







使用了STM32CubeMX及Keil(HAL库)
材料:stm32开发板、无源蜂鸣器、4×4矩阵键盘、杜邦线、st-link
实验原理:
1、音高和矩形波周期有关 ,音强和占空比有关(?),通过设置TIM2为PWM,对应按键信息设置不同的方波周期,占空比恒为50%(音量不变),通过CH1(PA0)输出,PA0接无源蜂鸣器正极,无源蜂鸣器另一端接地,于是发出不同频率的声音(周期的数值是网上搜的。。。其中c应该是中央c)
对应的声音的按键如上图
按下按键发出声音
释放按键停止发声
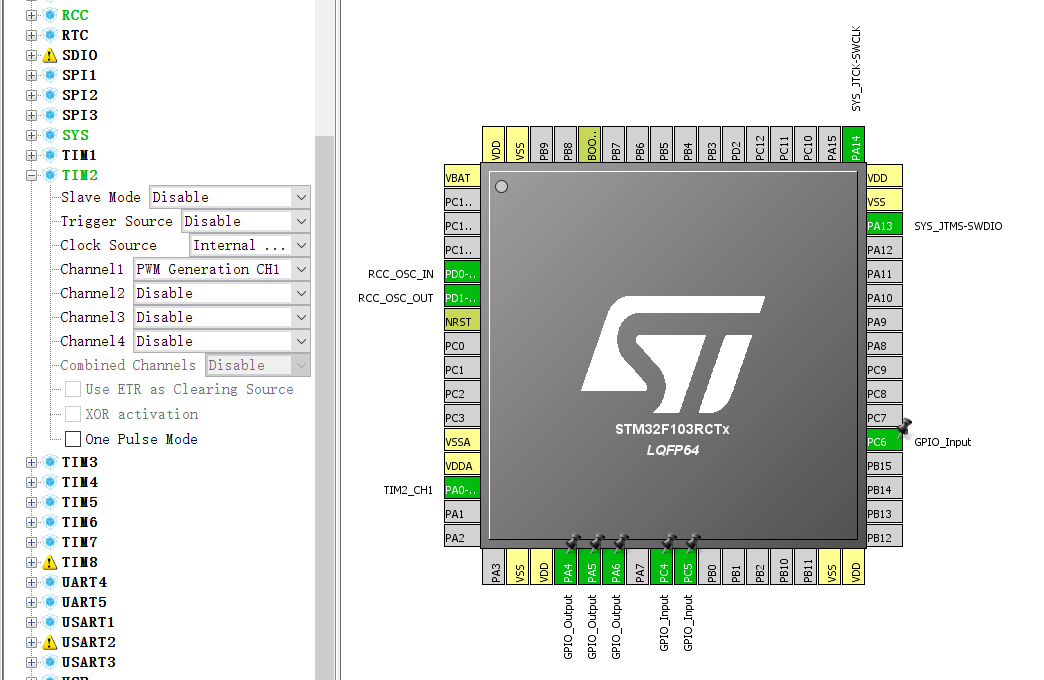
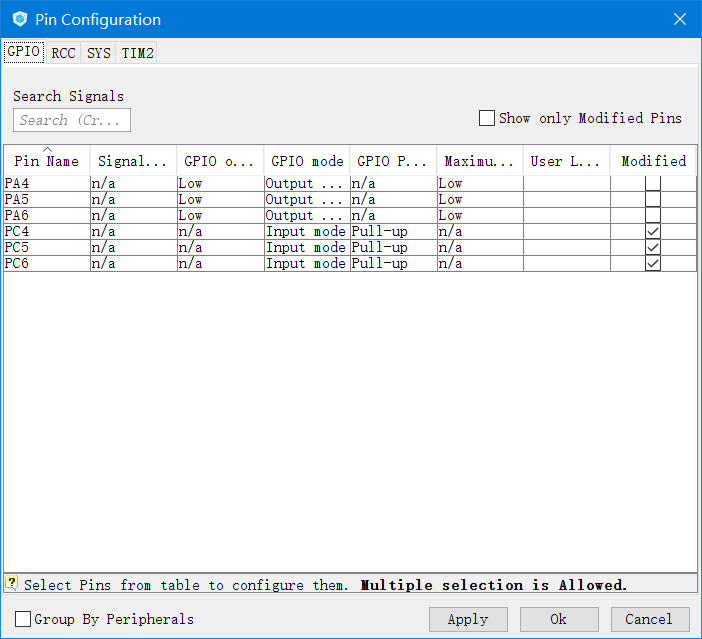
STM32CubeMX中的主要的设置:

