






基于车速的变预测时域的MPC自适应轨迹跟踪控制,能够预测时域的, 类似驾驶员模型中的预瞄距离,在不同的车速下,预瞄控制器采用不同预瞄距离产生的控制效果不同,通过carsim与simulink联合仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。
有详细的分析说明和资料,以及本人的,仿真包运行。
ID:81180711575906571
想剁手书屋14
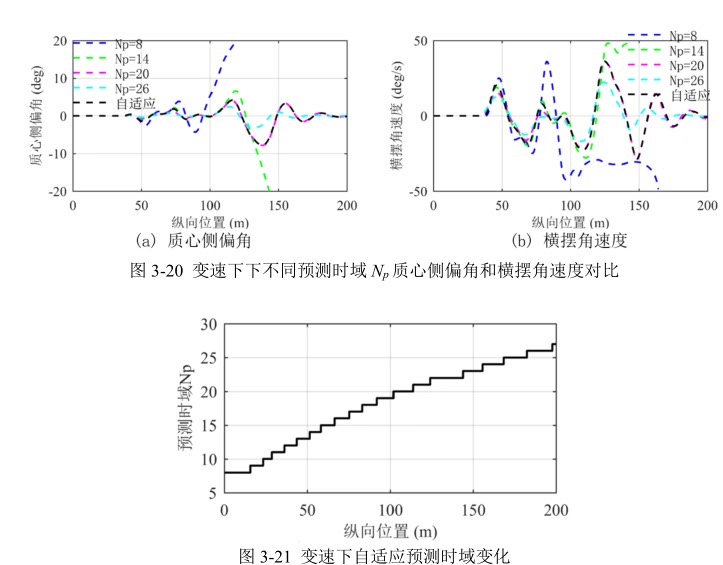
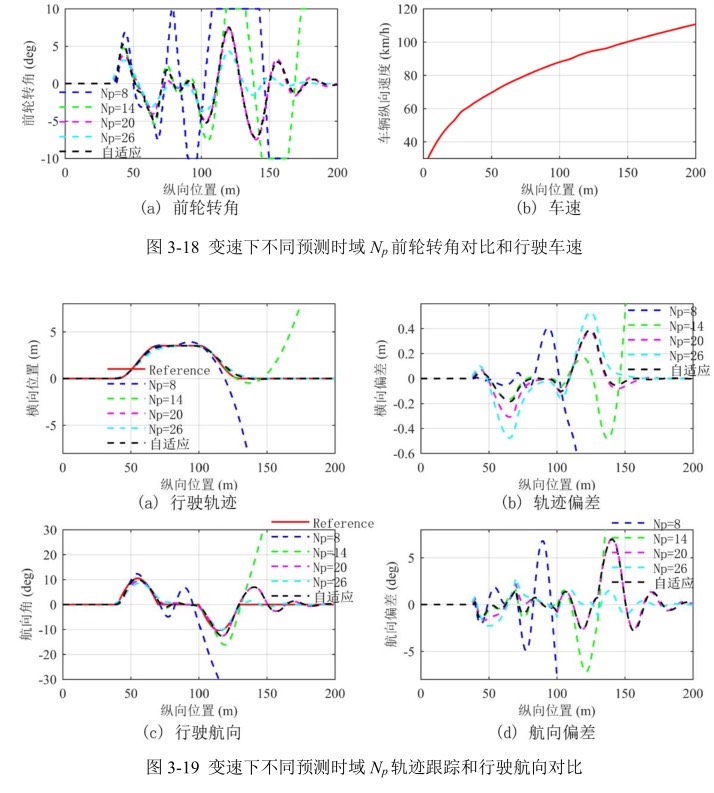
基于车速的变预测时域的MPC自适应轨迹跟踪控制是一种能够预测车辆行驶时域的控制算法,类似于驾驶员模型中的预瞄距离。在不同的车速条件下,预瞄控制器采用不同的预瞄距离来调节控制效果,以实现精准的轨迹跟踪,并解决高速行驶中车辆容易失去稳定性的问题。
在实际驾驶中,车辆需要根据当前的速度来作出相应的控制决策。而在传统的控制算法中,车辆的控制并不会随着车速的变化而调节。这就导致了在不同速度下,车辆的轨迹跟踪精度无法得到有效的保证,而高速行驶时车辆容易出现失去稳定性的问题。因此,基于车速的变预测时域的MPC自适应轨迹跟踪控制算法应运而生。
该算法通过对车速进行实时监测,并根据车速的变化来动态调整预瞄距离和控制策略。当车速较低时,预瞄距离较短,通过对轨迹的实时预测来实现精准的轨迹跟踪;而当车速较高时,预瞄距离适当延长,以平衡车辆的稳定性和轨迹跟踪精度。这样一来,无论是低速行驶还是高速行驶,车辆都能够保持良好的轨迹跟踪效果。
