









Moravec角点检测算子
Moravec 在1981年提出Moravec角点检测算子[1],并将它应用于立体匹配。
首先, 计算每个像素点的兴趣值, 即以该像素点为中心, 取一个w*w(如:5x5)的方形窗口, 计算0度、45度、90度、135度四个方向灰度差的平方和, 取其中的最小值作为该像素点的兴趣值。

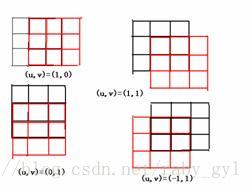
图1- 1 以3x3为例 黑色窗口为I(x,y) 红色窗口为I(x+u,y+v)
其中四种移位 (u,v) = (1,0), (1,1), (0,1), (-1, 1).w(x,y)为方形二值窗口,若像素点在窗口内,则取值为1, 否则为0。
其次,根据实际图像设定一个阈值, 遍历图像以兴趣值大于该阈值的点为候选点。
最后, 选一个一定大小的滑动窗口 , 让该窗口遍历灰度图象, 在此过程中取窗口中兴趣值最大的候选点为特征点, 算法结束。

图1- 2 Moravec角点检测算子对简单图像的响应
Moravec角点检测算子对斜边缘的响应很强,因为只考虑了每隔45度的方向变化,而没有在全部的方向上进行考虑;同时由于窗口函数是一个二值函数,不管像素点离中心点的距离,赋于一样的权重,因此对噪声响应也较强。最终对角点的定位也不是很准确.
[1] Moravec, H. 1981. Rover visual obstacle avoidance. In International Joint Conference on Artificial Intelligence, Vancouver, Canada,pp. 785–790.
opencv代码:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#define M_YUZHI 400
using namespace cv;
using namespace std;
void interestValue(int *a,int &v);//a为5*5窗口数组,v为最小值作为兴趣点
void getmax(int *m_a,int &m_max,int &m_num);//m_a为滑动窗口数组,m_max为寻找的滑动窗口内最大值,m_num为最大值在数组中位置.
int main(int argc,char **argv)
{
Mat mat_src=imread(argv[1],0);
Mat mat_c;
cvtColor(mat_src,mat_c,CV_GRAY2BGR);
int width=mat_src.cols;
int height=mat_src.rows;
int *temp=new int[width*height];
int a[25];//5*5的模板
int b[49];//7*7的模板
int i,j;
for(i=0;i<height;i++)
{
for(j=0;j<width;j++)
{
if(i<2||i>height-3||j<2||j>width-3)//处理边界,设置为0
{
temp[i*width+j]=0;
}
else
{
a[0]=mat_src.at<uchar>(i-2,j-2);
a[1]=mat_src.at<uchar>(i-2,j-1);
a[2]=mat_src.at<uchar>(i-2,j);
a[3]=mat_src.at<uchar>(i-2,j+1);
a[4]=mat_src.at<uchar>(i-2,j+2);
a[5]=mat_src.at<uchar>(i-1,j-2);
a[6]=mat_src.at<uchar>(i-1,j-1);
a[7]=mat_src.at<uchar>(i-1,j);
a[8]=mat_src.at<uchar>(i-1,j+1);
a[9]=mat_src.at<uchar>(i-1,j+2);
a[10]=mat_src.at<uchar>(i,j-2);
a[11]=mat_src.at<uchar>(i,j-1);
a[12]=mat_src.at<uchar>(i,j);
a[13]=mat_src.at<uchar>(i,j+1);
a[14]=mat_src.at<uchar>(i,j+2);
a[15]=mat_src.at<uchar>(i+1,j-2);
a[16]=mat_src.at<uchar>(i+1,j-1);
a[17]=mat_src.at<uchar>(i+1,j);
a[18]=mat_src.at<uchar>(i+1,j+1);
a[19]=mat_src.at<uchar>(i+1,j+2);
a[20]=mat_src.at<uchar>(i+2,j-2);
a[21]=mat_src.at<uchar>(i+2,j-1);
a[22]=mat_src.at<uchar>(i+2,j);
a[23]=mat_src.at<uchar>(i+2,j+1);
a[24]=mat_src.at<uchar>(i+2,j+2);
interestValue(a,temp[i*width+j]);
}
}
}
int m_w1=width/7;//滑动窗口宽
int m_w2=width%7;
int m_h1=height/7;
int m_h2=height%7;
int m_r=0;
int m_c=0;
for(i=0;i<m_h1;i++)
{
for(j=0;j<m_w1;j++)
{
for(int k=0;k<7;k++)
{
b[7*k]=temp[i*width*7+j*7+k*width];
b[7*k+1]=temp[i*width*7+j*7+1+k*width];
b[7*k+2]=temp[i*width*7+j*7+2+k*width];
b[7*k+3]=temp[i*width*7+j*7+3+k*width];
b[7*k+4]=temp[i*width*7+j*7+4+k*width];
b[7*k+5]=temp[i*width*7+j*7+5+k*width];
b[7*k+6]=temp[i*width*7+j*7+6+k*width];
}
int m_tempnum=0;//获取滑动区域的最大值
int m_num=0;//位置
getmax(b,m_tempnum,m_num);
if(m_tempnum>M_YUZHI)
{
m_r=m_num/7;
m_c=m_num%7;
m_r=7*i+m_r;
m_c=7*j+m_c;
circle(mat_c,Point(m_c,m_r),2,Scalar(0,0,255),1,8);
}
}
}
imshow("mat_c",mat_c);
waitKey();
}
void interestValue(int *a,int &v)//得到5*5区域模板的兴趣值
{
int v1,v2,v3,v4;//v1是水平方向,v2是135度方向,v3是垂直方向,v4是45度方向
v1=v2=v3=v4=0;
v1=(a[11]-a[10])*(a[11]-a[10])+(a[12]-a[11])*(a[12]-a[11])+(a[13]-a[12])*(a[13]-a[12])+(a[14]-a[13])*(a[14]-a[13]);
v2=(a[6]-a[0])*(a[6]-a[0])+(a[12]-a[6])*(a[12]-a[6])+(a[18]-a[12])*(a[18]-a[12])+(a[24]-a[18])*(a[24]-a[18]);
v3=(a[7]-a[2])*(a[7]-a[2])+(a[12]-a[7])*(a[12]-a[7])+(a[17]-a[12])*(a[17]-a[12])+(a[22]-a[17])*(a[22]-a[17]);
v4=(a[8]-a[4])*(a[8]-a[4])+(a[12]-a[8])*(a[12]-a[8])+(a[16]-a[12])*(a[16]-a[12])+(a[20]-a[16])*(a[20]-a[16]);
v=v1;
if(v>v2)
v=v2;
if(v>v3)
v=v3;
if(v>v4)
v=v4;
}
void getmax(int *m_a, int &m_max,int &m_num) //得到7*7区域的候选特征值
{
m_max=m_a[0];
for(int i=1;i<49;i++)
{
if(m_max<m_a[i])
{
m_max=m_a[i];
m_num=i;
}
}
}















 4770
4770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









