







(1)Moravec角点检测算法原理
Moravec角点检测算法是最早的角点检测算法之一。该算法将角点定义为具有低“自相关性”的点。算法会检测图像的每一个像素,将像素周边的一个邻域作为一个patch,并检测这个patch和周围其他patch的相关性。这种相关性通过两个patch间的平方差之和(SSD)来衡量,SSD值越小则相似性越高。
如果像素位于平滑图像区域内,周围的patch都会非常相似。如果像素在边缘上,则周围的patch在与边缘正交的方向上会有很大差异,在与边缘平行的方向上则较为相似。而如果像素是各个方向上都有变化的特征点,则周围所有的patch都不会很相似。
Moravec会计算每个像素patch和周围patch的SSD最小值作为强度值,取局部强度最大的点作为特征点。
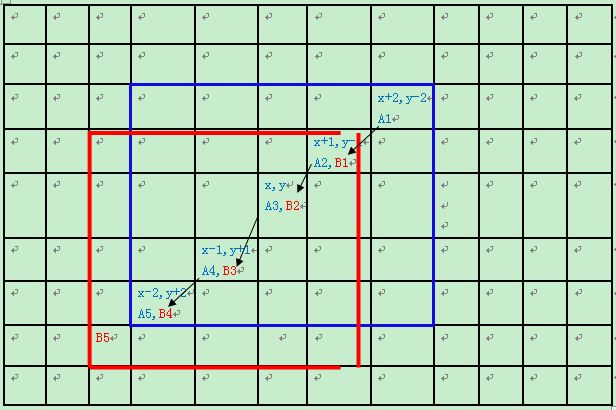
(2)Moravec角点检测示意图:

(3)将moravec角点检测方法公式化:
Moravec 在1981年提出Moravec角点检测算子,并将它应用于立体匹配。
首先, 计算每个像素点的兴趣值, 即以该像素点为中心, 取一个w*w(如:5x5)的方形窗口, 计算0度、45度、90度、135度四个方向灰度差的平方和, 取其中的最小值作为该像素点的兴趣值。
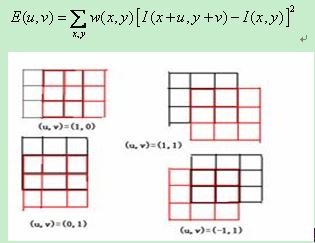
如图以3x3为例 黑色窗口为I(x,y) 红色窗口为I(x+u,y+v)
其中四种移位 (u,v) = (1,0), (1,1), (0,1), (-1, 1).w(x,y)为方形二值窗口,若像素点在窗口内,则取值为1, 否则为0。
(4)moravec角点检测步骤:
(1)对于每一个像素点,计算在E(u,v),在我们的算法中,(u,v)的取值是((1,0), (1,1), (0,1), (-1, 1).当然,你自己可以改成(1,0),(1,1),(0,1),(-1,1),(-1,0),(-1,-1),(0,-1),(1,-1) 8种情况
(2)计算最小值对每个位置minValue = min{E(u,v)},其中(u,v) = (1,0), (1,1), (0,1), (-1, 1).
(3)对每个位置minValue 进行判断,是不是大于设定阈值,如果是大于设定阈值,接着判断是不是局部极大值
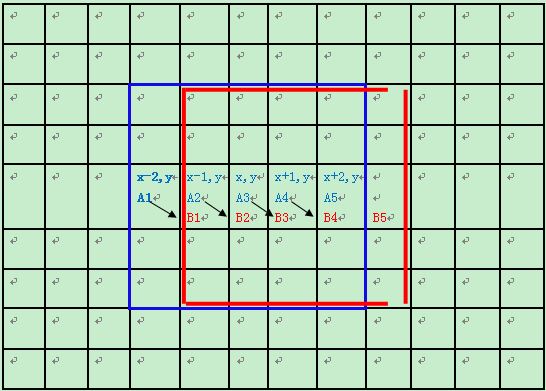
(A1-B1)+(A2-B2)+(A3-B3)+(A4-B4)
A1到A4的 x坐标变化范围:[x-2,x+1]
A1到A4的y坐标不变
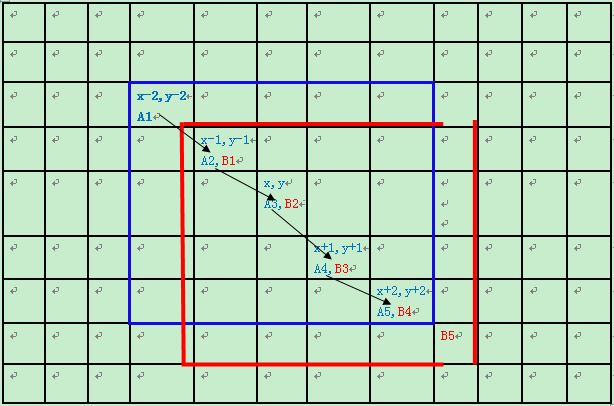
(A1-B1)+(A2-B2)+(A3-B3)+(A4-B4)
A1到A4的x坐标变化范围:[x-2,x+2]
A1到A4的y坐标变化范围:[y-2,y+2]
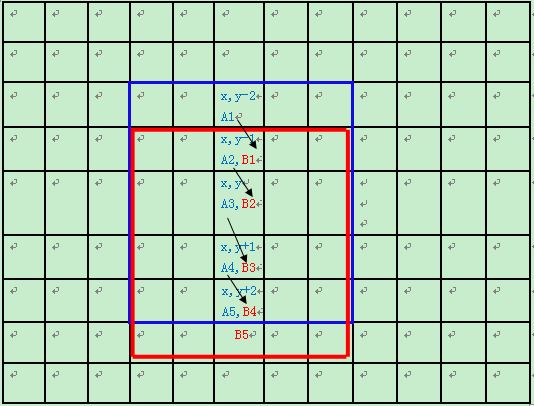
A1到A4的y坐标变化范围:[y-2,y+1]
A1到A4的x坐标变化范围:[x+2,x-1]
A1到A4的y坐标变化范围: [y-2,y+1]
Moravec角点检测算法是最早的角点检测算法之一。该算法将角点定义为具有低“自相关性”的点。算法会检测图像的每一个像素,将像素周边的一个邻域作为一个patch,并检测这个patch和周围其他patch的相关性。这种相关性通过两个patch间的平方差之和(SSD)来衡量,SSD值越小则相似性越高。
如果像素位于平滑图像区域内,周围的patch都会非常相似。如果像素在边缘上,则周围的patch在与边缘正交的方向上会有很大差异,在与边缘平行的方向上则较为相似。而如果像素是各个方向上都有变化的特征点,则周围所有的patch都不会很相似。
Moravec会计算每个像素patch和周围patch的SSD最小值作为强度值,取局部强度最大的点作为特征点。
(2)Moravec角点检测示意图:
(3)将moravec角点检测方法公式化:
Moravec 在1981年提出Moravec角点检测算子,并将它应用于立体匹配。
首先, 计算每个像素点的兴趣值, 即以该像素点为中心, 取一个w*w(如:5x5)的方形窗口, 计算0度、45度、90度、135度四个方向灰度差的平方和, 取其中的最小值作为该像素点的兴趣值。
如图以3x3为例 黑色窗口为I(x,y) 红色窗口为I(x+u,y+v)
其中四种移位 (u,v) = (1,0), (1,1), (0,1), (-1, 1).w(x,y)为方形二值窗口,若像素点在窗口内,则取值为1, 否则为0。
(4)moravec角点检测步骤:
(1)对于每一个像素点,计算在E(u,v),在我们的算法中,(u,v)的取值是((1,0), (1,1), (0,1), (-1, 1).当然,你自己可以改成(1,0),(1,1),(0,1),(-1,1),(-1,0),(-1,-1),(0,-1),(1,-1) 8种情况
