





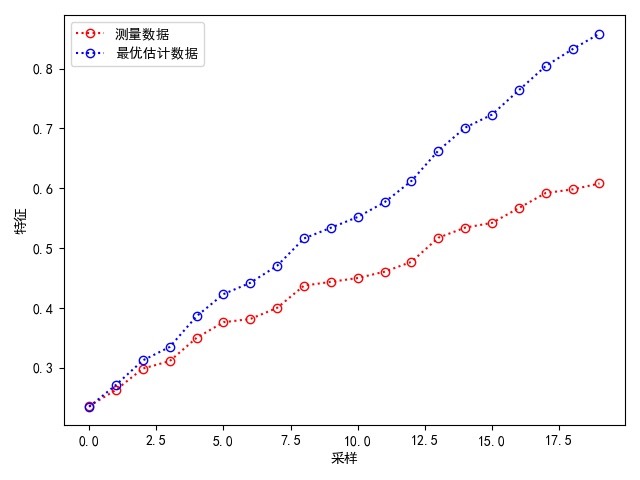
Python程序,这是一个卡尔曼滤波器
Python程序,卡尔曼滤波器,根据测量值和估计值获得最优估计值,数据程序分开,便于使用,注释详细,助于理解
ID:7780687445004895
KeynesH

相关的代码,程序地址如下:http://lanzoup.cn/687445004895.html

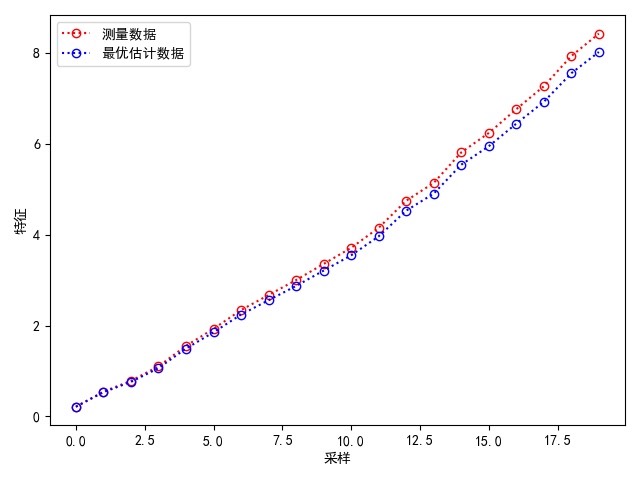
Python程序,这是一个卡尔曼滤波器
Python程序,卡尔曼滤波器,根据测量值和估计值获得最优估计值,数据程序分开,便于使用,注释详细,助于理解
ID:7780687445004895
KeynesH
相关的代码,程序地址如下:http://lanzoup.cn/687445004895.html

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




















 1657
1657