主要代码(以下只有USER CODE BEGIN里的代码):
材料:stm32开发板、无源蜂鸣器、4×4矩阵键盘、杜邦线、st-link
实验原理:
1、音高和矩形波周期有关 ,音强和占空比有关(?),通过设置TIM2为PWM,对应按键信息设置不同的方波周期,占空比恒为50%(音量不变),通过CH1(PA0)输出,PA0接无源蜂鸣器正极,无源蜂鸣器另一端接地,于是发出不同频率的声音(周期的数值是网上搜的。。。其中c应该是中央c)
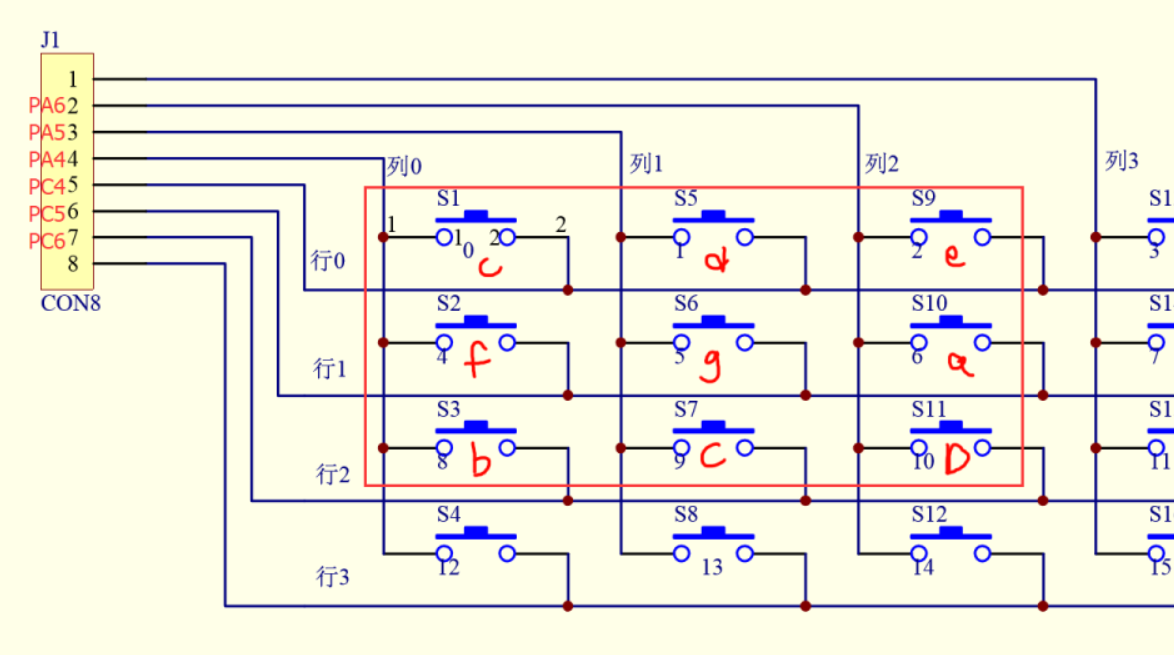
2、只用了4×4的3×3的部分。。。(只发9个音。。。),采用轮询输入
实验设计:
PA0接无源蜂鸣器正极,无源蜂鸣器另一端接地
其它连线如图
对应的声音的按键如上图
按下按键发出声音
释放按键停止发声
STM32CubeMX中的主要的设置:
主要代码(以下只有USER CODE BEGIN里的代码):
main.c:
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
const int tones[] = { 1915, 1700, 1519, 1432, 1275, 1136, 1014, 956,853 }; //大概发出{ 'c', 'd', 'e', 'f', 'g', 'a', 'b', 'C','D' };
const uint16_t keys[]={GPIO_PIN_4,GPIO_PIN_5,GPIO_PIN_6}; //为了让下面的代码更少而写的数组。。。
/* USER CODE END PV *//* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
void beeping(uint16_t pin,uint8_t times);
/* USER CODE END PFP *//* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断3行中是否有按键被按下
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_4)==0){
beeping(GPIO_PIN_4,0);
}
else if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_5)==0){
beeping(GPIO_PIN_5,1);
}
else if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_6)==0){
beeping(GPIO_PIN_6,2);
}
}
/* USER CODE END 3 *//* USER CODE BEGIN 4 */
//发声函数
void beeping(uint16_t pin,uint8_t times){
uint8_t i,key='n';
for(i=0;i<3;i++){//检查是否按下了9个发声按键
HAL_GPIO_TogglePin(GPIOA,keys[i]);
if(HAL_GPIO_ReadPin(GPIOC,pin)==1){
key=i+times*3;
HAL_GPIO_TogglePin(GPIOA,keys[i]);
break;
}
HAL_GPIO_TogglePin(GPIOA,keys[i]);
}
if(!(key=='n')){ //若按下了9个发声按键中的一个
TIM2_REInit(tones[key]*2); //发声
while(HAL_GPIO_ReadPin(GPIOC,pin)==0); //等待释放
HAL_TIM_PWM_Stop(&htim2,TIM_CHANNEL_1); //停止发声
}
}
/* USER CODE END 4 */tim.c
/* USER CODE BEGIN 1 */
//为了调整周期从而改变音调而写的函数,内容是把上面的MX_TIM2_Init()的定义重新写一下
void TIM2_REInit(int period) //传周期
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OC_InitTypeDef sConfigOC;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 71;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = period; //改变周期
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = period/2; //占空比恒为50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
HAL_TIM_MspPostInit(&htim2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); //重启TIM2的CH1
}
/* USER CODE END 1 */tim.h:
/* USER CODE BEGIN Prototypes */
void TIM2_REInit(int period);
/* USER CODE END Prototypes */实验成果:
正常地完成了预定的功能(233















 382
382

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