(2)计算最小值对每个位置minValue = min{E(u,v)},其中(u,v) = (1,0), (1,1), (0,1), (-1, 1).
(3)对每个位置minValue 进行判断,是不是大于设定阈值,如果是大于设定阈值,接着判断是不是局部极大值
| x-2,y-2 | x-1,y-2 | x,y-2 | x+1,y-2 | x+2,y-2 |
| x-2,y-2 | x-1,y-1 | x,y-1 | x+1,y-1 | x+2,y-1 |
| x-2,y | x-1,y | x,y | x+1,y | x+2,y |
| x-2,y+1 | x-1,y+1 | x,y+1 | x+1,y | x+2,y |
| x-2,y+2 | x-1,y+2 | x,y+2 | x+1,y+2 | x+2,y+2 |
(A1-B1)+(A2-B2)+(A3-B3)+(A4-B4)
A1到A4的 x坐标变化范围:[x-2,x+1]
A1到A4的y坐标不变
(A1-B1)+(A2-B2)+(A3-B3)+(A4-B4)
A1到A4的x坐标变化范围:[x-2,x+2]
A1到A4的y坐标变化范围:[y-2,y+2]
A1到A4的y坐标变化范围:[y-2,y+1]
A1到A4的x坐标变化范围:[x+2,x-1]
A1到A4的y坐标变化范围: [y-2,y+1]
注意在实际使用时还要要进行非局部极大值抑制
下面给出完整代码:
#include "stdafx.h"
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
/**********************************************************************************
*函数 int getMoravec(IplImage* src,CvSeq* corners)
*输入:
*src : 单通道图像
*corners : 用来保存提取到的角点
*threshold : 角点量的阈值 (具体函数 请看视频)
*输出
*corners : 用来保存提取到的角点
*返回值
*角点的个数
***************************************************************************************/
int getMoravec(IplImage* src,CvSeq* corners , float threshold)
{
//窗口大小
const int winSize=5;
int x,y,halfWinSize=winSize/2;
//保存最小的变化量
IplImage* diffDst = cvCreateImage(cvGetSize(src),32,1);
cvZero(diffDst);
//保存角点个数
int cornersCount=0;
//1.计算图像上每一个点上的 在4个方向上的变化量 并计算出最小值 保存在矩阵diffDst中
for(y=halfWinSize;y<src->height-halfWinSize;y++)
{
for(x=halfWinSize;x<src->width-halfWinSize;x++)
{
//compute the reaction in the four directions(0,45,90,135)
int winx;
//数组reaction[4] 用于保持 在四个方向上的灰度值变化量
//minValue用于保存4个变化量中的最小值
float reaction[4],minValue;
reaction[0]=0;
reaction[1]=0;
reaction[2]=0;
reaction[3]=0;
//提示 下面的4个循环 可以综合成一个循环
//0 度方向的变化量保存在reaction[0]中
for( winx=-halfWinSize;winx<halfWinSize;winx++)
{
reaction[0] = reaction[0] + pow( cvGetReal2D(src,y,x+winx)-cvGetReal2D(src,y,x+winx+1), 2 );
}
//45 度方向的变化量保存在reaction[1]中
for( winx=-halfWinSize;winx<halfWinSize;winx++)
{
reaction[1] = reaction[1]+pow(cvGetReal2D(src,y+winx,x+winx)-cvGetReal2D(src,y+winx+1,x+winx+1),2);
}
//90 度方向的变化量保存在reaction[2]中
for( winx=-halfWinSize;winx<halfWinSize;winx++)
{
