钥插到后面就好了。
更新
sudo apt update更新之后就开始安装
sudo apt install ros-melodic-desktop-full因为之前安装的时候断了一个可以使用下面的代码
sudo dpkg --configure -a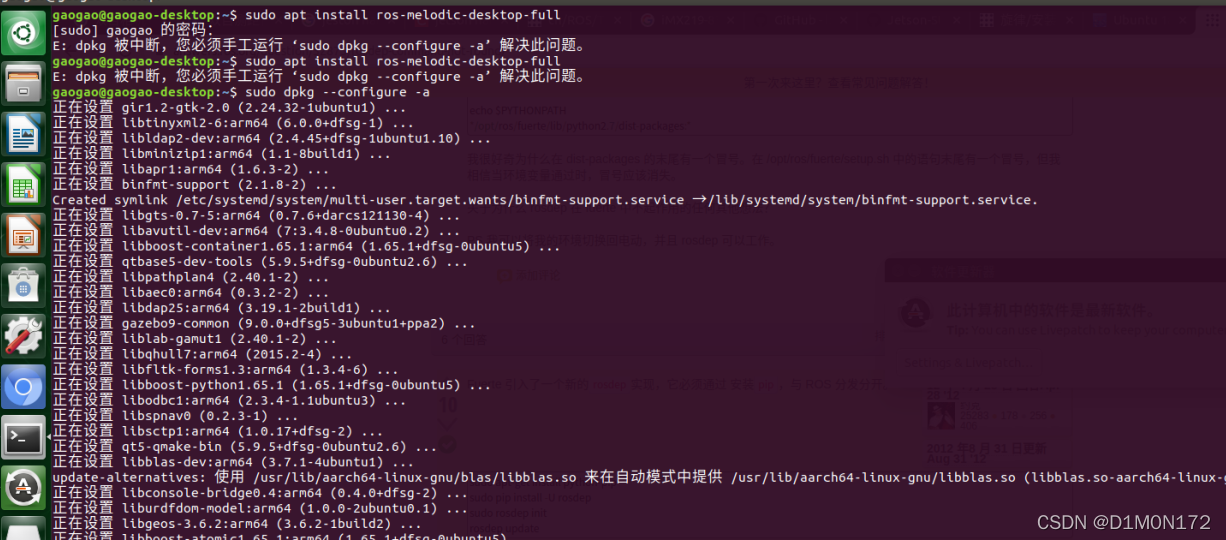
重新安装

设置环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
使用下面的代码看看是否安装成功
roscore
使用下面的代码使用快捷代码安装ros工具包
sudo apt-get install python-pip
sudo pip install -U rosdep
sudo rosdep init
rosdep update(1)
(2)
(3)初始化
参考:
 https://blog.csdn.net/qq_43310597/article/details/106008565
https://blog.csdn.net/qq_43310597/article/details/106008565打开安装的vscode创建:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
source ~/catkin_ws/devel/setup.bash
参考:
打开github网站
 https://dhpark1212.tistory.com/entry/%EB%B9%84%EA%B3%B5%EA%B0%9C-JetsonNano-%EB%AA%A9%EC%B0%A8
https://dhpark1212.tistory.com/entry/%EB%B9%84%EA%B3%B5%EA%B0%9C-JetsonNano-%EB%AA%A9%EC%B0%A8



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