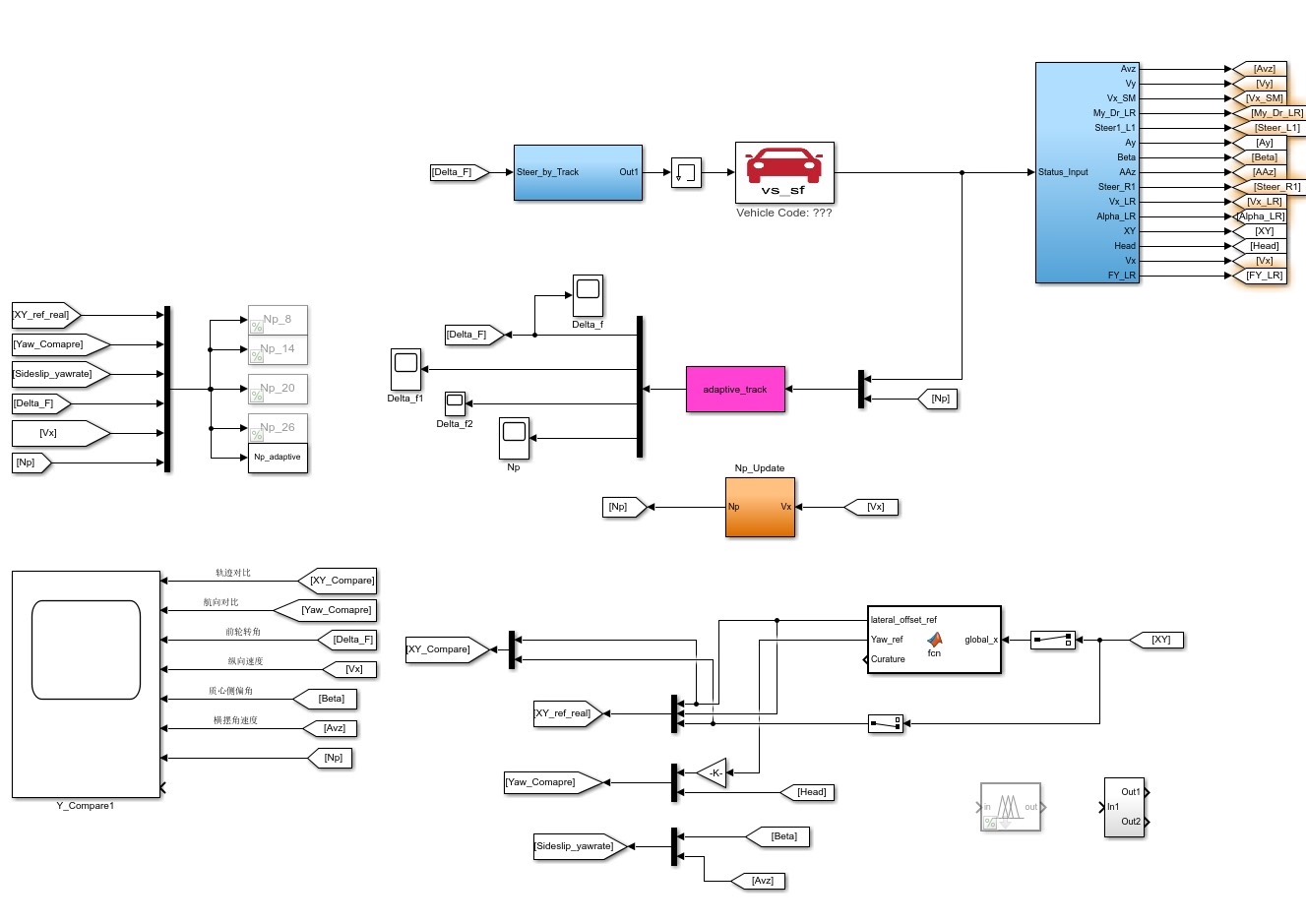
为了验证基于车速的变预测时域的MPC自适应轨迹跟踪控制算法的有效性,我们进行了carsim与simulink联合仿真实验。通过模拟车辆在不同速度下的行驶情况,我们得到了一系列的仿真结果。
在低速行驶下,基于车速的变预测时域的MPC自适应轨迹跟踪控制算法表现出了较高的轨迹跟踪精度。通过实时监测车速,并根据车速调节预瞄距离和控制策略,车辆能够准确地跟踪设定的轨迹,实现更加精准的控制。
而在高速行驶下,车辆容易出现失去稳定性的问题。然而,通过基于车速的变预测时域的MPC自适应轨迹跟踪控制算法,即使在高速行驶下,车辆仍能够保持稳定。通过适当延长预瞄距离,调节控制策略,车辆能够在高速行驶时保持轨迹跟踪精度,并提高稳定性。
综上所述,基于车速的变预测时域的MPC自适应轨迹跟踪控制算法能够根据车速的变化来调节预瞄距离和控制策略,以实现精准的轨迹跟踪并解决高速行驶中的稳定性问题。通过实验验证,该算法在不同速度条件下均表现出良好的控制效果。因此,在实际应用中,可以将该算法应用于车辆控制系统,提高车辆的稳定性和轨迹跟踪精度。
【相关代码,程序地址】:http://fansik.cn/711575906571.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