reaction[2] = reaction[2]+pow(cvGetReal2D(src,y+winx,x)-cvGetReal2D(src,y+winx+1,x),2);
}
//135 度方向的变化量保存在reaction[3]中
for( winx=-halfWinSize;winx<halfWinSize;winx++)
{
reaction[3] = reaction[3]+pow(cvGetReal2D(src,y+winx,x-winx)-cvGetReal2D(src,y+winx+1,x-winx-1),2);
}
//计算4个量中最小值 保存到minValue
minValue = reaction[0];
minValue = minValue > reaction[1] ? reaction[1] : minValue;
minValue = minValue > reaction[2] ? reaction[2] : minValue;
minValue = minValue > reaction[3] ? reaction[3] : minValue;
//将最小的变化量保存到矩阵
cvSetReal2D(diffDst,y,x,minValue);
}
}
//2.获取角点坐标
for(y=halfWinSize;y<src->height-halfWinSize;)
{
for(x=halfWinSize;x<src->width-halfWinSize;)
{
float max=0;
int flag = 0 ;
CvPoint maxLoc;
maxLoc.x = -1;
maxLoc.y = -1;
//首先计算以点(x,y)位中心的winSize*winSize的窗口内部的局部极大值
for(int winy=-halfWinSize;winy<=halfWinSize;winy++)
{
for(int winx=-halfWinSize;winx<=halfWinSize;winx++)
{
float value ;
value = cvGetReal2D(diffDst,y+winy,x+winx);
//计算该窗口内 最大值 保存到max 并保存其坐标到maxLoc
if(value>max)
{
max = value;
maxLoc.x = x+winx;
maxLoc.y = y+winy;
flag = 1;
}
}
}
//如果找到局部极大值 并且该值大于预先设定的阈值 则认为是角点
if(flag==1 && max>threshold)
{
cvSeqPush(corners,&maxLoc);
cornersCount++;
}
//下一个窗口
x=x+halfWinSize;
}
//下一行的第一个窗口
y=y+halfWinSize;
}
cvReleaseImage(&diffDst);
return cornersCount;
}
int main(int argc, char* argv[])
{
IplImage* src;
//加载源图像
src = cvLoadImage("images/1.BMP",CV_LOAD_IMAGE_GRAYSCALE);
if(!src)
{
printf("图像加载失败");
}
//用于保存最终角点的空间
CvMemStorage* mem = cvCreateMemStorage(0);
//角点将会保存在一个CvSeq中
CvSeq* corners;
corners = cvCreateSeq(0,sizeof(CvSeq),sizeof(CvPoint),mem);
//角点的个数
int cornersCount;
//调用函数getMoravec计算角点
cornersCount = getMoravec(src,corners,29500);
//图像show用于显示角的提取结果
IplImage* show= cvCreateImage(cvGetSize(src),8,3);
cvCvtColor(src,show,CV_GRAY2BGR);
//获取每一个角点的坐标
for(int x=0;x<cornersCount;x++)
{
CvPoint* pt = (CvPoint*)cvGetSeqElem(corners,x);
//以角点坐标为中心 绘制一个半径为5的圆
cvCircle(show,*pt,5,cvScalar(255,0,255,0));
}
//显示结果
cvNamedWindow("dst");
cvShowImage("dst",show);
cvWaitKey(0);
cvReleaseImage(&src);
cvReleaseImage(&show);
cvReleaseMemStorage(&mem);
return 0;
}














 7869
7869

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









